
登录注册
UG机械手工程车(ID:1468978)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17193257186264.zip | 4.81M |
| 2 | dof_nredun_motion_1-solution_2.minf | 11.57K |
| 3 | dof_nredun_zong_x_t-2_motion1-solution_1.minf | 72.76K |
| 4 | motion_1-solution_2.minp | 107.54K |
| 5 | motion_1.sim | 170.14K |
| 6 | movie.avi | 842.50K |
| 7 | UG大报告.docx | 12.42K |
| 8 | zong_x_t-2_motion1-solution_1.minp | 299.25K |
| 9 | zong_x_t-2_motion2-solution_1.minf | 90.36K |
| 10 | zong_x_t-2_motion2-solution_1.minp | 299.25K |
| 11 | zong_x_t-2_motion2-solution_1.mres | 306.80K |
| 12 | 丝杆.x_t | 2.91K |
| 13 | 丝杆_id6_x_t.prt | 73.50K |
| 14 | 丝杆_x_t.prt | 54.00K |
| 15 | 凸台.x_t | 9.46K |
| 16 | 凸台_x_t.prt | 85.50K |
| 17 | 前轮杆.prt | 125.00K |
| 18 | 剪刀固定滑块.prt | 165.00K |
| 19 | 剪刀固定滑块.x_t | 14.04K |
| 20 | 剪刀固定滑块_id6_x_t.prt | 87.00K |
| 21 | 剪刀固定滑块_x_t.prt | 53.00K |
| 22 | 剪刀滑块.x_t | 32.00K |
| 23 | 剪刀滑块_id6_x_t.prt | 112.00K |
| 24 | 剪刀滑块_x_t.prt | 54.00K |
| 25 | 升降固定电机(修改_x_t.prt | 148.50K |
| 26 | 圆块-1.x_t | 17.59K |
| 27 | 圆块-1_x_t.prt | 111.00K |
| 28 | 圆连接.x_t | 26.81K |
| 29 | 圆连接_x_t.prt | 101.00K |
| 30 | 块连接-大-副本.x_t | 8.81K |
| 31 | 块连接-大-副本_x_t.prt | 116.50K |
| 32 | 块连接-大.x_t | 8.81K |
| 33 | 块连接-大_x_t.prt | 87.50K |
| 34 | 块连接-小.x_t | 10.18K |
| 35 | 块连接-小_x_t.prt | 90.50K |
| 36 | 导轨.prt | 227.50K |
| 37 | 导轨滑块.prt | 197.00K |
| 38 | 底板.prt | 201.50K |
| 39 | 底板丝杆固定-副本.prt | 228.12K |
| 40 | 底板丝杆固定.prt | 228.12K |
