
登录注册
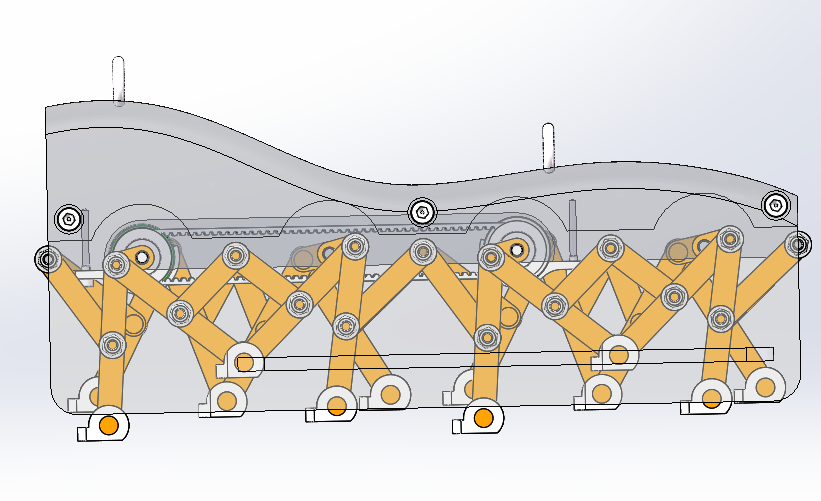
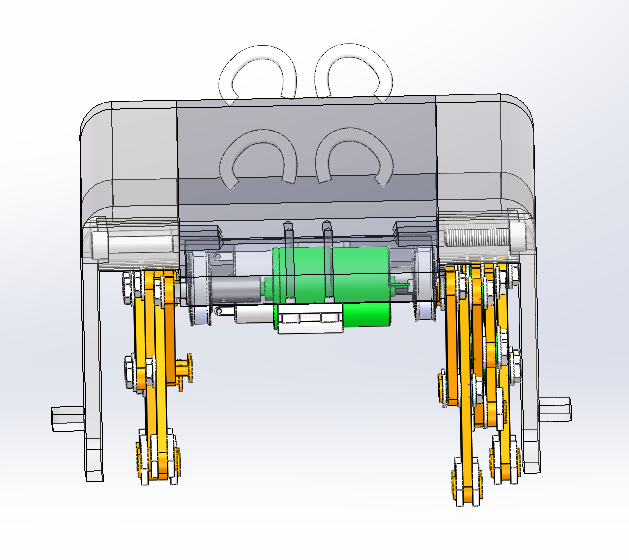
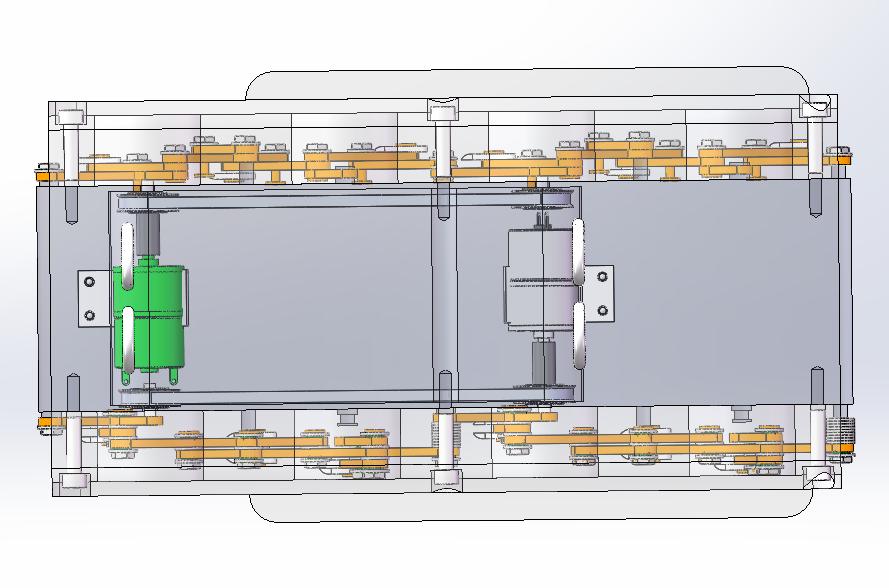
切比雪夫连杆六足机器人(ID:1104754)
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17102176769833.rar | 42.60M |
| 2 | 1.SLDPRT | 33.28M |
| 3 | SCA-M3-L5.SLDPRT | 68.13K |
| 4 | TAAS3M-20-060-H4.SLDPRT | 330.63K |
| 5 | 动画装配体jiqiren.mp4 | 1009.82K |
| 6 | 动画装配体jiqiren.SLDASM | 3.29M |
| 7 | 同步带.SLDPRT | 1.09M |
| 8 | 联轴器.SLDPRT | 123.66K |
| 9 | 轴2.SLDPRT | 77.80K |
| 10 | 轴3.SLDPRT | 78.87K |
| 11 | 销子1_.SLDPRT | 92.71K |
| 12 | 销子2.SLDPRT | 91.46K |
| 13 | 15.sldprt | 98.04K |
| 14 | 16-111.sldprt | 169.22K |
| 15 | 16.sldprt | 410.50K |
| 16 | 17.sldprt | 29.13K |
| 17 | 18.sldprt | 29.86K |
| 18 | 19.sldprt | 30.40K |
| 19 | bashou.SLDASM | 480.71K |
| 20 | bashou.sldasm-Part-2.sldprt | 46.54K |
| 21 | bashou.sldasm-Part-3.sldprt | 46.95K |
| 22 | JGA25-2418DC马达[JGA25-2418-4.4K].sldprt | 305.45K |
| 23 | jiqiren.avi | 3.26M |
| 24 | jiqiren.mp4 | 331.36K |
| 25 | jiqiren3-31-2.mp4 | 876.37K |
