
登录注册
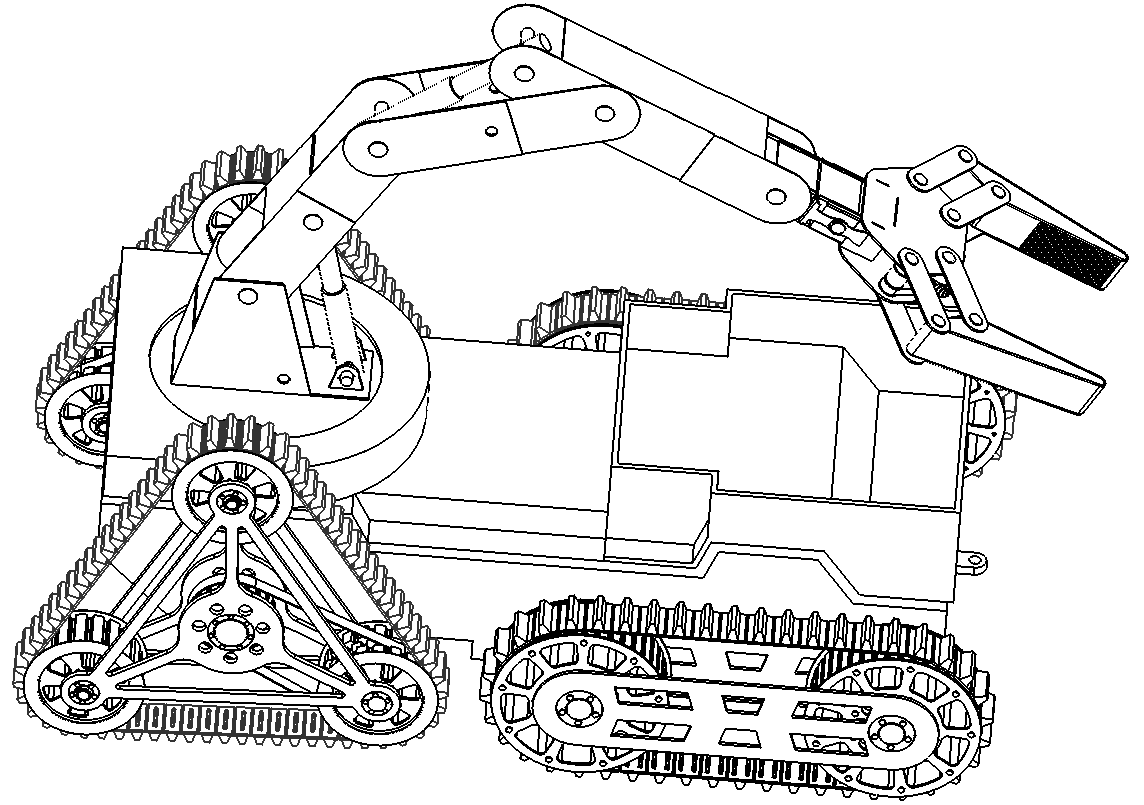
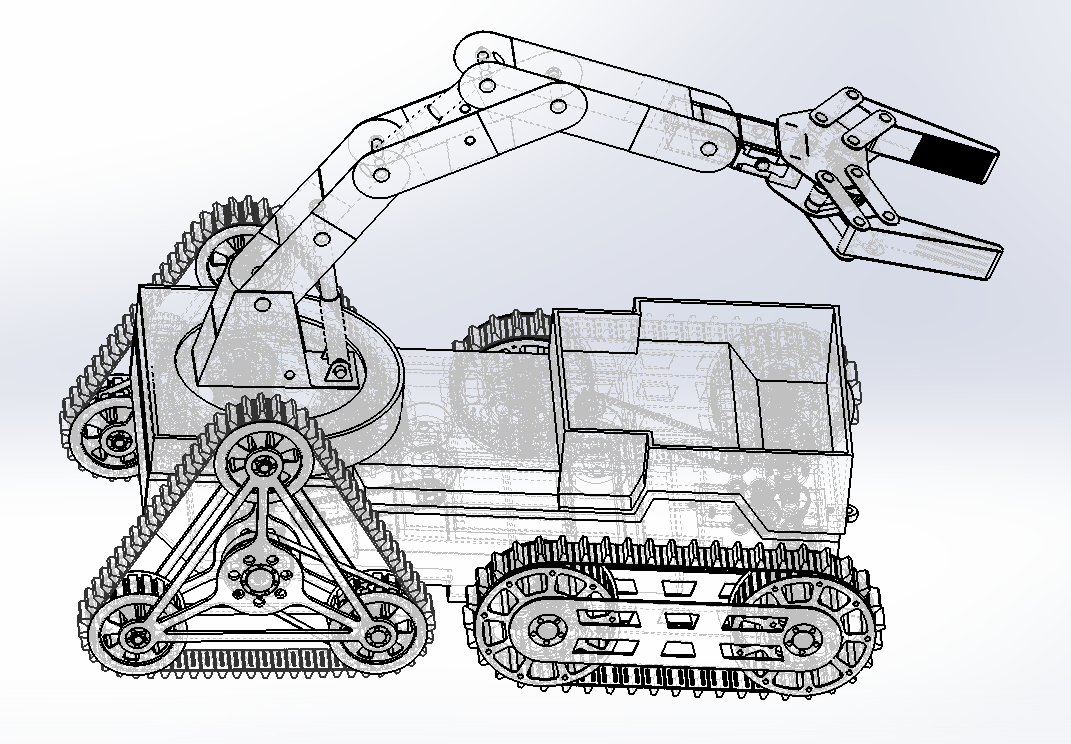
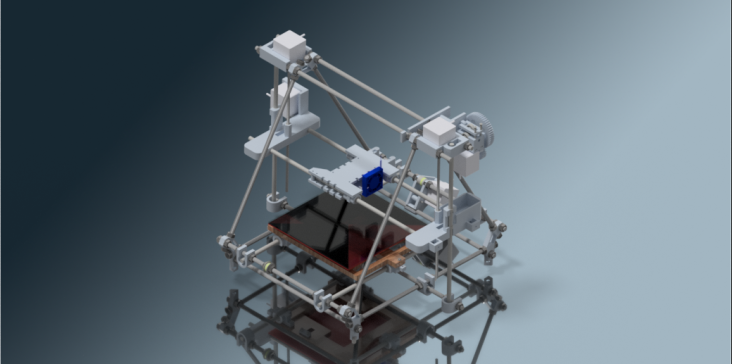
履带式救援机器人(ID:1443501)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17177582615868.zip | 168.91M |
| 2 | 1毕业设计封面.pdf | 155.05K |
| 3 | 2毕业设计正文-编排模版参考格式理工科类.pdf | 2.81M |
| 4 | 1毕业设计封面.docx | 96.02K |
| 5 | 2毕业设计正文-编排模版参考格式理工科类.docx | 6.65M |
| 6 | 业设计说明书.docx | 162B |
| 7 | 三角盘A3-模型.pdf | 76.38K |
| 8 | 三角驱动齿轮A3-模型.pdf | 108.10K |
| 9 | 减速期装配体(完美配合版)A1-模型.pdf | 97.90K |
| 10 | 后轮板A3-模型.pdf | 100.72K |
| 11 | 套筒(机械臂)A3-模型.pdf | 66.07K |
| 12 | 好神支架A3-模型.pdf | 98.29K |
| 13 | 总装配体A0-模型.pdf | 303.27K |
| 14 | 机械手臂杆a2-模型.pdf | 83.51K |
| 15 | 机械抓手(a2)-模型.pdf | 138.83K |
| 16 | 车壳子2A3-模型.pdf | 100.36K |
| 17 | 车架(A3)-模型.pdf | 98.89K |
| 18 | 轮毂(后轮)-模型.pdf | 117.23K |
| 19 | 轮盘2(后轮板)(A3)-模型.pdf | 111.02K |
| 20 | 轮盘(无花键)A3-模型.pdf | 71.49K |
| 21 | 轴套(三角轮)A3-模型.pdf | 99.45K |
| 22 | 传送带.SLDPRT | 79.33K |
| 23 | 侧板1.SLDPRT | 211.08K |
| 24 | 侧板2.2.SLDPRT | 190.34K |
| 25 | 侧板2.SLDPRT | 120.56K |
| 26 | 后背板.SLDPRT | 72.87K |
| 27 | 后顶板1.SLDPRT | 61.81K |
| 28 | 回转垫片.SLDPRT | 138.91K |
| 29 | 开放式深沟球轴承[GB6201](后轮轴承).step | 27.85K |
| 30 | 弹簧垫圈SPWA[SPWA-3]d3s0.8t0.8.step | 21.03K |
| 31 | 总电池.SLDPRT | 73.14K |
| 32 | 法兰(后轮轴用).SLDPRT | 108.66K |
| 33 | 法兰(后轮轴用)(短版).SLDPRT | 108.82K |
| 34 | 法兰(后轮轴用)(超短版).SLDPRT | 109.90K |
