登录注册
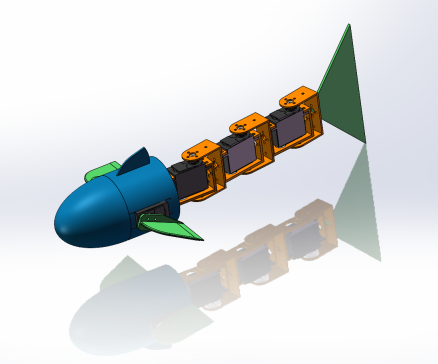
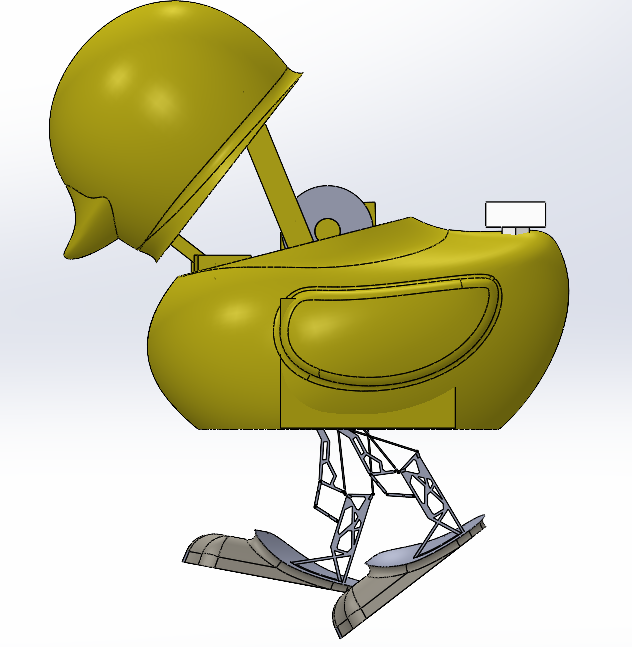
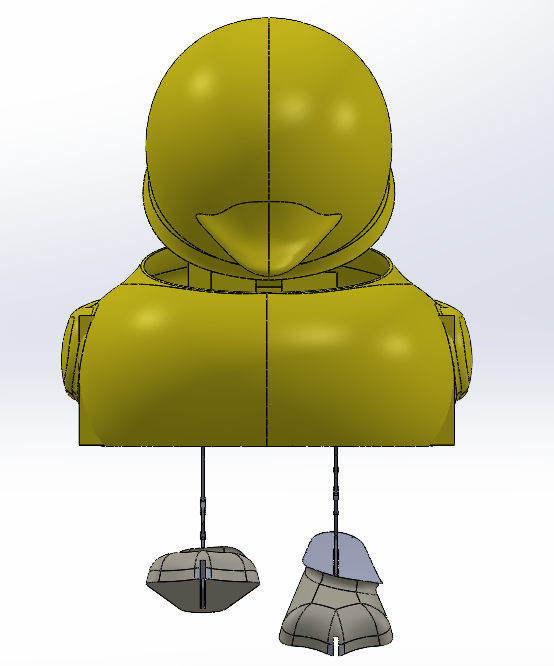
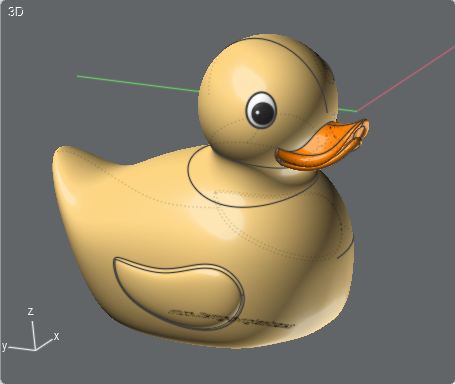
仿生鸭子模型(ID:1495148)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17214870832131.rar | 30.37M |
| 2 | 17.pdf | 2.05M |
| 3 | 基于切比雪夫机构.docx | 122.92K |
| 4 | 外文.docx | 959.69K |
| 5 | 说明书.docx | 1.60M |
| 6 | 鸭子相关资料.docx | 124.04K |
| 7 | Rubberduck5.SLDPRT | 1.56M |
| 8 | 平衡锤.SLDPRT | 149.25K |
| 9 | 摆锤.SLDPRT | 192.26K |
| 10 | 电机.SLDPRT | 1.36M |
| 11 | 电机齿轮.SLDPRT | 139.80K |
| 12 | 装配体2.mp4 | 48.96K |
| 13 | 装配体2.SLDASM | 1.61M |
| 14 | 连杆.SLDPRT | 1.36M |
| 15 | 鸭头.SLDPRT | 1.72M |
| 16 | 鸭头2.SLDPRT | 1.56M |
| 17 | 鸭身.SLDPRT | 2.47M |
| 18 | 右脚.SLDPRT | 1.64M |
| 19 | 右脚1.SLDPRT | 1.74M |
| 20 | 左脚.SLDPRT | 1.64M |
| 21 | 左脚1.SLDPRT | 1.75M |
| 22 | 定杆.SLDPRT | 100.29K |
| 23 | 草图.SLDPRT | 40.72K |
