
登录注册
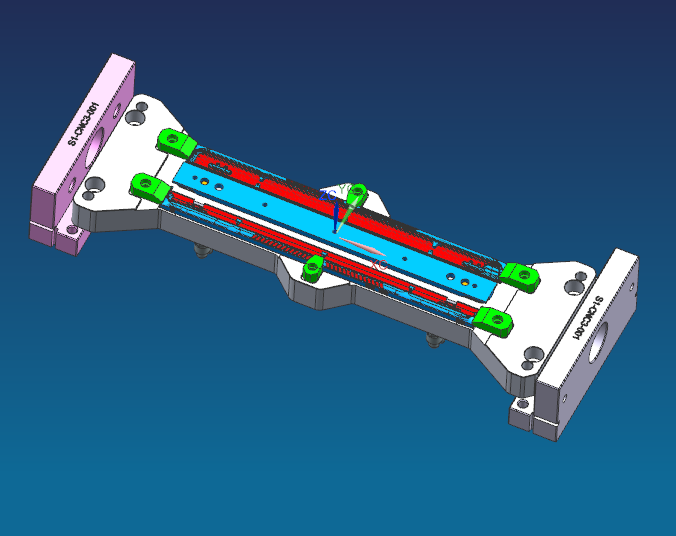
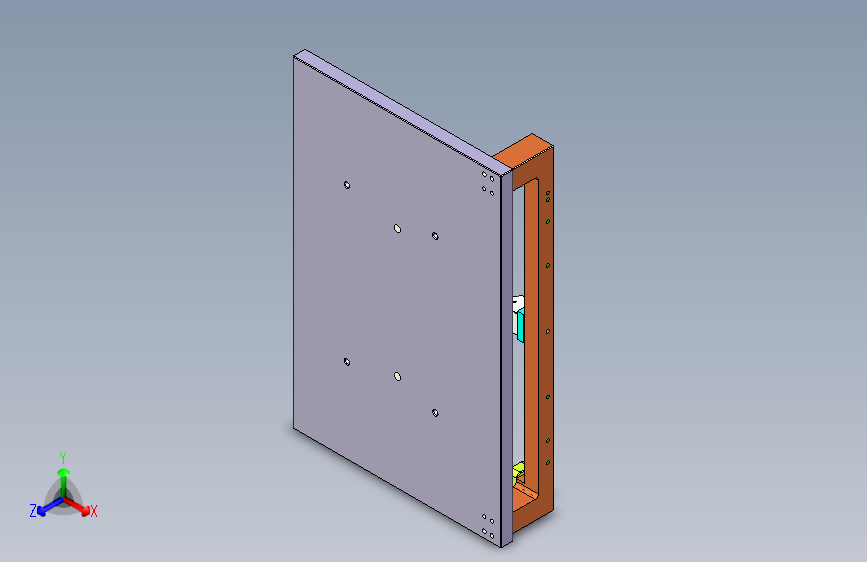
平行四边形四自由度机械手设计与分析含仿真三维二维说明书(ID:1435262)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17174207925353.zip | 21.00M |
| 2 | DABI.mp4 | 106.62K |
| 3 | DIZUO.mp4 | 399.19K |
| 4 | XIAOBI.mp4 | 229.77K |
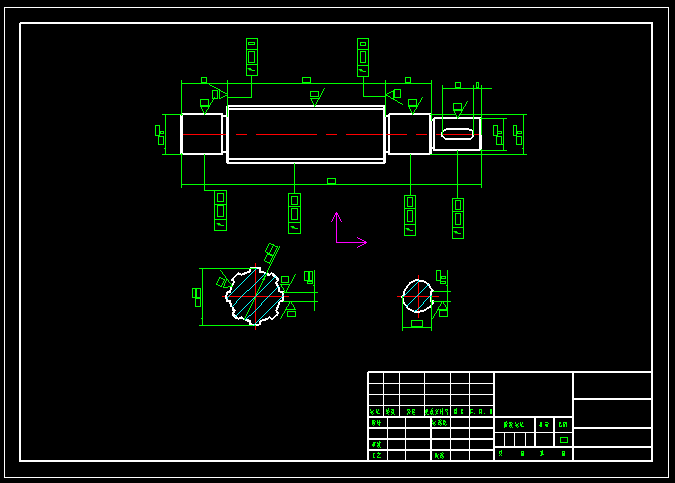
| 5 | 1四自由度平行四边形机械手装配图.dwg | 505.78K |
| 6 | 2底座零件图.dwg | 80.70K |
| 7 | 3大臂左侧板零件图.dwg | 98.78K |
| 8 | 4小臂侧板零件图.dwg | 71.26K |
| 9 | 5左连接杆零件图.dwg | 64.66K |
| 10 | GB818-M3X12-ZN-4.8.SLDPRT | 244.00K |
| 11 | GB818-M3X14-ZN-4.8.SLDPRT | 245.50K |
| 12 | GB818-M3X6-ZN-4.8.SLDPRT | 195.50K |
| 13 | 伺服电机.SLDPRT | 488.00K |
| 14 | 伺服电机轴.SLDPRT | 154.00K |
| 15 | 右支撑板.SLDPRT | 266.00K |
| 16 | 右连接杆.SLDPRT | 191.00K |
| 17 | 四自由度平行四边形机械手.SLDASM | 2.92M |
| 18 | 固定片.SLDPRT | 183.50K |
| 19 | 固定螺钉.SLDPRT | 236.50K |
| 20 | 圆锥滚子轴承.SLDPRT | 461.00K |
| 21 | 基座.SLDPRT | 239.50K |
| 22 | 大臂.SLDPRT | 160.00K |
| 23 | 大臂固定杆.SLDPRT | 259.50K |
| 24 | 大臂轴承端挡板.SLDPRT | 275.50K |
| 25 | 大臂连接杆.SLDPRT | 283.00K |
| 26 | 小垫片.SLDPRT | 166.50K |
| 27 | 小横杆.SLDPRT | 196.50K |
| 28 | 小臂.SLDPRT | 370.00K |