| 35 | 法兰(短板promax).SLDPRT | 100.79K |
| 36 | 盒子.SLDPRT | 64.29K |
| 37 | 箱子(总).SLDPRT | 218.59K |
| 38 | 联轴器(凸).SLDPRT | 120.09K |
| 39 | 联轴器(凹).SLDPRT | 129.15K |
| 40 | 车壳子.SLDPRT | 59.57K |
| 41 | 车壳子2.SLDPRT | 204.99K |
| 42 | 车架.SLDPRT | 534.53K |
| 43 | 轴1.SLDPRT | 82.79K |
| 44 | 轴承(后轮轴用).SLDPRT | 131.79K |
| 45 | 键(l10--r1.5).SLDPRT | 73.83K |
| 46 | 三角盘.SLDPRT | 356.77K |
| 47 | 三角轮-副本.SLDPRT | 318.43K |
| 48 | 三角轮.SLDPRT | 387.80K |
| 49 | 三角轮传送带.SLDPRT | 85.98K |
| 50 | 三角轮小轴.SLDPRT | 75.46K |
| 51 | 三角轮履带2.SLDPRT | 84.76K |
| 52 | 三角轮装配体.SLDASM | 496.01K |
| 53 | 三角轮装配体(完全配合版).SLDASM | 765.25K |
| 54 | 三角轮轮盘.SLDPRT | 173.48K |
| 55 | 三角轮驱动轮.SLDPRT | 802.04K |
| 56 | 三角驱动履带.SLDPRT | 84.76K |
| 57 | 三角驱动齿轮.SLDPRT | 526.07K |
| 58 | 履带.SLDPRT | 81.88K |
| 59 | 履带3.SLDPRT | 86.80K |
| 60 | 履带(好)).SLDPRT | 73.06K |
| 61 | 挡环(三角轮边轮轴用).SLDPRT | 78.10K |
| 62 | 挡环(中间轴).SLDPRT | 102.11K |
| 63 | 端盖(三角轮边轮).SLDPRT | 118.96K |
| 64 | 端盖(中间轴).SLDPRT | 117.66K |
| 65 | 端盖(中间轴)(有孔).SLDPRT | 123.64K |
| 66 | 轮盘固定环(三角轮).SLDPRT | 99.81K |
| 67 | 轴2.SLDPRT | 184.23K |
| 68 | 轴套1(三角轮).SLDPRT | 96.90K |
| 69 | 轴套(三角轮).SLDPRT | 106.42K |
| 70 | 轴承1(三角轮轴用).SLDPRT | 136.81K |
| 71 | 轴承(三角中间轴).SLDPRT | 95.28K |
| 72 | 轴承(三角轮).SLDPRT | 100.81K |
| 73 | 轴(三角轮边轮).SLDPRT | 138.08K |
| 74 | 弹簧垫圈SPWA[SPWA-3]d3s0.8t0.8.SLDPRT | 146.28K |