| 41 | 底板丝杆固定1.x_t | 29.56K |
| 42 | 底板侧边.prt | 233.00K |
| 43 | 底部总装配.prt | 137.00K |
| 44 | 总装配.x_t | 445.52K |
| 45 | 总装配1-副本.prt | 199.89K |
| 46 | 总装配1-副本_motion1-solution_1.msg | 21.82K |
| 47 | 总装配1-副本_motion1-solution_1.rad | 86.04K |
| 48 | 总装配1-副本_motion1-solution_1.rmd | 8.21K |
| 49 | 总装配1-副本_motion1-solution_1.rplt | 102.65K |
| 50 | 总装配1-副本_motion1.sim | 156.87K |
| 51 | 总装配1.prt | 200.29K |
| 52 | 总装配_id102_x_t.prt | 122.50K |
| 53 | 总装配_id107_x_t.prt | 112.00K |
| 54 | 总装配_id112_x_t.prt | 133.50K |
| 55 | 总装配_id117_x_t.prt | 106.00K |
| 56 | 总装配_id11_x_t.prt | 100.50K |
| 57 | 总装配_id124_x_t.prt | 160.00K |
| 58 | 总装配_id129_x_t.prt | 116.50K |
| 59 | 总装配_id140_x_t.prt | 109.00K |