| 29 | 小臂固定杆.SLDPRT | 269.50K |
| 30 | 小臂连接杆.SLDPRT | 291.00K |
| 31 | 小舵机.SLDPRT | 386.00K |
| 32 | 小轴承.SLDPRT | 694.00K |
| 33 | 左支撑板.SLDPRT | 269.00K |
| 34 | 左连接杆.SLDPRT | 219.50K |
| 35 | 底座.SLDPRT | 190.00K |
| 36 | 底座(上).SLDPRT | 278.50K |
| 37 | 底盘.SLDPRT | 625.50K |
| 38 | 扇形齿轮.SLDPRT | 417.00K |
| 39 | 扇形齿轮2.SLDPRT | 426.50K |
| 40 | 手掌.SLDPRT | 417.50K |
| 41 | 支撑板固定杆.SLDPRT | 256.00K |
| 42 | 末端机械手.SLDASM | 600.00K |
| 43 | 舵机.SLDPRT | 355.50K |
| 44 | 舵机支撑盒.SLDPRT | 293.00K |
| 45 | 螺柱.SLDPRT | 161.00K |
| 46 | 螺母M3.SLDPRT | 148.00K |
| 47 | 轴.SLDPRT | 150.00K |
| 48 | 轴套.SLDPRT | 253.00K |
| 49 | 轴承.SLDPRT | 911.00K |
| 50 | 轴承端盖右.SLDPRT | 184.50K |
| 51 | 轴承端盖左.SLDPRT | 160.50K |
| 52 | 连接杆固定杆.SLDPRT | 267.50K |
| 53 | 连架杆.SLDPRT | 165.50K |
| 54 | 长杆.SLDPRT | 259.00K |
| 55 | 四自由度平行四边形机械手设计与分析.doc | 2.83M |
| 56 | 四自由度平行四边形机械手运动仿真.mp4 | 7.21M |
| 57 | 末端执行器运动仿真.mp4 | 3.15M |
此图纸下载需要1000金币
立即下载
发布者
懵懂的帽子
创作: 15797
粉丝: 136
加入时间:2023-06-06
模型信息
图纸格式:dwg,sldprt,sldasm
文件大小:21.5M
所需金币:1000
上传时间:2024-06-03 21:19:57
是否可编辑:可修改,包括参数
版本:SOLIDWORKS
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

