
登录注册
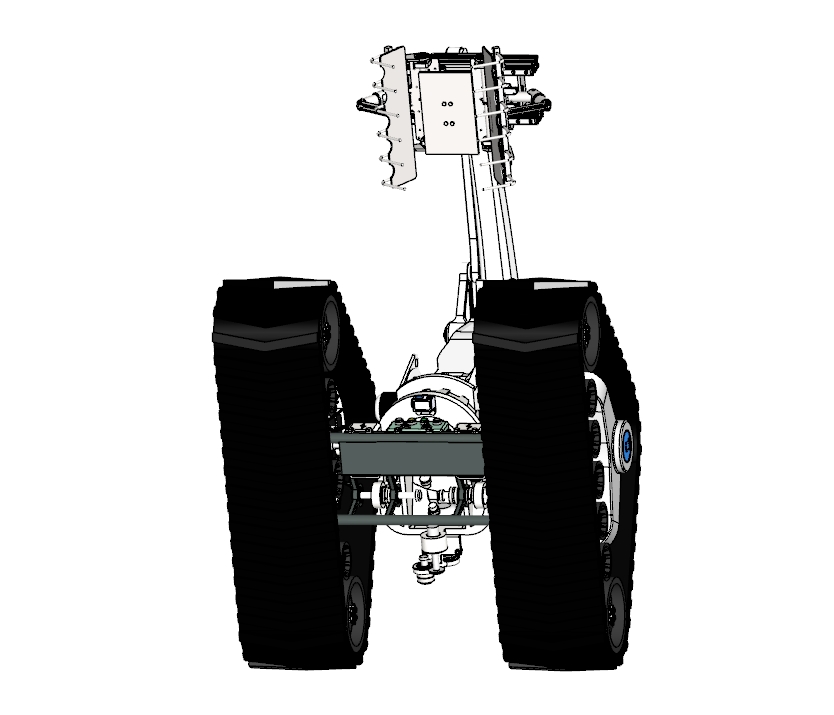
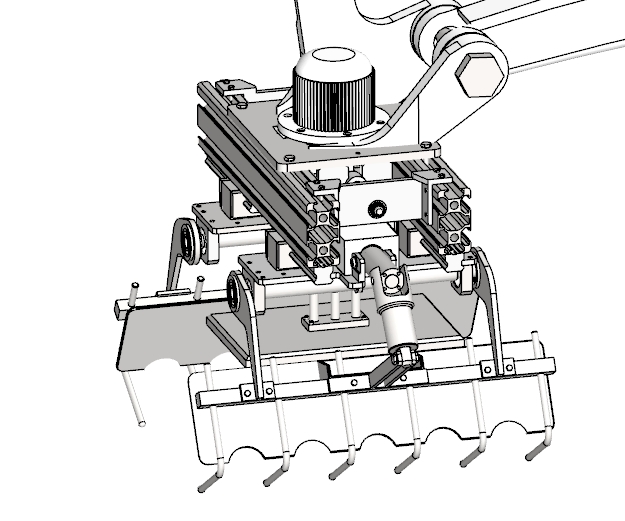
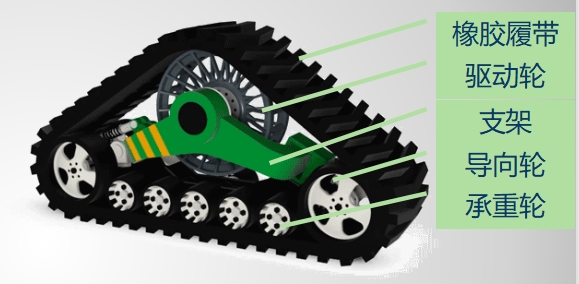
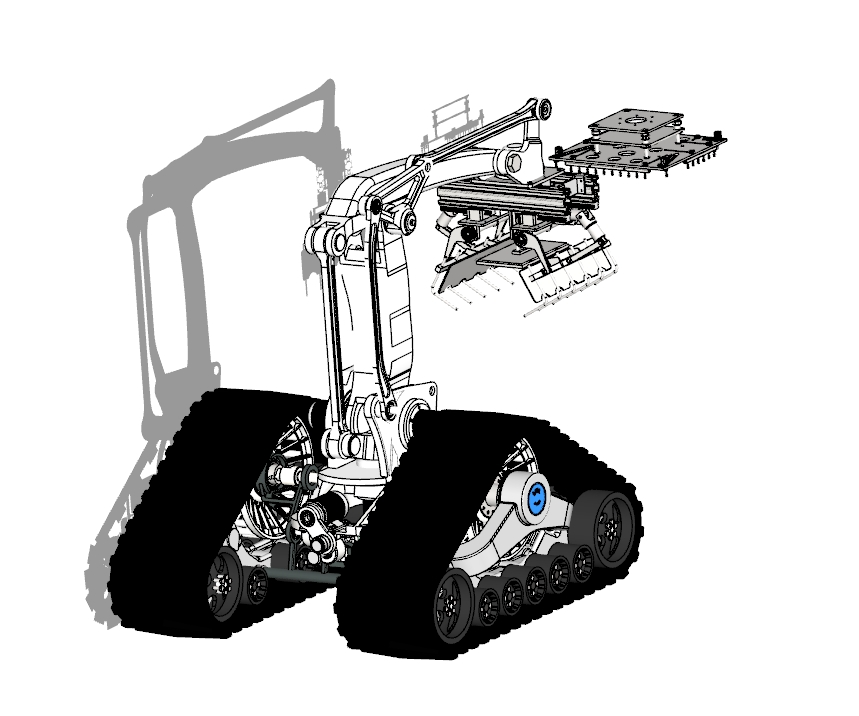
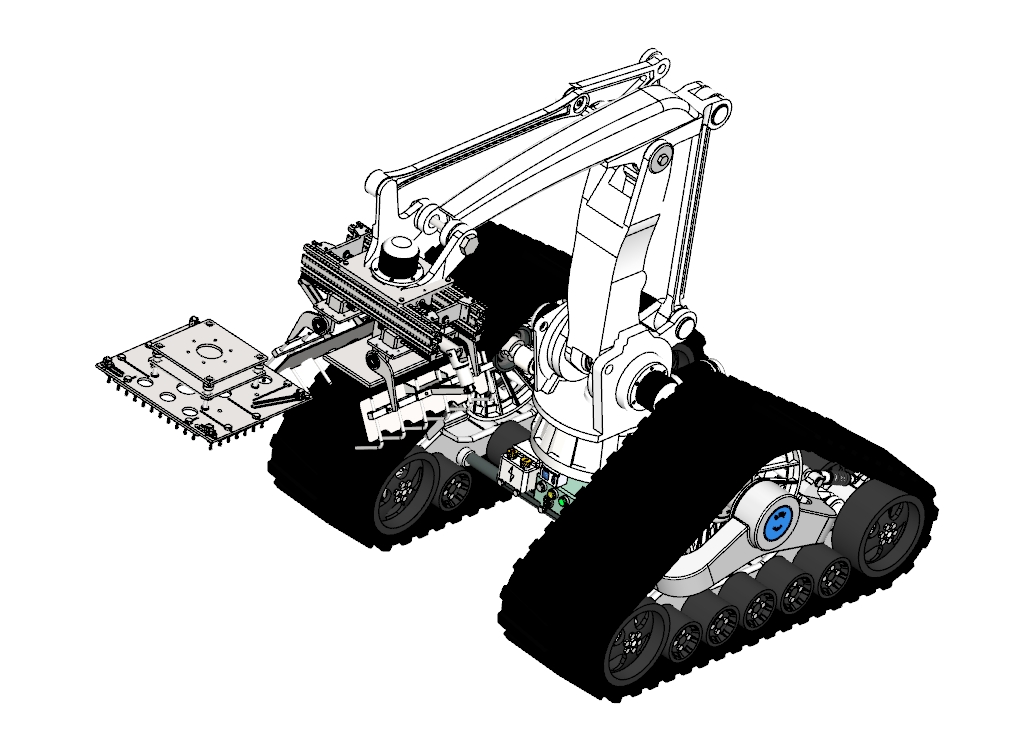
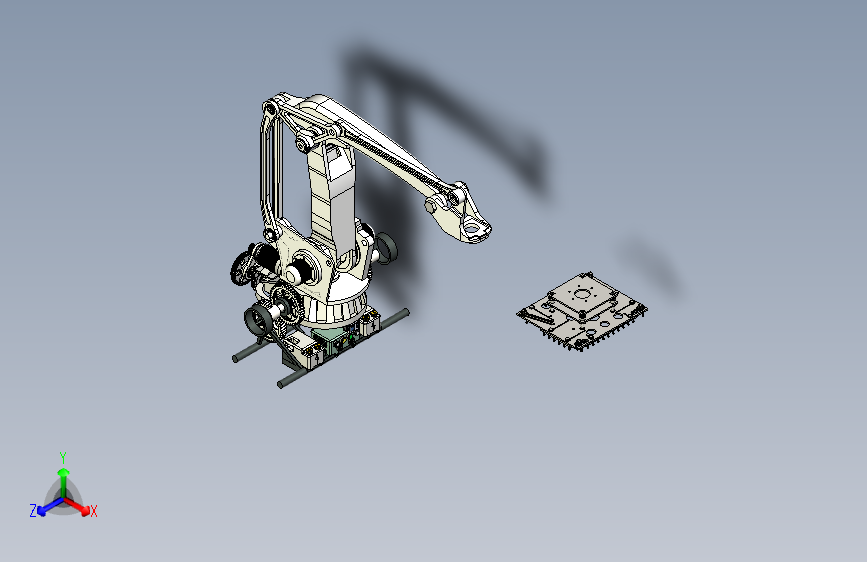
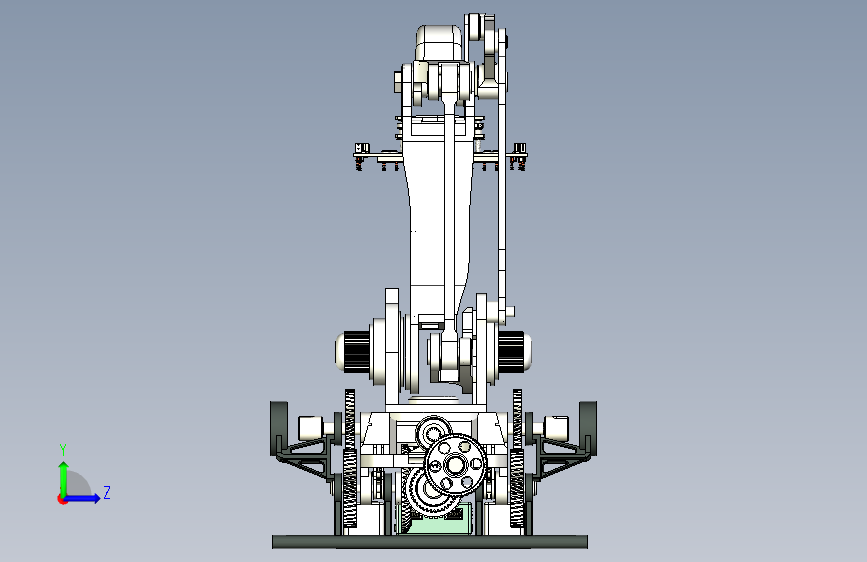
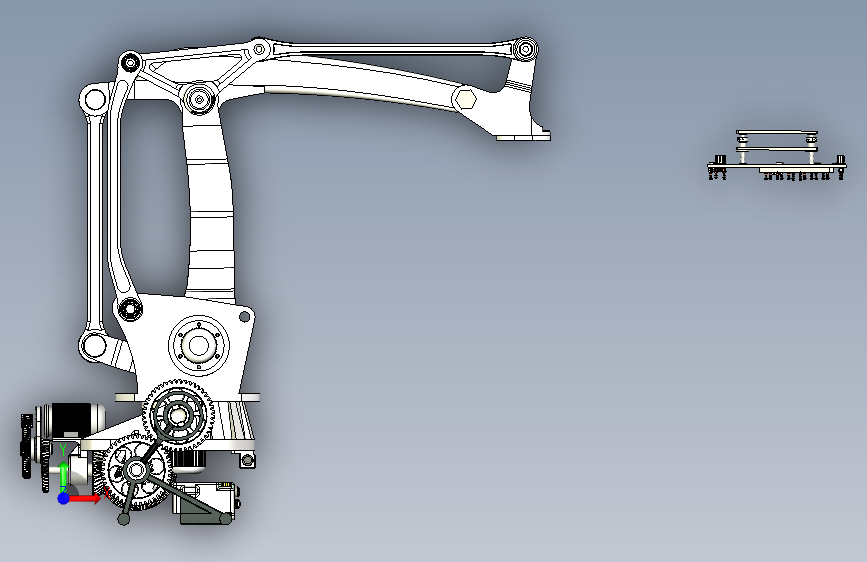
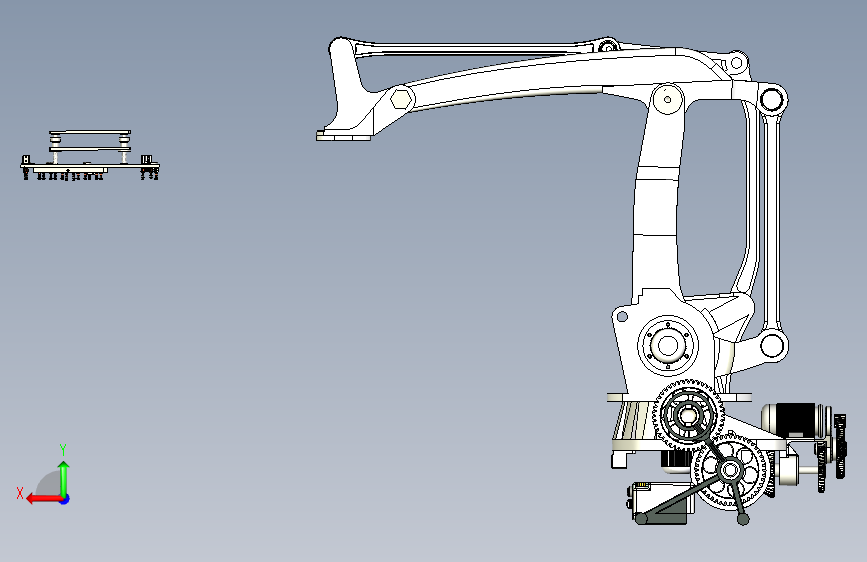
履带式转运机器人(ID:1371243)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1715419569385.rar | 170.20M |
| 2 | packngo.log | 25.86K |
| 3 | S-ARM履带式转运机器人.ipj | 9.62K |
| 4 | S-ARM履带式转运机器人.ipj.old | 9.39K |
| 5 | balloon.xml | 65.90K |
| 6 | centermark.xml | 11.20K |
| 7 | datumtarget.xml | 31.52K |
| 8 | dimension.xml | 3.02M |
| 9 | externalmaterialmapping.xml | 23.05K |
| 10 | featureautoname.xml | 16.08K |
| 11 | featurecontrolframe.xml | 30.95K |
| 12 | hatch.xml | 7.37K |
| 13 | holetable.xml | 1.44M |
| 14 | id.xml | 43.08K |
| 15 | layers.xml | 166.39K |
| 16 | leader.xml | 50.78K |
| 17 | lighting.xml | 62.74K |
| 18 | materialmapping.xml | 202.29K |
| 19 | objectdefaults.xml | 484.83K |
| 20 | partslist.xml | 351.26K |
| 21 | propertymap.xml | 14.21K |
| 22 | proteinmapping.xml | 643.30K |
| 23 | realisticallowedcommands.xml | 29.22K |
| 24 | revisiontable.xml | 108.07K |
| 25 | sheetmetalrules.xml | 6.66K |
| 26 | sheetmetalunfold.xml | 6.18K |
| 27 | standard.xml | 287.47K |
| 28 | studioimagebasedlighting.xml | 14.03K |
| 29 | studiolighting.xml | 52.51K |
| 30 | studioscene.xml | 23.04K |
| 31 | surfacetexture.xml | 23.67K |
| 32 | table.xml | 39.67K |
| 33 | Template.config | 116B |
| 34 | text.xml | 30.40K |
| 35 | viewannotation.xml | 29.53K |
| 36 | weld.xml | 37.87K |
| 37 | weldbead.xml | 15.13K |
| 38 | exportdwg.ini | 1.01K |
| 39 | exportdxf.ini | 1.01K |
| 40 | FaceLoops.xml | 6.31K |
| 41 | FlatPattern.xml | 7.66K |
| 42 | FlatPatternExportOpts.xml | 1.63K |
| 43 | importacad.ini | 994B |
| 44 | importdxf.ini | 986B |
| 45 | importmdt.ini | 990B |
| 46 | Assemblydrawings.tr | 2.76K |
| 47 | Coldpunchingparts.tr | 1.54K |
| 48 | Electricalcases.tr | 2.13K |
| 49 | Forgedparts.tr | 1.52K |
| 50 | Mechanicalparts.tr | 2.12K |
| 51 | Moldparts.tr | 2.51K |
| 52 | Pipes.tr | 1.17K |
| 53 | Steelmoldparts.tr | 2.04K |
| 54 | Surfacecoatings.tr | 384B |
| 55 | Weldassemblies.tr | 1.13K |
| 56 | Assemblydrawings.tr | 2.76K |
| 57 | Coldpunchingparts.tr | 1.54K |
| 58 | Electricalcases.tr | 2.13K |
| 59 | Forgedparts.tr | 1.52K |
| 60 | Mechanicalparts.tr | 2.12K |
| 61 | Moldparts.tr | 2.51K |
| 62 | Pipes.tr | 1.17K |
| 63 | Steelmoldparts.tr | 2.04K |
| 64 | Surfacecoatings.tr | 384B |
| 65 | Weldassemblies.tr | 1.13K |
| 66 | Defaults.ini | 3.73K |
| 67 | MaterialsFavorites.xml | 4.51K |
| 68 | PartsListGroup1.xls | 65.50K |