| 75 | 螺栓d1.6s2k0.5l2.SLDPRT | 398.62K |
| 76 | 螺栓d2l3.SLDPRT | 382.98K |
| 77 | 螺栓d2l5.SLDPRT | 646.81K |
| 78 | 螺栓d3k2l12s5.5.SLDPRT | 901.13K |
| 79 | 螺栓d3k2l6s5.5.SLDPRT | 548.14K |
| 80 | 螺栓d3l3.SLDPRT | 602.97K |
| 81 | 螺栓d3l4.SLDPRT | 681.44K |
| 82 | 螺栓d3l5.SLDPRT | 726.82K |
| 83 | 螺栓d4l3.SLDPRT | 573.73K |
| 84 | 螺栓d4l6.SLDPRT | 857.37K |
| 85 | 螺栓d5l30k2.SLDPRT | 1.32M |
| 86 | 螺栓d6k4l26.SLDPRT | 1.27M |
| 87 | 螺栓d8k4s13l30.SLDPRT | 1.70M |
| 88 | 螺母d1.6.SLDPRT | 192.85K |
| 89 | 螺母d2k0.5.SLDPRT | 223.84K |
| 90 | 螺母d3k1.SLDPRT | 266.32K |
| 91 | 螺母d3k2s5.5.SLDPRT | 338.66K |
| 92 | 螺母d3k2s5.5(减速去).SLDPRT | 373.00K |
| 93 | 螺母d4k1.SLDPRT | 271.42K |
| 94 | 螺母d5k2.SLDPRT | 467.33K |
| 95 | 螺母d6k4.SLDPRT | 829.26K |
| 96 | 螺母d8k4.SLDPRT | 681.97K |
| 97 | SW工程图转CAD完美解决方法.doc | 376.50K |
| 98 | SW转CAD图层映射.txt | 1.57K |
| 99 | 三角盘.SLDDRW | 146.63K |
| 100 | 后轮板.SLDDRW | 109.04K |
| 101 | 后轮轮盘.SLDDRW | 136.89K |
| 102 | 中间轴.SLDPRT | 105.76K |
| 103 | 减速期装配体.SLDASM | 495.53K |
| 104 | 减速期装配体(完美配合版).SLDASM | 538.42K |
| 105 | 大齿轮.SLDPRT | 339.28K |
| 106 | 大齿轮2.SLDPRT | 249.19K |
| 107 | 套筒1(输入轴).SLDPRT | 90.53K |
| 108 | 套筒2(输出轴).SLDPRT | 91.10K |
| 109 | 套筒(右).SLDPRT | 94.67K |
| 110 | 套筒(左).SLDPRT | 94.01K |
| 111 | 套筒(输出轴).SLDPRT | 115.28K |
| 112 | 定时开机好贵啊我好烦.SLDPRT | 255.45K |
| 113 | 小齿轮.SLDPRT | 162.25K |
