
登录注册
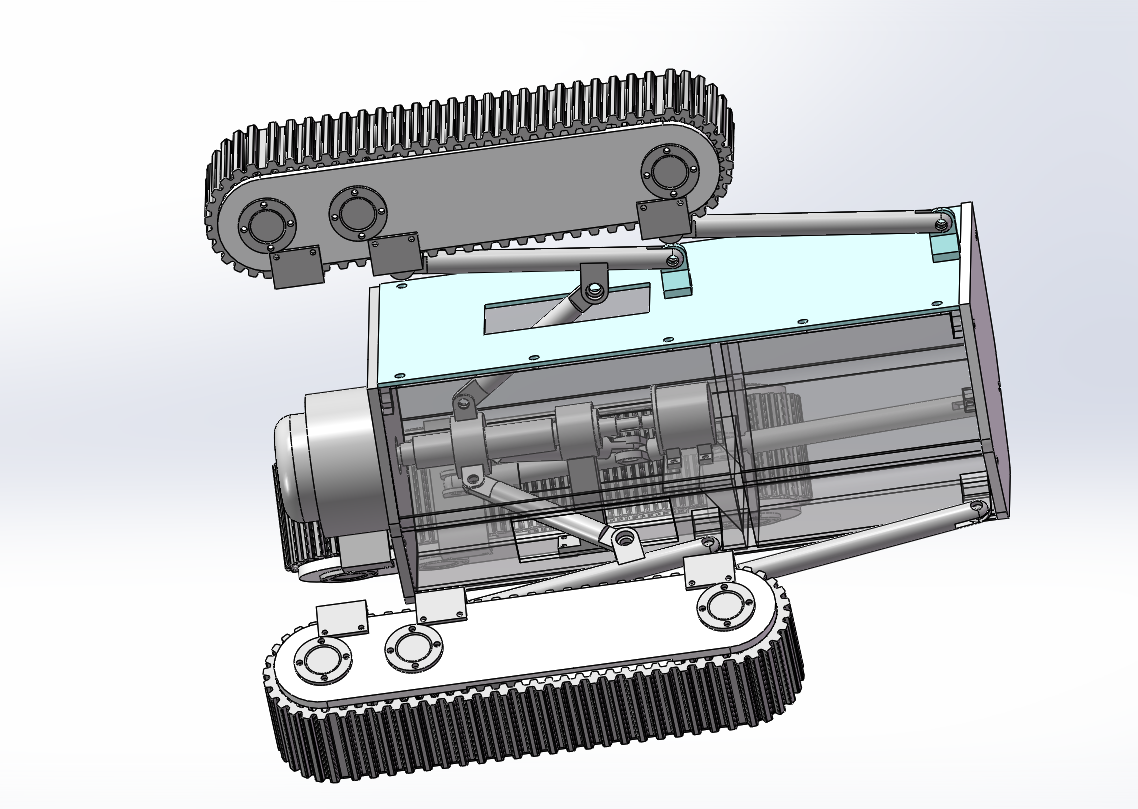
变径管道机器人设计资料SW+CAD+说明书(ID:1114394)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17102887672515.zip | 15.98M |
| 2 | CMOS摄像头.SLDPRT | 46.31K |
| 3 | Solid1.sldprt | 24.02K |
| 4 | Solid1_1.sldprt | 24.35K |
| 5 | Solid1_10.sldprt | 27.96K |
| 6 | Solid1_2.sldprt | 23.40K |
| 7 | Solid1_3.sldprt | 23.58K |
| 8 | Solid1_4.sldprt | 24.38K |
| 9 | Solid1_5.sldprt | 23.86K |
| 10 | Solid1_6.sldprt | 23.89K |
| 11 | Solid1_7.sldprt | 23.72K |
| 12 | Solid1_8.sldprt | 29.03K |
| 13 | Solid1_9.sldprt | 23.53K |
| 14 | Φ700mm-Φ1000mm管道机器人设计——伸缩机构和机身设计毕业设计论文.doc | 977.50K |
| 15 | Φ700mm-Φ1000mm管道机器人设计——移动装置结构设计毕业设计论文.doc | 2.09M |
| 16 | 丝杠.SLDPRT | 52.65K |
| 17 | 丝杠螺母.SLDPRT | 81.77K |
| 18 | 主箱体图.SLDPRT | 217.03K |
| 19 | 侧板01.SLDPRT | 92.12K |
| 20 | 侧板02.SLDPRT | 94.14K |
| 21 | 定径管道布线机器人主体结构设计毕业设计3.doc | 57.00K |
| 22 | 小齿轮.SLDPRT | 372.86K |
| 23 | 履带1.SLDPRT | 2.37M |
| 24 | 履带轮01.SLDPRT | 252.37K |
| 25 | 履带轮02.SLDPRT | 248.90K |
| 26 | 撑开杆组.SLDPRT | 53.45K |
| 27 | 支架.SLDPRT | 69.78K |
| 28 | 滚动轴承B70000CB7004CGB_T292-94.SLDASM | 206.15K |
| 29 | 电机1.SLDPRT | 75.42K |
| 30 | 盖板.SLDPRT | 55.04K |
| 31 | 盖板2.SLDPRT | 51.81K |
| 32 | 移动部分设计.SLDASM | 846.66K |
| 33 | 管道机器人.avi | 1.49M |
| 34 | 管道机器人.SLDASM | 1.11M |
| 35 | 管道机器人移动部分.dwg | 2.19M |
| 36 | 管道机器人装配体.avi | 1.70M |
| 37 | 管道机器人装配体.SLDASM | 1.87M |
| 38 | 管道机器人设计——伸缩机构和机身设计图.dwg | 1.36M |
| 39 | 管道机器人设计——伸缩机构和机身设计图1.dwg | 2.81M |
| 40 | 管道机器人设计原理图.dwg | 582.74K |
| 41 | 管道机器人设计装配12.dwg | 1.36M |
| 42 | 箱盖.SLDPRT | 91.76K |
| 43 | 自动行走管道机器人结构设计毕业设计论文5.18.doc | 1.24M |
| 44 | 踏板1.SLDPRT | 51.54K |
| 45 | 踏板2.SLDPRT | 66.97K |
| 46 | 轴1.SLDPRT | 65.12K |
| 47 | 轴2.SLDPRT | 64.22K |
| 48 | 轴3.SLDPRT | 45.30K |
| 49 | 轴承盖.SLDPRT | 62.40K |
| 50 | 连杆.SLDPRT | 83.74K |
| 51 | 连杆2.SLDPRT | 72.36K |
| 52 | 锥齿轮23.SLDPRT | 374.59K |
| 53 | 锥齿轮30.SLDPRT | 386.31K |
| 54 | 零件27.SLDPRT | 26.94K |
此图纸下载需要250金币
立即下载
发布者
神勇的火车
创作: 15863
粉丝: 150
加入时间:2023-06-06
模型信息
图纸格式:sldprt,sldasm,dwg
文件大小:16.37M
所需金币:250
上传时间:2024-03-13 08:12:56
是否可编辑:可修改,包括参数
版本:SOLIDWORKS
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
![GB/T 825-1988[吊环螺钉M42]](https://html.lazystones.com/lazy/1672092/image/6d306d85-d938-4302-bba1-9efb73aa2717原图(主)0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
猜你喜欢
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)


0.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)