| 69 | PartsListGroup1b.xls | 71.50K |
| 70 | PartsListTemplate.xls | 55.00K |
| 71 | WeldFavorites.ini | 988B |
| 72 | PropertyMap_Catia.xml | 4.51K |
| 73 | PropertyMap_Creo.xml | 4.38K |
| 74 | PropertyMap_NX.xml | 4.48K |
| 75 | PropertyMap_SW.xml | 5.04K |
| 76 | InventorMaterialLibrary-chs.xlf | 827.77K |
| 77 | InventorMaterialLibrary-cht.xlf | 827.01K |
| 78 | InventorMaterialLibrary-csy.xlf | 864.51K |
| 79 | InventorMaterialLibrary-deu.xlf | 856.66K |
| 80 | InventorMaterialLibrary-eng.xlf | 835.27K |
| 81 | InventorMaterialLibrary-esp.xlf | 857.78K |
| 82 | InventorMaterialLibrary-fra.xlf | 856.89K |
| 83 | InventorMaterialLibrary-hun.xlf | 860.02K |
| 84 | InventorMaterialLibrary-ita.xlf | 864.65K |
| 85 | InventorMaterialLibrary-jpn.xlf | 879.65K |
| 86 | InventorMaterialLibrary-kor.xlf | 854.04K |
| 87 | InventorMaterialLibrary-plk.xlf | 867.01K |
| 88 | InventorMaterialLibrary-ptb.xlf | 856.22K |
| 89 | InventorMaterialLibrary-rus.xlf | 996.64K |
| 90 | InventorMaterialLibrary.adsklib | 153.51K |
| 91 | GraphicsUI.xml | 1.88K |
| 92 | PhysMatUI.xml | 3.01K |
| 93 | CommonSchema.xml | 2.26K |
| 94 | PhysMatSchema.xml | 3.33K |
| 95 | StructuralCommonSchema.xml | 1.71K |
| 96 | StructuralConcreteSchema.xml | 1.16K |
| 97 | StructuralGenericSchema.xml | 616B |
| 98 | StructuralMetalSchema.xml | 723B |
| 99 | StructuralPlasticSchema.xml | 616B |
| 100 | StructuralWoodSchema.xml | 2.96K |
| 101 | ThermalCommonSchema.xml | 1.94K |
| 102 | ThermalGasSchema.xml | 1003B |
| 103 | ThermalLiquidSchema.xml | 1.47K |
| 104 | ThermalSolidSchema.xml | 2.57K |
| 105 | BasicStructuralUI.xml | 1.55K |
| 106 | ConcreteStructuralUI.xml | 12.46K |
| 107 | FatigueStructuralUI.xml | 4.51K |
| 108 | GasStructuralUI.xml | 1.81K |
| 109 | GenericStructuralUI.xml | 12.03K |
| 110 | MetalStructuralUI.xml | 12.16K |
| 111 | PlasticStructuralUI.xml | 12.05K |
| 112 | WoodStructuralUI.xml | 14.29K |
| 113 | GasThermalUI.xml | 2.16K |
| 114 | LiquidThermalUI.xml | 2.62K |
| 115 | SolidThermalUI.xml | 4.12K |
| 116 | clearance.xls | 121.50K |
| 117 | thread.xls | 1.57M |
| 118 | zz1.ipj.bak | 9.62K |
| 119 | zz1.ipj.old.bak | 9.39K |
| 120 | SheetMetal.ipt | 82.00K |
| 121 | Standard.dwg | 162.59K |
| 122 | Standard.iam | 79.50K |
| 123 | Standard.idw | 147.50K |
| 124 | Standard.ipn | 42.50K |
| 125 | Standard.ipt | 76.50K |
| 126 | Weldment.iam | 104.00K |
| 127 | am_ansi.dwg | 260.19K |
| 128 | ANSIin.dwg | 178.90K |
| 129 | ANSIin.idw | 171.00K |
| 130 | SheetMetalin.ipt | 84.00K |
| 131 | Standardin.iam | 79.50K |
| 132 | Standardin.ipn | 42.50K |
| 133 | Standardin.ipt | 76.00K |
| 134 | WeldmentANSI.iam | 188.50K |
| 135 | am_bsi.dwg | 276.34K |
| 136 | am_din.dwg | 327.91K |