| 114 | 小齿轮2.SLDPRT | 164.63K |
| 115 | 端盖3(中间轴).SLDPRT | 98.23K |
| 116 | 端盖(输入轴).SLDPRT | 93.38K |
| 117 | 箱体(定位版).SLDPRT | 306.24K |
| 118 | 箱盖.SLDPRT | 260.94K |
| 119 | 背板.SLDPRT | 227.60K |
| 120 | 轮2.SLDPRT | 447.81K |
| 121 | 轴1.SLDPRT | 93.82K |
| 122 | 轴承1(输入轴).SLDPRT | 107.29K |
| 123 | 轴承2(中间轴).SLDPRT | 108.20K |
| 124 | 轴承3(输出轴).SLDPRT | 106.41K |
| 125 | 轴环1(输入轴用).SLDPRT | 73.89K |
| 126 | 轴环2(输出轴用).SLDPRT | 74.85K |
| 127 | 轴环3(中间轴用).SLDPRT | 75.00K |
| 128 | 输入轴.SLDASM | 97.91K |
| 129 | 输出轴.SLDPRT | 111.59K |
| 130 | 键(l3--r1.5).SLDPRT | 77.12K |
| 131 | 齿轮1.SLDPRT | 619.30K |
| 132 | GB╱T894.1-1986[Q431轴用弹性挡圈Q43105F3](输入轴用).sldasm | 33.54K |
| 133 | GB╱T894.1-1986[Q431轴用弹性挡圈Q43105F3](输入轴用)_轴用弹性挡圈d0<10.sldprt | 101.84K |
| 134 | 轴用弹性挡圈d0≥10.sldprt | 595.50K |
| 135 | 轴用弹性挡圈d0<10.SLDPRT | 102.31K |
| 136 | GB╱T894.1-1986[Q431轴用弹性挡圈Q43110F3](输入轴用).sldasm | 73.92K |
| 137 | GB╱T894.1-1986[Q431轴用弹性挡圈Q43110F3](输入轴用)_轴用弹性挡圈d0≥10.sldprt | 94.81K |
| 138 | 轴用弹性挡圈d0≥10.sldprt | 103.07K |
| 139 | 轴用弹性挡圈d0<10.SLDPRT | 265.50K |
| 140 | 从动轮轴(后轮).SLDPRT | 72.95K |
| 141 | 后轮从动轴.SLDPRT | 66.66K |
| 142 | 后轮小轴.SLDPRT | 78.04K |
| 143 | 后轮履带(装配体).SLDASM | 129.90K |
| 144 | 后轮板.SLDPRT | 198.81K |
| 145 | 后轮装配体1(右轮)(完美配合版).SLDASM | 690.02K |
| 146 | 后轮装配体1(左轮)(完美配合版).SLDASM | 696.43K |
| 147 | 后轮装配体(右轮).SLDASM | 218.41K |