| 60 | 总装配_id147_x_t.prt | 136.00K |
| 61 | 总装配_id152_x_t.prt | 93.00K |
| 62 | 总装配_id18_x_t.prt | 102.50K |
| 63 | 总装配_id25_x_t.prt | 102.00K |
| 64 | 总装配_id32_x_t.prt | 129.50K |
| 65 | 总装配_id37_x_t.prt | 115.50K |
| 66 | 总装配_id42_x_t.prt | 104.50K |
| 67 | 总装配_id49_x_t.prt | 103.50K |
| 68 | 总装配_id56_x_t.prt | 106.00K |
| 69 | 总装配_id6_x_t.prt | 132.00K |
| 70 | 总装配_id75_x_t.prt | 121.00K |
| 71 | 总装配_id82_x_t.prt | 93.50K |
| 72 | 总装配_id87_x_t.prt | 108.50K |
| 73 | 总装配_id92_x_t.prt | 103.00K |
| 74 | 总装配_id97_x_t.prt | 93.50K |
| 75 | 步进电机.x_t | 9.06K |
| 76 | 步进电机_id6_x_t.prt | 83.00K |
| 77 | 步进电机_x_t.prt | 54.00K |
| 78 | 步进电机杆.x_t | 2.98K |
| 79 | 步进电机杆_id6_x_t.prt | 73.50K |
| 80 | 步进电机杆_x_t.prt | 54.00K |