| 137 | am_gb.dwg | 317.36K |
| 138 | am_iso.dwg | 316.81K |
| 139 | am_jis.dwg | 273.88K |
| 140 | ANSImm.dwg | 177.90K |
| 141 | ANSImm.idw | 170.00K |
| 142 | BSI.dwg | 123.95K |
| 143 | BSI.idw | 117.50K |
| 144 | DIN.dwg | 137.64K |
| 145 | DIN.idw | 128.00K |
| 146 | GB.dwg | 162.59K |
| 147 | GB.idw | 147.50K |
| 148 | GOST.dwg | 292.82K |
| 149 | GOST.idw | 290.50K |
| 150 | ISO.dwg | 122.07K |
| 151 | ISO.idw | 109.00K |
| 152 | JIS.dwg | 127.17K |
| 153 | JIS.idw | 118.50K |
| 154 | SheetMetalDIN.ipt | 81.50K |
| 155 | SheetMetalmm.ipt | 82.00K |
| 156 | StandardDIN.iam | 66.00K |
| 157 | StandardDIN.ipn | 31.00K |
| 158 | StandardDIN.ipt | 76.50K |
| 159 | Standardmm.iam | 79.50K |
| 160 | Standardmm.ipn | 42.50K |
| 161 | Standardmm.ipt | 76.50K |
| 162 | WeldmentANSI-mm.iam | 188.50K |
| 163 | WeldmentBSI.iam | 188.50K |
| 164 | WeldmentDIN.iam | 189.00K |
| 165 | WeldmentGB.iam | 104.00K |
| 166 | WeldmentISO.iam | 104.00K |
| 167 | WeldmentJIS.iam | 188.50K |
| 168 | zz1.iam | 8.29M |
| 169 | 齿轮组电机.ipt | 1.07M |
| 170 | zz1.0079.iam | 8.28M |
| 171 | 齿轮组电机.0002.ipt | 1.02M |
| 172 | 2040铝型材.ipt | 254.50K |
| 173 | AS1110-M1.6x8.ipt | 188.00K |
| 174 | AS1110-M3x12.ipt | 189.00K |
| 175 | RollingbearingGB_T5800-2003-619_4.ipt | 213.00K |
| 176 | RollingbearingGB_T5800-2003-619_7.ipt | 211.00K |
| 177 | 上活塞.ipt | 191.50K |
| 178 | 上缸体.ipt | 366.00K |
| 179 | 丝杆螺母.ipt | 115.00K |
| 180 | 丝杆轴承座.ipt | 195.50K |
| 181 | 丝杆轴承座_MIR2.ipt | 139.00K |
| 182 | 伸缩杆1.ipt | 219.50K |
| 183 | 伸缩杆2.ipt | 168.00K |
| 184 | 伸缩杆安装板.ipt | 136.50K |
| 185 | 压斜机构.iam | 177.50K |
| 186 | 导轨.ipt | 161.00K |
| 187 | 底板.ipt | 250.50K |
| 188 | 底板_MIR.ipt | 179.50K |
| 189 | 抓手装配.iam | 274.00K |
| 190 | 抓手装配_MIR.iam | 283.00K |
| 191 | 抓钩.ipt | 117.00K |
| 192 | 抓钩_MIR.ipt | 109.00K |
| 193 | 抓钩座.ipt | 124.00K |
| 194 | 抓钩座_MIR.ipt | 105.50K |
| 195 | 挡斜块.ipt | 236.00K |
| 196 | 挡斜块_MIR.ipt | 190.50K |
| 197 | 摆动杆.ipt | 162.50K |
| 198 | 摆动杆_MIR.ipt | 140.50K |
| 199 | 整平气缸杆.ipt | 183.00K |
| 200 | 整平胶座.ipt | 103.50K |
| 201 | 机械抓手.iam | 1.33M |
| 202 | 气缸护盖.ipt | 228.50K |
| 203 | 气缸护盖_MIR.ipt | 196.50K |
| 204 | 活塞.ipt | 99.50K |
| 205 | 活塞_MIR.ipt | 92.50K |
| 206 | 活铰.ipt | 135.50K |
| 207 | 活铰_MIR.ipt | 118.00K |
| 208 | 滑块.ipt | 218.50K |
| 209 | 电机.ipt | 478.50K |
| 210 | 缸体.ipt | 302.50K |
| 211 | 缸体_MIR.ipt | 255.50K |
| 212 | 耳轴座.ipt | 122.00K |
| 213 | 耳轴座_MIR.ipt | 110.50K |
| 214 | 调节丝杆.ipt | 1.17M |
| 215 | 转轴.ipt | 154.50K |
| 216 | 转轴_MIR.ipt | 143.00K |
| 217 | 轴承座.ipt | 136.50K |
| 218 | 轴承座_MIR.ipt | 137.50K |
| 219 | 连接件.ipt | 172.50K |
| 220 | 连接板.ipt | 152.00K |
| 221 | 2040铝型材.0005.ipt | 211.00K |
| 222 | AS1110-M1.6x8.0001.ipt | 188.00K |
| 223 | AS1110-M3x12.0001.ipt | 189.00K |