| 148 | 后轮装配体(左轮).SLDASM | 685.58K |
| 149 | 后轮轮齿.SLDPRT | 118.36K |
| 150 | 后轮轴2.SLDPRT | 197.94K |
| 151 | 垫片.SLDPRT | 89.81K |
| 152 | 套筒.SLDPRT | 105.88K |
| 153 | 端盖.SLDPRT | 106.80K |
| 154 | 车轮轴(后轮).SLDPRT | 165.46K |
| 155 | 轮毂(后轮).SLDPRT | 551.72K |
| 156 | 轮盘.SLDPRT | 286.08K |
| 157 | 轮盘1.SLDPRT | 140.31K |
| 158 | 轮盘2.SLDPRT | 227.70K |
| 159 | 轮盘(无花键).SLDPRT | 144.65K |
| 160 | 轴1-1.SLDPRT | 217.47K |
| 161 | 轴承.SLDPRT | 104.79K |
| 162 | 轴承(后轮从动轴).SLDPRT | 145.22K |
| 163 | 内圈.SLDPRT | 201.26K |
| 164 | 回转体(滚子).SLDPRT | 126.65K |
| 165 | 回转轴承.SLDASM | 401.82K |
| 166 | 外圈1.SLDPRT | 762.64K |
| 167 | QQ截图20240427120010.png | 143.83K |
| 168 | QQ截图20240427120028.png | 157.01K |
| 169 | QQ截图20240427120051.png | 107.07K |
| 170 | QQ截图20240427120106.png | 173.77K |
| 171 | QQ截图20240427120123.png | 148.83K |
| 172 | QQ截图20240427120205.png | 107.37K |
| 173 | QQ截图20240501144213.png | 57.28K |
| 174 | 三家轮轮履带.SLDPRT | 64.99K |
| 175 | 三角论履带.SLDASM | 137.25K |
| 176 | 三角轮轮齿.SLDPRT | 117.87K |
| 177 | 传送带1.SLDASM | 134.45K |
| 178 | 传送带2.SLDASM | 137.28K |
| 179 | 传送齿.SLDPRT | 94.49K |
| 180 | 后轮履带(装配体).SLDASM | 130.18K |
| 181 | 后轮轮齿.SLDPRT | 117.02K |
| 182 | 履带痴儿.SLDPRT | 100.65K |
| 183 | 传送带.SLDPRT | 85.23K |
| 184 | 回转电机齿轮.SLDPRT | 150.29K |
| 185 | 回转轴承电机.SLDPRT | 85.38K |
| 186 | 回转轴承电机轴.SLDPRT | 78.31K |
| 187 | 回转轴承电机(装配体).SLDASM | 90.09K |