| 81 | 电机.prt | 176.00K |
| 82 | 电机块.prt | 164.50K |
| 83 | 装配.x_t | 242.31K |
| 84 | 装配_id13_x_t.prt | 93.50K |
| 85 | 装配_id32_x_t.prt | 110.50K |
| 86 | 装配_id39_x_t.prt | 100.50K |
| 87 | 装配_id44_x_t.prt | 79.50K |
| 88 | 装配_id49_x_t.prt | 122.00K |
| 89 | 装配_id54_x_t.prt | 106.00K |
| 90 | 装配_id61_x_t.prt | 94.50K |
| 91 | 装配_id66_x_t.prt | 88.50K |
| 92 | 装配_id6_x_t.prt | 94.00K |
| 93 | 装配_id71_x_t.prt | 144.00K |
| 94 | 装配_id76_x_t.prt | 80.50K |
| 95 | 装配_id81_x_t.prt | 127.50K |
| 96 | 轮子1.prt | 190.00K |
此图纸下载需要98金币
立即下载
发布者
一品三维工程师
创作: 291
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:x_t,prt
文件大小:4.93M
所需金币:98
上传时间:2024-06-25 22:28:39
是否可编辑:可修改,包括参数
版本:Parasolid
标签
机械手
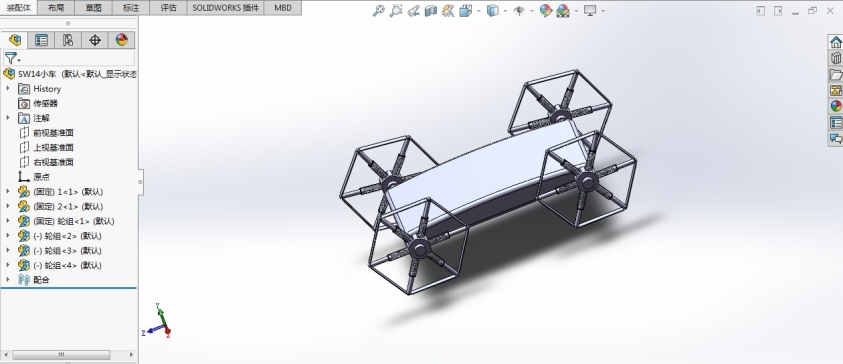