| 224 | RollingbearingGB_T5800-2003-619_4.0001.ipt | 212.50K |
| 225 | RollingbearingGB_T5800-2003-619_7.0001.ipt | 210.50K |
| 226 | 上活塞.0004.ipt | 127.50K |
| 227 | 上缸体.0011.ipt | 290.50K |
| 228 | 丝杆螺母.0002.ipt | 95.50K |
| 229 | 丝杆轴承座.0017.ipt | 172.50K |
| 230 | 丝杆轴承座_MIR2.0003.ipt | 121.00K |
| 231 | 伸缩杆1.0018.ipt | 149.00K |
| 232 | 伸缩杆2.0008.ipt | 118.50K |
| 233 | 伸缩杆安装板.0005.ipt | 117.50K |
| 234 | 压斜机构.0012.iam | 73.00K |
| 235 | 导轨.0003.ipt | 137.00K |
| 236 | 底板.0015.ipt | 233.00K |
| 237 | 底板_MIR.0009.ipt | 165.00K |
| 238 | 抓手装配.0056.iam | 122.50K |
| 239 | 抓手装配_MIR.0045.iam | 116.50K |
| 240 | 抓钩.0004.ipt | 92.50K |
| 241 | 抓钩_MIR.0007.ipt | 84.00K |
| 242 | 抓钩座.0007.ipt | 121.00K |
| 243 | 抓钩座_MIR.0008.ipt | 95.50K |
| 244 | 挡斜块.0007.ipt | 216.50K |
| 245 | 挡斜块_MIR.0008.ipt | 180.00K |
| 246 | 摆动杆.0007.ipt | 141.50K |
| 247 | 摆动杆_MIR.0008.ipt | 118.50K |
| 248 | 整平气缸杆.0009.ipt | 149.00K |
| 249 | 整平胶座.0003.ipt | 91.50K |
| 250 | 机械抓手.0134.iam | 296.50K |
| 251 | 气缸护盖.0004.ipt | 131.00K |
| 252 | 气缸护盖_MIR.0007.ipt | 116.00K |
| 253 | 活塞.0002.ipt | 89.00K |
| 254 | 活塞_MIR.0006.ipt | 82.50K |
| 255 | 活铰.0006.ipt | 122.00K |
| 256 | 活铰_MIR.0006.ipt | 105.50K |
| 257 | 滑块.0006.ipt | 172.00K |
| 258 | 电机.0018.ipt | 452.00K |
| 259 | 缸体.0015.ipt | 243.50K |
| 260 | 缸体_MIR.0007.ipt | 194.50K |
| 261 | 耳轴座.0003.ipt | 104.50K |
| 262 | 耳轴座_MIR.0006.ipt | 91.50K |
| 263 | 调节丝杆.0012.ipt | 1.15M |
| 264 | 转轴.0005.ipt | 121.00K |
| 265 | 转轴_MIR.0007.ipt | 110.00K |
| 266 | 轴承座.0006.ipt | 111.50K |
| 267 | 轴承座_MIR.0007.ipt | 104.50K |
| 268 | 连接件.0007.ipt | 160.50K |
| 269 | 连接板.0004.ipt | 127.00K |
| 270 | 锥齿轮11.ipt | 957.50K |
| 271 | 锥齿轮21.ipt | 711.50K |
| 272 | 锥齿轮11.0003.ipt | 922.50K |
| 273 | 锥齿轮21.0003.ipt | 682.00K |
| 274 | m8垫圈.ipt | 96.00K |
| 275 | 上臂.ipt | 792.50K |
| 276 | 上连杆.ipt | 236.50K |
| 277 | 下臂.ipt | 565.00K |
| 278 | 下连杆.ipt | 187.00K |
| 279 | 后下连杆.ipt | 332.00K |
| 280 | 后连杆.ipt | 252.00K |
| 281 | 底座.ipt | 715.50K |
| 282 | 机械手连接件.ipt | 393.00K |
| 283 | 机械臂.iam | 678.50K |
| 284 | 电机.ipt | 463.00K |
| 285 | 螺栓GB_T5782M5x25.ipt | 184.50K |
| 286 | 螺栓GB_T5783M8x16.ipt | 187.50K |
| 287 | 轴.ipt | 124.00K |
| 288 | 轴2.ipt | 114.00K |
| 289 | 轴承1.ipt | 206.50K |
| 290 | 轴承2-12.ipt | 315.00K |
| 291 | 轴承3-17.ipt | 325.50K |
| 292 | 轴承4-20.ipt | 330.00K |
| 293 | 轴承5-10.ipt | 221.50K |
| 294 | 连接盘.ipt | 457.00K |
| 295 | m8垫圈.0001.ipt | 95.50K |
| 296 | 上臂.0026.ipt | 777.00K |
| 297 | 上连杆.0009.ipt | 225.00K |
| 298 | 下臂.0021.ipt | 546.00K |
| 299 | 下连杆.0012.ipt | 180.50K |
| 300 | 后下连杆.0016.ipt | 310.00K |
| 301 | 后连杆.0012.ipt | 252.50K |
| 302 | 底座.0033.ipt | 686.00K |
| 303 | 机械手连接件.0013.ipt | 393.00K |
| 304 | 机械臂.0084.iam | 164.00K |
| 305 | 电机.0016.ipt | 453.50K |