| 188 | 垫片(机械臂用).SLDPRT | 77.54K |
| 189 | 壳子.SLDPRT | 163.72K |
| 190 | 壳子1.SLDPRT | 123.20K |
| 191 | 套筒(机械臂).SLDPRT | 145.46K |
| 192 | 好神支架.SLDPRT | 138.91K |
| 193 | 底座1.SLDPRT | 164.04K |
| 194 | 手指.SLDPRT | 106.95K |
| 195 | 搓衣板.SLDPRT | 138.57K |
| 196 | 机械手张佩提.SLDASM | 1.34M |
| 197 | 机械手臂杆.SLDASM | 335.44K |
| 198 | 机械抓手.SLDASM | 1.26M |
| 199 | 机械臂装配体.SLDASM | 151.11K |
| 200 | 液压座.SLDPRT | 104.33K |
| 201 | 液压柱.SLDPRT | 88.13K |
| 202 | 盒子.SLDPRT | 152.96K |
| 203 | 臂2.SLDPRT | 234.02K |
| 204 | 臂3.SLDPRT | 152.96K |
| 205 | 舵机.SLDPRT | 154.89K |
| 206 | 舵机小转盘.SLDPRT | 94.58K |
| 207 | 舵机装配一.SLDASM | 183.15K |
| 208 | 舵机轴.SLDPRT | 78.63K |
| 209 | 蜗杆1×1.25.SLDPRT | 466.52K |
| 210 | 蜗轮28×1.25.SLDPRT | 1.94M |
| 211 | 蜗轮28×1.251.SLDPRT | 927.42K |
| 212 | 转盘.SLDPRT | 104.04K |
| 213 | 轴.SLDPRT | 77.42K |
| 214 | 连接小片.SLDPRT | 79.57K |
| 215 | 连接销2.SLDPRT | 92.25K |
| 216 | 连接销3.SLDPRT | 89.10K |
| 217 | 链接销.SLDPRT | 101.17K |
| 218 | 链接销(机械臂连接用).SLDPRT | 100.34K |
| 219 | 销.SLDPRT | 95.43K |
| 220 | 销插.SLDPRT | 74.23K |
| 221 | 开放式深沟球轴承[GB6000].step | 27.86K |
| 222 | 深沟球轴承[6001E](三角轮边轮轴承).sldprt | 2.02M |
| 223 | 深沟球轴承[6080].sldprt | 2.66M |
| 224 | Nema17steppermotor.IGS | 2.23M |
| 225 | nema17steppermotor.PNG | 1.28M |
| 226 | Nema17steppermotor.SLDPRT | 548.97K |
| 227 | Nema17steppermotor.x_t | 486.40K |