| 26 | mirror_15.sldprt | 100.85K |
| 27 | _X2_52A8529B6746_X0_.sldprt | 192.28K |
| 28 | _X2_8DB3_X0_.sldprt | 99.79K |
| 29 | _X2_8F74_X0_.sldprt | 90.16K |
| 30 | _X2_8F74_X0_1.sldprt | 29.67K |
| 31 | 公制法兰系列[MF63].sldprt | 1.16M |
| 32 | 六角螺母六角薄螺母[PNHT-M4].SLDPRT | 102.15K |
| 33 | 六角螺母六角薄螺母[PNHT-M4].step | 31.68K |
| 34 | 外壳.SLDPRT | 163.62K |
| 35 | 小皮带轮.SLDPRT | 96.67K |
| 36 | 平垫圈标准型[PWFZ-5-B].SLDPRT | 67.91K |
| 37 | 平垫圈标准型[PWFZ-5-B].step | 8.73K |
| 38 | 皮带.SLDPRT | 90.90K |
| 39 | 通孔型内六角螺栓[TCBAS5-20].sldprt | 114.11K |
| 40 | 镜向外壳.SLDPRT | 90.79K |
| 41 | 镜向通孔型内六角螺栓[TCBAS5-20].SLDPRT | 55.70K |
| 42 | 零件1^jiqiren.sldprt | 92.54K |
| 43 | 零件2.SLDPRT | 99.28K |
此图纸下载需要40金币
立即下载
发布者
机械小粤
创作: 965
粉丝: 97
加入时间:2023-06-17

模型信息
图纸格式:sldprt,sldasm,step
文件大小:43.63M
所需金币:40
上传时间:2024-03-12 12:28:14
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2022
标签
图纸简介
切比雪夫连杆机构的工作原理是基于连杆的运动传递。当驱动连杆做圆周运动时,从动连杆将被迫做复杂的运动轨迹。通过合理设计连杆长度比例,从动连杆的运动范围可以被控制在一个较小的范围内,从而实现所需的工作运动。该模型为sw2022绘制包含运动仿真视频
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