| 306 | 螺栓GB_T5782M5x25.0001.ipt | 184.50K |
| 307 | 螺栓GB_T5783M8x16.0001.ipt | 187.50K |
| 308 | 轴.0011.ipt | 147.50K |
| 309 | 轴2.0008.ipt | 114.00K |
| 310 | 轴承1.0001.ipt | 206.50K |
| 311 | 轴承2-12.0001.ipt | 314.00K |
| 312 | 轴承3-17.0001.ipt | 324.50K |
| 313 | 轴承4-20.0001.ipt | 329.00K |
| 314 | 轴承5-10.0001.ipt | 221.00K |
| 315 | 连接盘.0012.ipt | 446.50K |
| 316 | LHFR.ipt | 180.00K |
| 317 | T型螺母.ipt | 140.00K |
| 318 | 传感器支架.ipt | 139.50K |
| 319 | 吸盘及杆.ipt | 188.00K |
| 320 | 吸盘安装座-短.ipt | 191.00K |
| 321 | 吸盘安装座.ipt | 171.50K |
| 322 | 吸盘安装板.ipt | 324.00K |
| 323 | 固定夹紧块.ipt | 193.50K |
| 324 | 垫片.ipt | 89.00K |
| 325 | 导向轴.ipt | 133.00K |
| 326 | 弹簧.ipt | 302.00K |
| 327 | 感应器.ipt | 92.00K |
| 328 | 抖动支架.ipt | 138.00K |
| 329 | 抖动气缸安装板.ipt | 152.50K |
| 330 | 抖动气缸组装.iam | 201.00K |
| 331 | 旋钮把手.ipt | 147.00K |
| 332 | 气动吸盘.iam | 452.00K |
| 333 | 气缸连接头.ipt | 154.50K |
| 334 | 气缸连接板.ipt | 139.00K |
| 335 | 泵.ipt | 259.50K |
| 336 | 缓冲装置.iam | 343.50K |
| 337 | 连接板.ipt | 166.00K |
| 338 | LHFR.0002.ipt | 126.00K |
| 339 | T型螺母.0002.ipt | 104.00K |
| 340 | 传感器支架.0001.ipt | 115.50K |
| 341 | 吸盘及杆.0004.ipt | 163.00K |
| 342 | 吸盘安装座-短.0005.ipt | 173.50K |
| 343 | 吸盘安装座.0006.ipt | 154.50K |
| 344 | 吸盘安装板.0004.ipt | 289.00K |
| 345 | 固定夹紧块.0004.ipt | 155.00K |
| 346 | 垫片.0001.ipt | 74.00K |
| 347 | 导向轴.0004.ipt | 84.50K |
| 348 | 弹簧.0003.ipt | 265.50K |
| 349 | 感应器.0001.ipt | 78.50K |
| 350 | 抖动支架.0003.ipt | 108.50K |
| 351 | 抖动气缸安装板.0003.ipt | 127.00K |
| 352 | 抖动气缸组装.0005.iam | 76.00K |
| 353 | 旋钮把手.0002.ipt | 110.50K |
| 354 | 气动吸盘.0016.iam | 562.00K |
| 355 | 气缸连接头.0003.ipt | 113.00K |
| 356 | 气缸连接板.0002.ipt | 123.50K |
| 357 | 泵.0006.ipt | 213.50K |
| 358 | 缓冲装置.0007.iam | 81.00K |
| 359 | 连接板.0003.ipt | 142.50K |
| 360 | AS1110-M5x10.ipt | 200.00K |
| 361 | AS1110-M8x12.ipt | 212.00K |
| 362 | ISO2491-A6x4x14.ipt | 137.00K |
| 363 | MIRAS1110-M5x10.ipt | 220.00K |
| 364 | MIRAS1110-M8x12.ipt | 214.50K |
| 365 | MIRISO2491-A6x4x14.ipt | 141.00K |
| 366 | MIR垫片AS1237-8.ipt | 119.00K |
| 367 | MIR导向轮.ipt | 599.00K |
| 368 | MIR导向轮轮法兰盘.ipt | 515.50K |
| 369 | MIR导向轮轴.ipt | 360.00K |
| 370 | MIR导向轮轴承.ipt | 248.00K |
| 371 | MIR导向轮轴承架.ipt | 169.00K |
| 372 | MIR导向轮轴承架套筒.ipt | 122.00K |
| 373 | MIR导向轮轴承架套筒2.ipt | 106.50K |
| 374 | MIR导向轮轴承架紧固螺帽.ipt | 331.50K |
| 375 | MIR履带3.ipt | 762.00K |
| 376 | MIR承重杆.ipt | 514.50K |
| 377 | MIR承重轮.ipt | 2.04M |
| 378 | MIR承重轮法兰.ipt | 130.50K |
| 379 | MIR承重轮轴.ipt | 119.00K |
| 380 | MIR承重轮轴承.ipt | 250.50K |
| 381 | MIR横杆.ipt | 816.00K |
| 382 | MIR螺母ANSIB18.2.4.2M-M5x0.8-8.ipt | 207.00K |
| 383 | MIR行走装置.iam | 1.57M |
| 384 | MIR轴承6006-ZGB_T276-94.ipt | 384.00K |
| 385 | MIR连接杆1.ipt | 277.00K |
| 386 | MIR连接杆2.ipt | 727.00K |
| 387 | MIR连接架-驱动轮传动轴.ipt | 440.00K |