工程车
UG技术
智能装备
图纸简介
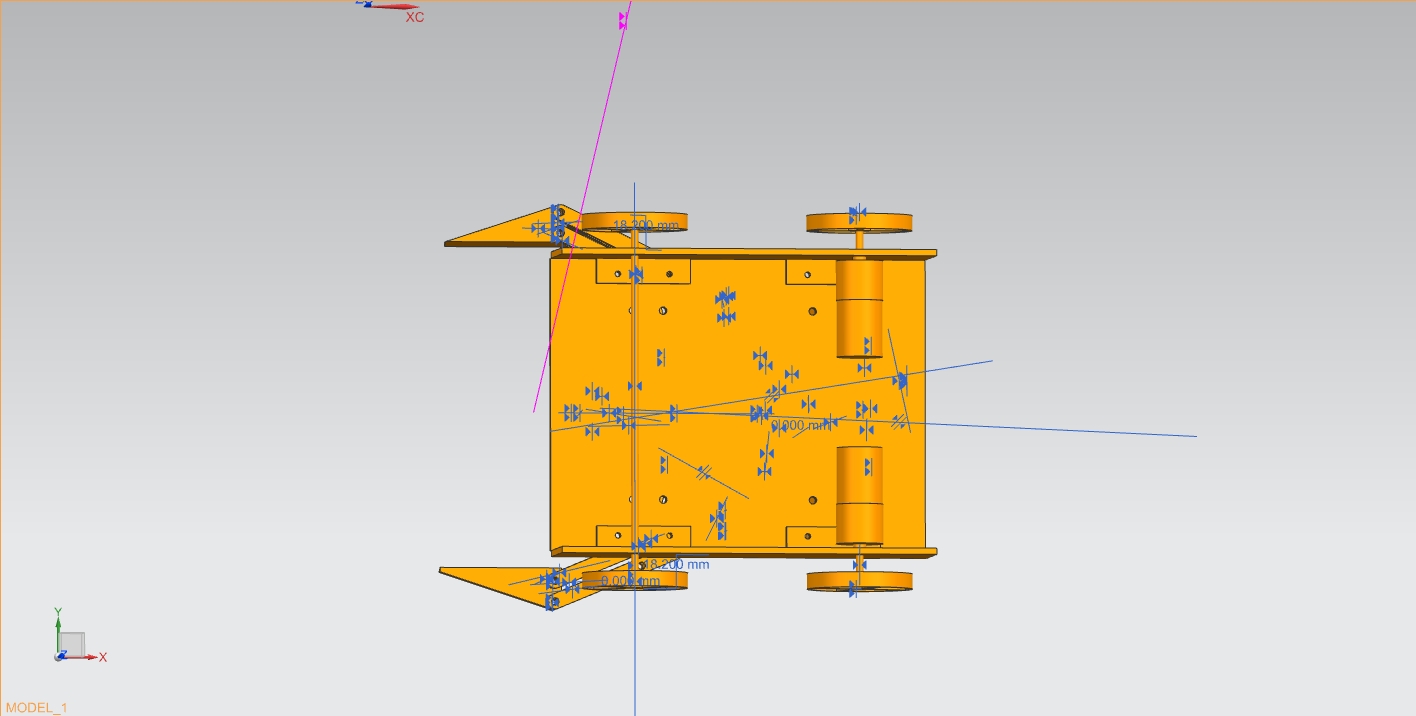
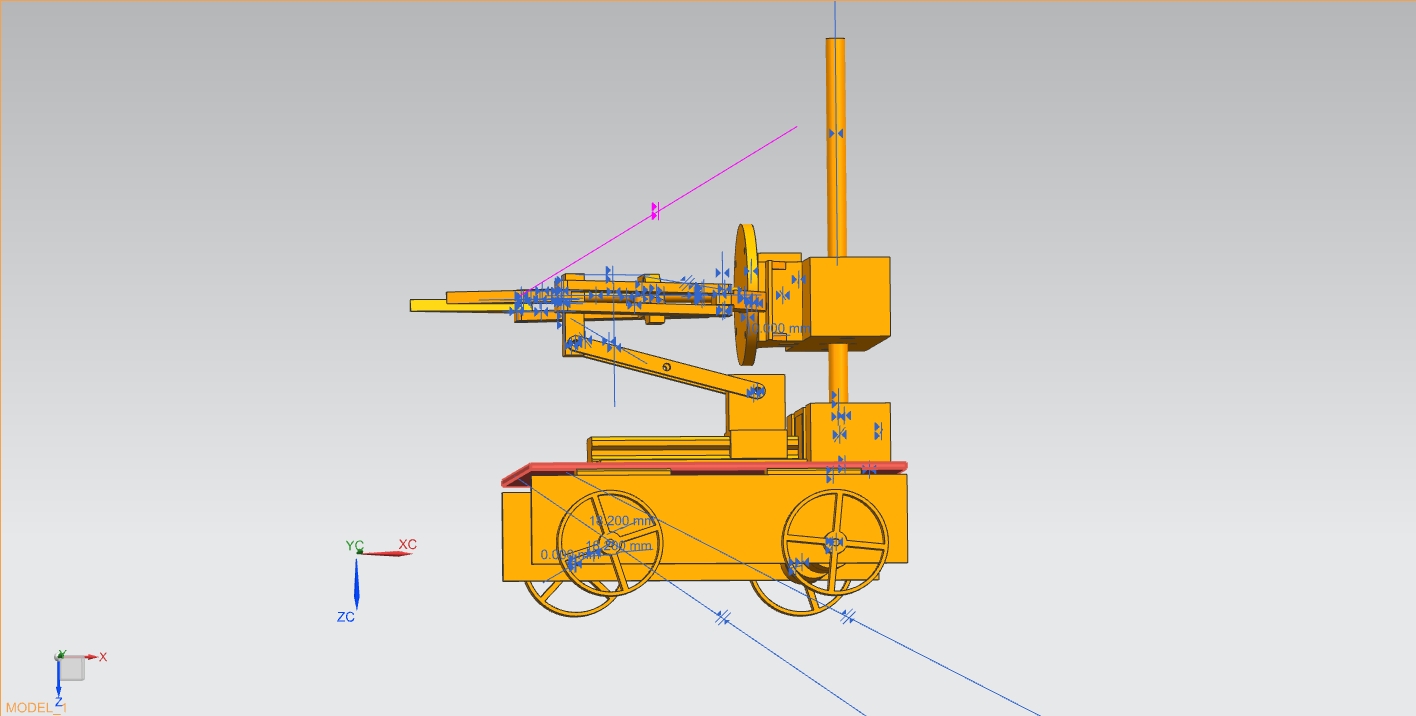
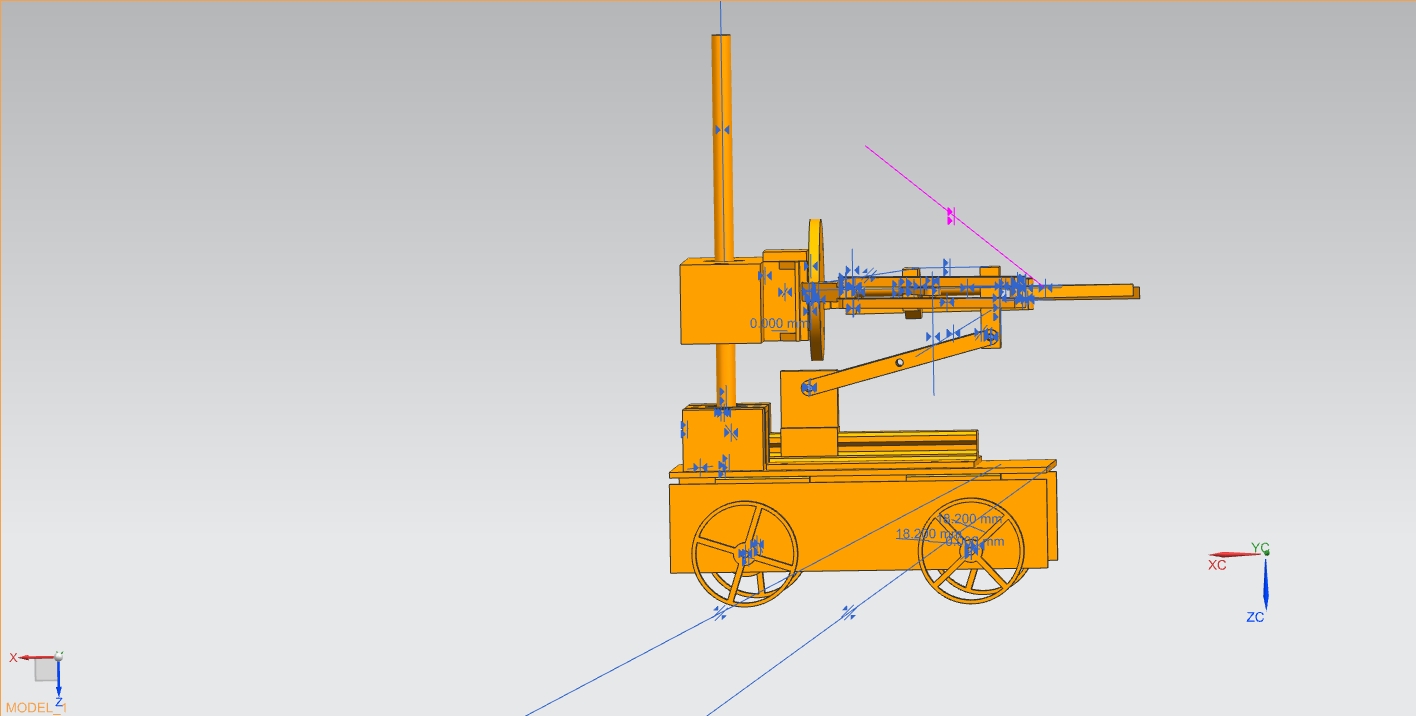
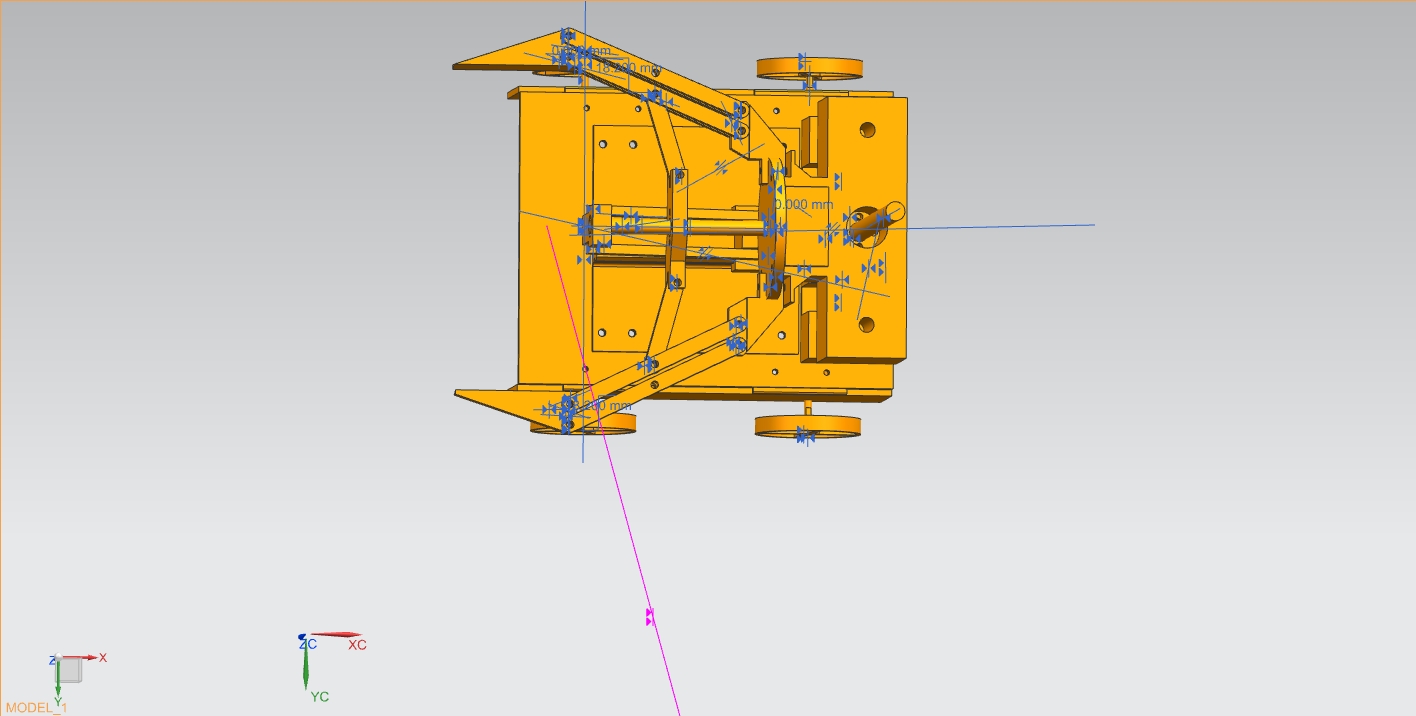
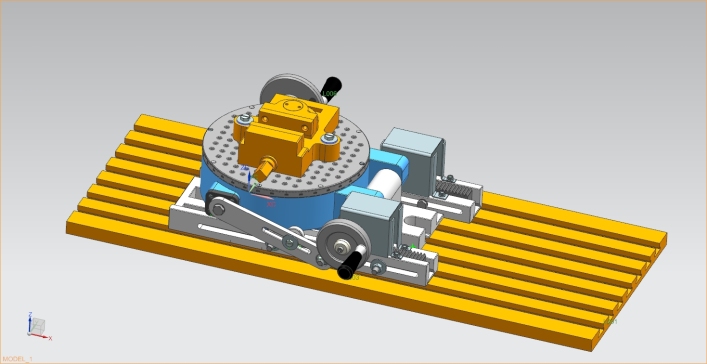
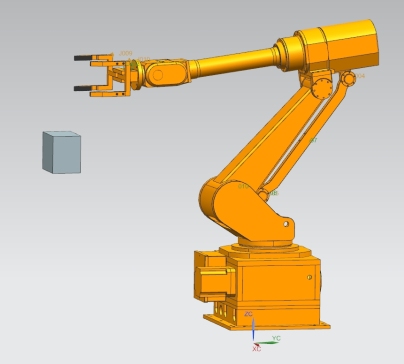
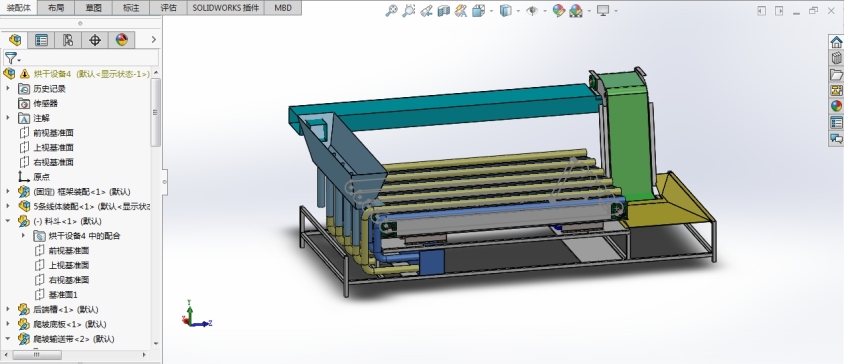
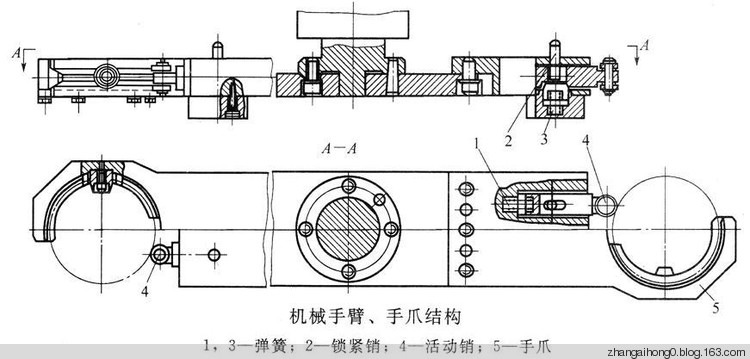
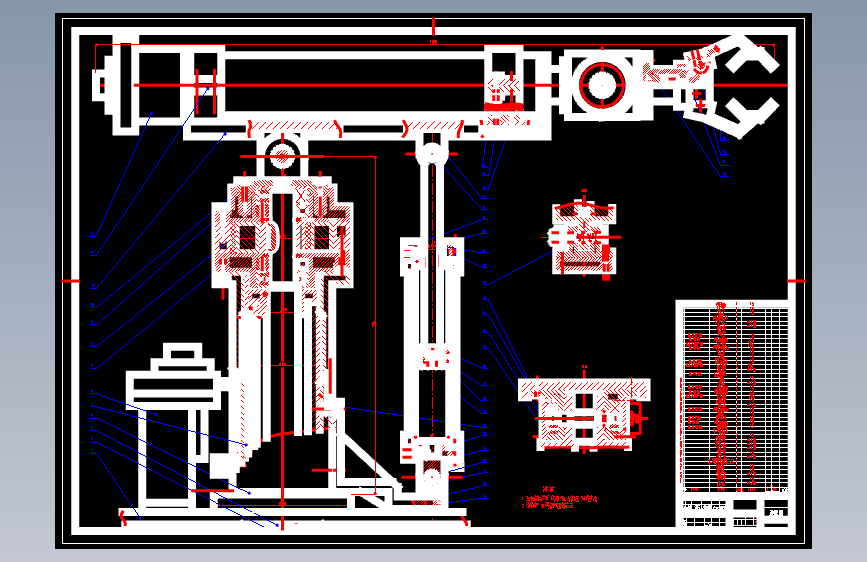
机械手工程车采用UG技术进行制图,确保了设计的精确度和高效性。图纸明细表详尽展示了各组件的规格、材料及数量,技术要求则详细阐述了产品的性能标准与安全规范。
设计原理基于自动化控制与机械传动技术,通过优化的结构设计和控制系统,实现了工程车的高效作业。其用途明确,主要用于建筑工地、矿山等场所的物料搬运与施工作业。通过优化设计和选材,机械手工程车不仅稳定耐用,而且具有优秀的操作性能和工作效率,为工程施工提供了强有力的支持。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
猜你喜欢
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