| 228 | nema17steppermotor2.PNG | 1.75M |
| 229 | 外壳.SLDPRT | 187.92K |
| 230 | 定子.SLDPRT | 81.08K |
| 231 | 电机装配体.SLDASM | 183.78K |
| 232 | 盖子.SLDPRT | 136.90K |
| 233 | 转子.SLDPRT | 91.65K |
| 234 | 轴(驱动电机).SLDPRT | 92.26K |
| 235 | 齿轮.SLDPRT | 185.00K |
| 236 | qq截图20240422203408.p2m | 9.21K |
| 237 | QQ截图20240422203408.png | 7.26K |
| 238 | 车壳(不锈钢).p2m | 6.55K |
| 239 | 车壳(不锈钢).png | 4.62K |
| 240 | 车架(高强度钢板).p2m | 6.56K |
| 241 | 车架(高强度钢板).png | 5.54K |
| 242 | 三角论履带.SLDASM | 132.65K |
| 243 | 三角轮装配体(完全配合版).SLDASM | 2.78M |
| 244 | 减速期装配体(完美配合版).SLDASM | 572.16K |
| 245 | 后轮装配体1(右轮)(完美配合版).SLDASM | 2.61M |
| 246 | 后轮装配体1(左轮)(完美配合版).SLDASM | 2.13M |
| 247 | 总装配体.SLDASM | 15.89M |
| 248 | 电机装配体.SLDASM | 517.36K |
| 249 | 三角盘A3.DWG | 136.79K |
| 250 | 三角驱动齿轮A3.DWG | 135.07K |
| 251 | 减速期装配体(完美配合版)A1.DWG | 214.45K |
| 252 | 后轮板A3.DWG | 129.04K |
| 253 | 套筒(机械臂)A3.DWG | 118.41K |
| 254 | 好神支架A3.DWG | 124.50K |
| 255 | 总装配体A0.DWG | 1.07M |
| 256 | 机械手臂杆a2.DWG | 211.85K |
| 257 | 机械抓手(a2).DWG | 342.52K |
| 258 | 车壳子2A3.DWG | 134.44K |
| 259 | 车架(A3).DWG | 134.51K |
| 260 | 轮毂(后轮).DWG | 156.21K |
| 261 | 轮盘2(后轮板)(A3).DWG | 146.38K |
| 262 | 轮盘(无花键)A3.DWG | 124.82K |
| 263 | 轴套(三角轮)A3.DWG | 121.91K |
| 264 | ~$总装配体(A0).SLDDRW | 7B |
| 265 | 三角盘A3.SLDDRW | 196.50K |
| 266 | 三角驱动齿轮A3.SLDDRW | 216.13K |