| 388 | MIR连接架-驱动轮传动轴2.ipt | 141.00K |
| 389 | MIR零件6.ipt | 333.50K |
| 390 | MIR零件8.ipt | 279.50K |
| 391 | MIR驱动轮-轴接.ipt | 404.00K |
| 392 | MIR驱动轮.iam | 461.50K |
| 393 | MIR驱动轮.ipt | 7.77M |
| 394 | MIR驱动轮轴承.ipt | 372.50K |
| 395 | MIR驱动轮轴承套.ipt | 129.50K |
| 396 | 合盖.ipt | 347.00K |
| 397 | 垫片AS1237-8.ipt | 105.50K |
| 398 | 导向轮.ipt | 592.00K |
| 399 | 导向轮轮法兰盘.ipt | 521.50K |
| 400 | 导向轮轴.ipt | 328.00K |
| 401 | 导向轮轴承.ipt | 211.50K |
| 402 | 导向轮轴承架.ipt | 182.50K |
| 403 | 导向轮轴承架套筒.ipt | 130.50K |
| 404 | 导向轮轴承架套筒2.ipt | 113.50K |
| 405 | 导向轮轴承架紧固螺帽.ipt | 353.00K |
| 406 | 履带3.ipt | 591.00K |
| 407 | 承重杆.ipt | 597.50K |
| 408 | 承重轮.ipt | 1.58M |
| 409 | 承重轮法兰.ipt | 153.00K |
| 410 | 承重轮轴.ipt | 167.00K |
| 411 | 承重轮轴承.ipt | 215.00K |
| 412 | 横杆.ipt | 1.09M |
| 413 | 螺母ANSIB18.2.4.2M-M5x0.8-8.ipt | 183.50K |
| 414 | 行走装置.iam | 1.61M |
| 415 | 轴承6006-ZGB_T276-94.ipt | 349.00K |
| 416 | 连接杆1.ipt | 307.00K |
| 417 | 连接杆2.ipt | 546.00K |
| 418 | 连接架-驱动轮传动轴.ipt | 406.50K |
| 419 | 连接架-驱动轮传动轴2.ipt | 150.50K |
| 420 | 零件6.ipt | 390.50K |
| 421 | 零件8.ipt | 309.00K |
| 422 | 驱动轮-轴接.ipt | 414.00K |
| 423 | 驱动轮.iam | 467.50K |
| 424 | 驱动轮.ipt | 4.78M |
| 425 | 驱动轮轴承.ipt | 322.00K |
| 426 | 驱动轮轴承套.ipt | 140.50K |
| 427 | AS1110-M5x10.0005.ipt | 200.50K |
| 428 | AS1110-M8x12.0003.ipt | 212.50K |
| 429 | ISO2491-A6x4x14.0003.ipt | 137.00K |
| 430 | MIRAS1110-M5x10.0002.ipt | 170.00K |
| 431 | MIRAS1110-M8x12.0002.ipt | 192.00K |
| 432 | MIRISO2491-A6x4x14.0002.ipt | 132.00K |
| 433 | MIR垫片AS1237-8.0002.ipt | 107.50K |
| 434 | MIR导向轮.0002.ipt | 557.00K |
| 435 | MIR导向轮轮法兰盘.0002.ipt | 484.00K |
| 436 | MIR导向轮轴.0002.ipt | 359.50K |
| 437 | MIR导向轮轴承.0002.ipt | 199.00K |
| 438 | MIR导向轮轴承架.0002.ipt | 122.00K |
| 439 | MIR导向轮轴承架套筒.0002.ipt | 113.00K |
| 440 | MIR导向轮轴承架套筒2.0002.ipt | 103.50K |
| 441 | MIR导向轮轴承架紧固螺帽.0002.ipt | 263.00K |
| 442 | MIR履带3.0002.ipt | 754.50K |
| 443 | MIR承重杆.0002.ipt | 503.50K |
| 444 | MIR承重轮.0002.ipt | 2.00M |
| 445 | MIR承重轮法兰.0002.ipt | 121.50K |
| 446 | MIR承重轮轴.0002.ipt | 118.00K |
| 447 | MIR承重轮轴承.0002.ipt | 202.50K |
| 448 | MIR横杆.0002.ipt | 802.00K |
| 449 | MIR螺母ANSIB18.2.4.2M-M5x0.8-8.0002.ipt | 176.00K |
| 450 | MIR行走装置.0006.iam | 377.50K |
| 451 | MIR轴承6006-ZGB_T276-94.0002.ipt | 337.50K |
| 452 | MIR连接杆1.0002.ipt | 241.00K |
| 453 | MIR连接杆2.0002.ipt | 700.50K |
| 454 | MIR连接架-驱动轮传动轴.0002.ipt | 439.50K |
| 455 | MIR连接架-驱动轮传动轴2.0002.ipt | 132.50K |
| 456 | MIR零件6.0002.ipt | 297.50K |
| 457 | MIR零件8.0002.ipt | 249.00K |
| 458 | MIR驱动轮-轴接.0002.ipt | 389.00K |
| 459 | MIR驱动轮.0002.iam | 68.50K |
| 460 | MIR驱动轮.0002.ipt | 7.72M |
| 461 | MIR驱动轮轴承.0002.ipt | 307.50K |
| 462 | MIR驱动轮轴承套.0002.ipt | 128.50K |
| 463 | 合盖.0013.ipt | 298.00K |
| 464 | 垫片AS1237-8.0002.ipt | 105.00K |
| 465 | 导向轮.0017.ipt | 553.50K |
| 466 | 导向轮轮法兰盘.0021.ipt | 498.00K |
| 467 | 导向轮轴.0007.ipt | 329.50K |
| 468 | 导向轮轴承.0003.ipt | 211.50K |
| 469 | 导向轮轴承架.0006.ipt | 141.50K |
| 470 | 导向轮轴承架套筒.0004.ipt | 121.00K |
| 471 | 导向轮轴承架套筒2.0003.ipt | 110.00K |
| 472 | 导向轮轴承架紧固螺帽.0004.ipt | 286.50K |
| 473 | 履带3.0003.ipt | 583.50K |
| 474 | 承重杆.0034.ipt | 592.50K |
| 475 | 承重轮.0007.ipt | 1.54M |
| 476 | 承重轮法兰.0009.ipt | 145.50K |
| 477 | 承重轮轴.0015.ipt | 165.50K |
| 478 | 承重轮轴承.0003.ipt | 215.50K |
| 479 | 横杆.0062.ipt | 1.08M |
| 480 | 螺母ANSIB18.2.4.2M-M5x0.8-8.0003.ipt | 183.00K |
| 481 | 行走装置.0127.iam | 2.49M |
| 482 | 轴承6006-ZGB_T276-94.0003.ipt | 348.50K |
| 483 | 连接杆1.0010.ipt | 272.50K |
| 484 | 连接杆2.0007.ipt | 521.00K |
| 485 | 连接架-驱动轮传动轴.0008.ipt | 386.50K |
| 486 | 连接架-驱动轮传动轴2.0006.ipt | 143.00K |
| 487 | 零件6.0018.ipt | 356.00K |
| 488 | 零件8.0016.ipt | 280.00K |
| 489 | 驱动轮-轴接.0008.ipt | 382.00K |
| 490 | 驱动轮.0011.iam | 69.50K |
| 491 | 驱动轮.0017.ipt | 4.73M |
| 492 | 驱动轮轴承.0003.ipt | 321.50K |
| 493 | 驱动轮轴承套.0013.ipt | 140.50K |
| 494 | MIR上挡环1.ipt | 140.50K |
| 495 | MIR下挡环1.ipt | 186.00K |
| 496 | MIR减震器1.iam | 512.00K |
| 497 | MIR减震弹簧1.ipt | 309.50K |
| 498 | MIR子装配-上1.iam | 150.50K |
| 499 | MIR子装配-下1.iam | 156.50K |
| 500 | MIR连接轴1.ipt | 166.50K |
| 501 | MIR限位轴1.ipt | 115.50K |
| 502 | MIR驱动轴1.ipt | 202.00K |
| 503 | 上挡环.ipt | 147.00K |
| 504 | 下挡环.ipt | 190.00K |
| 505 | 减震器.iam | 515.00K |
| 506 | 减震弹簧.ipt | 303.50K |
| 507 | 子装配-上.iam | 155.00K |
| 508 | 子装配-下.iam | 157.50K |
| 509 | 连接轴.ipt | 203.00K |
| 510 | 限位轴.ipt | 121.50K |
| 511 | 驱动轴.ipt | 236.50K |
| 512 | MIR上挡环1.0002.ipt | 100.00K |
| 513 | MIR下挡环1.0002.ipt | 149.50K |
| 514 | MIR减震器1.0002.iam | 76.00K |
| 515 | MIR减震弹簧1.0002.ipt | 287.00K |
| 516 | MIR子装配-上1.0002.iam | 73.50K |
| 517 | MIR子装配-下1.0002.iam | 68.50K |
| 518 | MIR连接轴1.0002.ipt | 154.50K |
| 519 | MIR限位轴1.0002.ipt | 70.50K |
| 520 | MIR驱动轴1.0002.ipt | 183.50K |
| 521 | 上挡环.0005.ipt | 107.50K |
| 522 | 下挡环.0005.ipt | 154.50K |
| 523 | 减震器.0014.iam | 78.50K |
| 524 | 减震弹簧.0006.ipt | 282.00K |
| 525 | 子装配-上.0011.iam | 74.50K |
| 526 | 子装配-下.0014.iam | 70.00K |
| 527 | 连接轴.0016.ipt | 191.50K |
| 528 | 限位轴.0005.ipt | 75.00K |
| 529 | 驱动轴.0009.ipt | 220.00K |
| 530 | MIR键联接21.iam | 177.00K |
| 531 | 键联接2.iam | 164.00K |
| 532 | MIR键联接21.0002.iam | 67.50K |
| 533 | 键联接2.0007.iam | 54.50K |
| 534 | 电机.ipt | 363.00K |
| 535 | 电机.0012.ipt | 340.00K |
| 536 | AS1110-M5x10.ipt | 190.50K |
| 537 | AS1474-M51.ipt | 123.00K |
| 538 | GB_T1096-A5x5x10.ipt | 132.00K |
| 539 | RollingbearingGB_T5800-2003-61000.ipt | 211.50K |
| 540 | RollingbearingGB_T5800-2003-61900.ipt | 207.00K |
| 541 | RollingbearingGB_T5800-2003-638_8.ipt | 221.50K |
| 542 | 减速轴.ipt | 117.00K |
| 543 | 刹车架.ipt | 243.50K |