| 267 | 减速期装配体(完美配合版)A1.SLDDRW | 541.95K |
| 268 | 后轮板.SLDDRW | 7B |
| 269 | 后轮板A3.SLDDRW | 146.75K |
| 270 | 套筒(机械臂)A3.SLDDRW | 137.75K |
| 271 | 好神支架A3.SLDDRW | 165.56K |
| 272 | 总装配体(A0).SLDDRW | 61.90M |
| 273 | 总装配体A0.SLDDRW | 4.94M |
| 274 | 机械手臂杆a2.SLDDRW | 300.85K |
| 275 | 机械抓手(a2).SLDDRW | 5.85M |
| 276 | 车壳子2.SLDDRW | 7B |
| 277 | 车壳子2A3.SLDDRW | 186.31K |
| 278 | 车架(A3).SLDDRW | 129.75K |
| 279 | 轮毂(后轮).SLDDRW | 273.00K |
| 280 | 轮盘2(后轮板).SLDDRW | 7B |
| 281 | 轮盘2(后轮板)(A3).SLDDRW | 199.16K |
| 282 | 轮盘(无花键)A3.SLDDRW | 163.56K |
| 283 | 轴套(三角轮).SLDDRW | 7B |
| 284 | 轴套(三角轮)A3.SLDDRW | 148.82K |
此图纸下载需要1500金币
立即下载
发布者
186****5798
创作: 1
粉丝: 0
加入时间:2024-06-07

模型信息
图纸格式:pdf,sldprt,step,sldasm,slddrw,igs,x_t,dwg
文件大小:172.97M
所需金币:1500
上传时间:2024-06-07 19:04:51
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2019
标签
履带
机器人
救援装备
机械臂
图纸简介
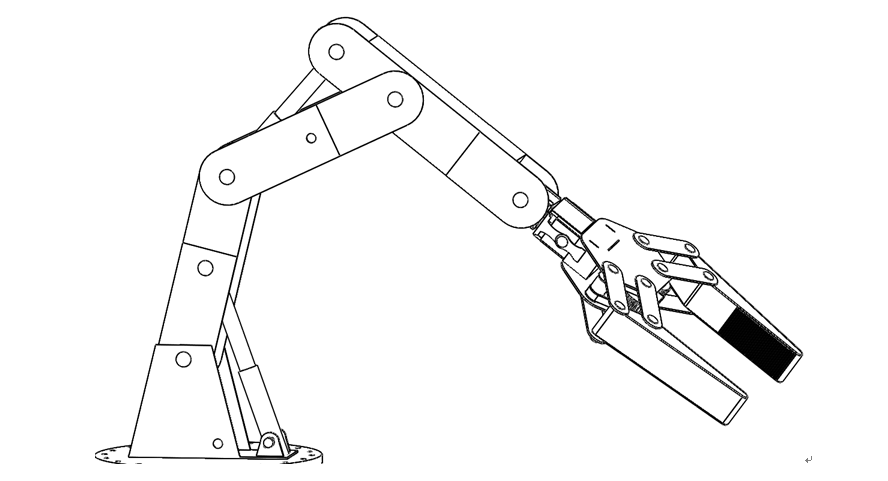
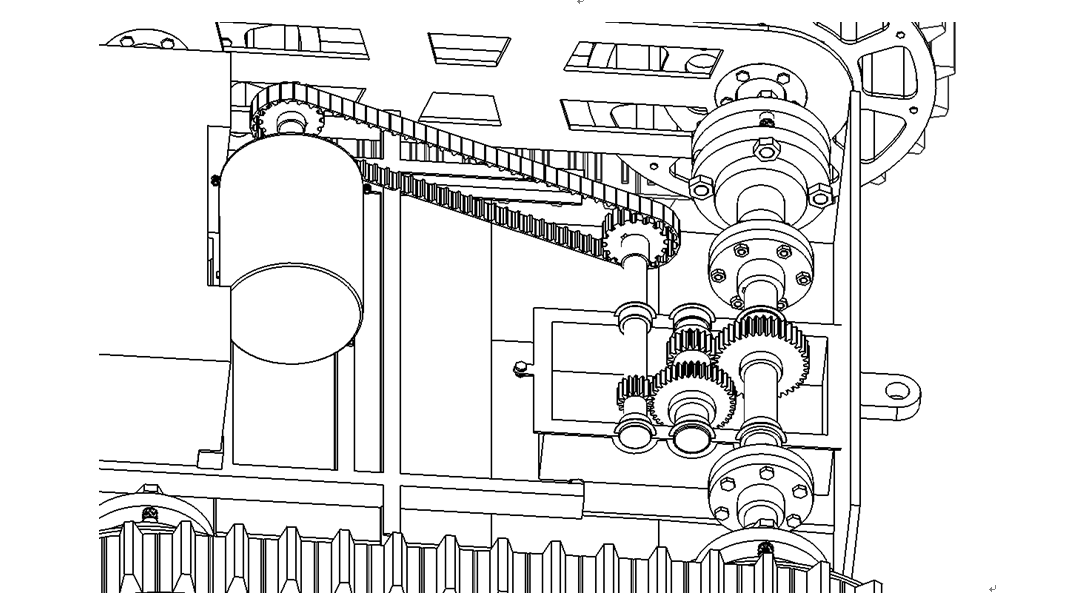
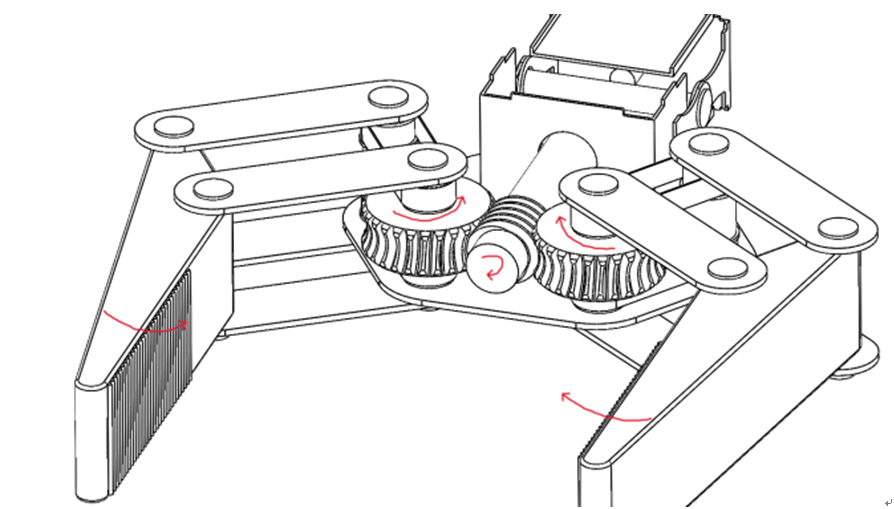
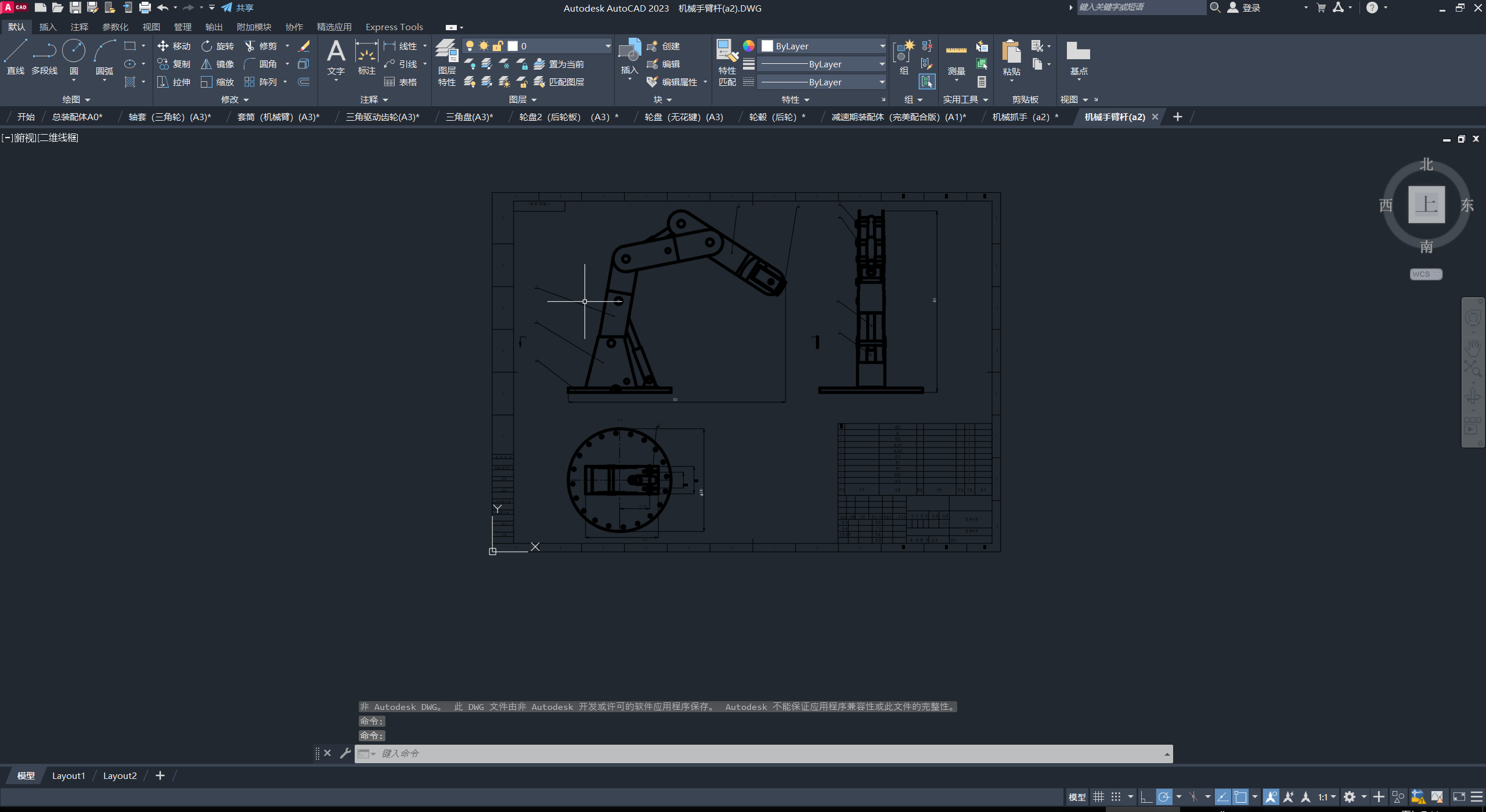
履带式救援机器人是一款适用于多种救灾情况的综合性救援装备。需要有较好的通过性,环境适应能力强,结构简单能够稳定工作和质量轻便于运输等特点。本设计装置由动力源、底盘装置、机械臂、转盘以及履带装置组成。该装置的动力源选择电机,由此提供动力,经过同步带传给减速器,再由联轴器转给行走装置,驱动车辆行驶。同时,机械臂由液压柱和电机控制,进行抓取任务。机械抓手伺服电机控制,由蜗轮蜗杆装置工作,带动机械手工作。转盘由电机提供动力,进行转动。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
猜你喜欢
0.jpg)
0_0_364.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)