| 544 | 控制柜.ipt | 1.40M |
| 545 | 摄像头.ipt | 480.00K |
| 546 | 支架.ipt | 1.02M |
| 547 | 电池.ipt | 544.00K |
| 548 | 电磁铁.ipt | 419.50K |
| 549 | 转向转轴1.ipt | 110.00K |
| 550 | 转向转轴2.ipt | 113.50K |
| 551 | 转向轴3.ipt | 117.50K |
| 552 | 转轴1.ipt | 288.00K |
| 553 | 转轴1支架.ipt | 1.09M |
| 554 | 轴承61802-2LSGB_T276-94.ipt | 344.50K |
| 555 | 齿轮组.iam | 1.79M |
| 556 | AS1110-M5x10.0001.ipt | 190.50K |
| 557 | AS1474-M51.0001.ipt | 122.50K |
| 558 | GB_T1096-A5x5x10.0001.ipt | 131.50K |
| 559 | RollingbearingGB_T5800-2003-61000.0001.ipt | 210.50K |
| 560 | RollingbearingGB_T5800-2003-61900.0001.ipt | 206.00K |
| 561 | RollingbearingGB_T5800-2003-638_8.0001.ipt | 221.00K |
| 562 | 减速轴.0003.ipt | 111.00K |
| 563 | 刹车架.0007.ipt | 243.00K |
| 564 | 控制柜.0007.ipt | 1.32M |
| 565 | 摄像头.0004.ipt | 473.00K |
| 566 | 支架.0024.ipt | 1.00M |
| 567 | 电池.0006.ipt | 521.50K |
| 568 | 电磁铁.0003.ipt | 405.00K |
| 569 | 转向转轴1.0004.ipt | 109.50K |
| 570 | 转向转轴2.0004.ipt | 113.50K |
| 571 | 转向轴3.0005.ipt | 116.50K |
| 572 | 转轴1.0006.ipt | 266.50K |
| 573 | 转轴1支架.0017.ipt | 1.07M |
| 574 | 轴承61802-2LSGB_T276-94.0001.ipt | 344.00K |
| 575 | 齿轮组.0074.iam | 1.93M |
| 576 | 正齿轮1.iam | 247.50K |
| 577 | 正齿轮11.ipt | 511.00K |
| 578 | 正齿轮12.ipt | 478.50K |
| 579 | 正齿轮13.ipt | 885.50K |
| 580 | 正齿轮2.iam | 342.00K |
| 581 | 正齿轮21.ipt | 875.00K |
| 582 | 正齿轮22.ipt | 1.65M |
| 583 | 正齿轮23.ipt | 900.50K |
| 584 | 正齿轮3.iam | 290.00K |
| 585 | 锥齿轮1.iam | 170.00K |
| 586 | 锥齿轮11.ipt | 555.00K |
| 587 | 锥齿轮14.ipt | 910.50K |
| 588 | 锥齿轮21.ipt | 555.00K |
| 589 | 锥齿轮24.ipt | 1.15M |
| 590 | 键联接1.iam | 177.50K |
| 591 | 正齿轮1.0005.iam | 66.50K |
| 592 | 正齿轮11.0003.ipt | 432.00K |
| 593 | 正齿轮12.0002.ipt | 370.50K |
| 594 | 正齿轮13.0002.ipt | 837.00K |
| 595 | 正齿轮2.0005.iam | 66.50K |
| 596 | 正齿轮21.0003.ipt | 819.50K |
| 597 | 正齿轮22.0003.ipt | 1.59M |
| 598 | 正齿轮23.0003.ipt | 873.00K |
| 599 | 正齿轮3.0006.iam | 89.00K |
| 600 | 锥齿轮1.0004.iam | 57.50K |
| 601 | 锥齿轮11.0002.ipt | 551.00K |
| 602 | 锥齿轮14.0004.ipt | 908.50K |
| 603 | 锥齿轮21.0002.ipt | 551.50K |
| 604 | 锥齿轮24.0006.ipt | 1.14M |
| 605 | 键联接1.0005.iam | 54.50K |
此图纸下载需要120金币
立即下载
发布者
火星上的冷风
创作: 319
粉丝: 22
加入时间:2023-05-25

模型信息
图纸ID:1371243
图纸格式:ipt,dwg,iam
文件大小:174.28M
所需金币:120
上传时间:2024-05-11 17:29:03
是否可编辑:可修改,包括参数
软件版本:Inventor 2017
标签
图纸简介
总装配文件:\Workspaces\Workspace\zz1.iam
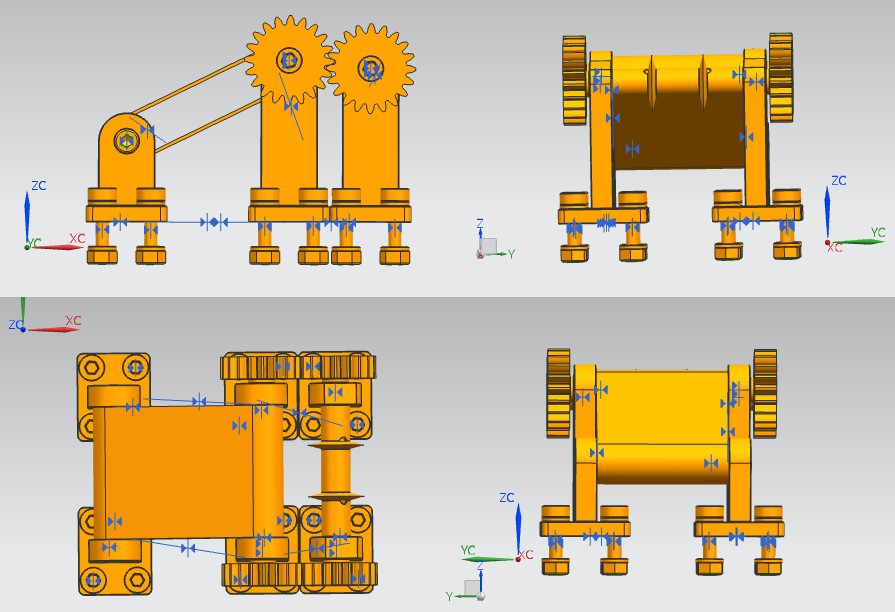
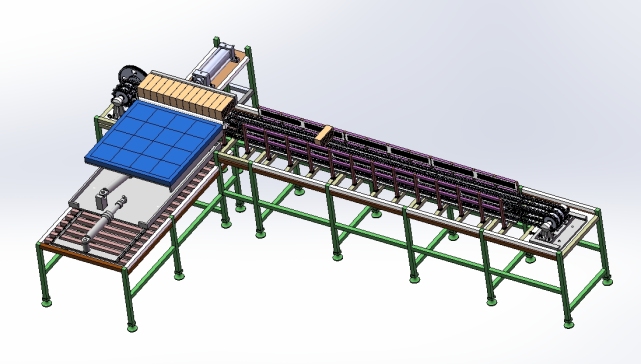
本设备在保证高效运行的同时,结合同类产品的优点,增加了对不同环境的适应度,大大提高了性能。履带轮可以在复杂路面行进;差速器的使用可以节约电机数量,减少成本;采用关节型结构,使机器人动作灵活,结构紧凑,占地面积小;并联式机械手臂保证运动的高精度;可更换机械抓手有真空吸附式和外夹式两种模式,既可以用于箱式物件也可以抓取袋状包装;采用电机驱动控制反应更灵敏,可实现高速、高精度的连续轨迹控制。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。




0.jpg)
0.png)
0.jpg)
0.png)
0.jpg)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