| 24 | 装配体1.SLDASM | 880.00K |
| 25 | 零件2.SLDPRT | 102.85K |
| 26 | 扶把.SLDPRT | 214.87K |
| 27 | 连杆.SLDPRT | 150.96K |
| 28 | 上端脚.SLDPRT | 424.78K |
| 29 | 下端脚右.SLDPRT | 1.20M |
| 30 | 下端脚左.SLDPRT | 1.32M |
| 31 | 右脚.SLDPRT | 475.32K |
| 32 | 左脚.SLDPRT | 361.50K |
| 33 | 杆.SLDPRT | 69.57K |
| 34 | 连杆2.SLDPRT | 85.03K |
| 35 | 连杆右.SLDPRT | 147.29K |
| 36 | 连杆左.SLDPRT | 146.40K |
| 37 | 驱动杆短.SLDPRT | 146.61K |
| 38 | 驱动杆长.SLDPRT | 349.46K |
| 39 | 零件1.SLDPRT | 66.72K |
| 40 | 驱动盘.SLDPRT | 98.04K |
| 41 | 电机箱.SLDPRT | 784.33K |
| 42 | 电机轴.SLDPRT | 91.88K |
此图纸下载需要70金币
立即下载
发布者
机械小粤
创作: 885
粉丝: 93
加入时间:2023-06-17

模型信息
图纸格式:pdf,sldprt,sldasm
文件大小:31.1M
所需金币:70
上传时间:2024-07-20 22:51:39
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2021
标签
图纸简介
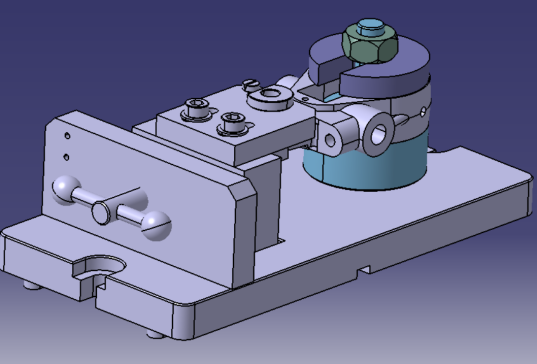
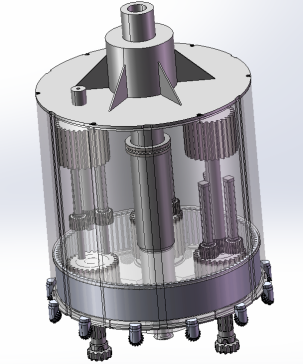
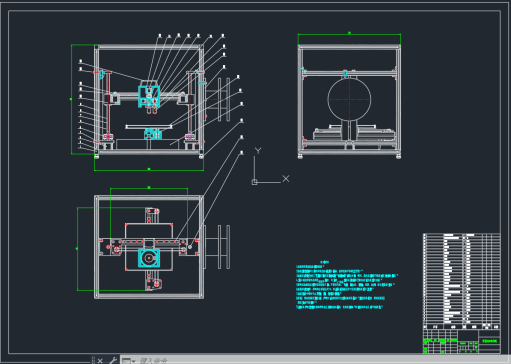
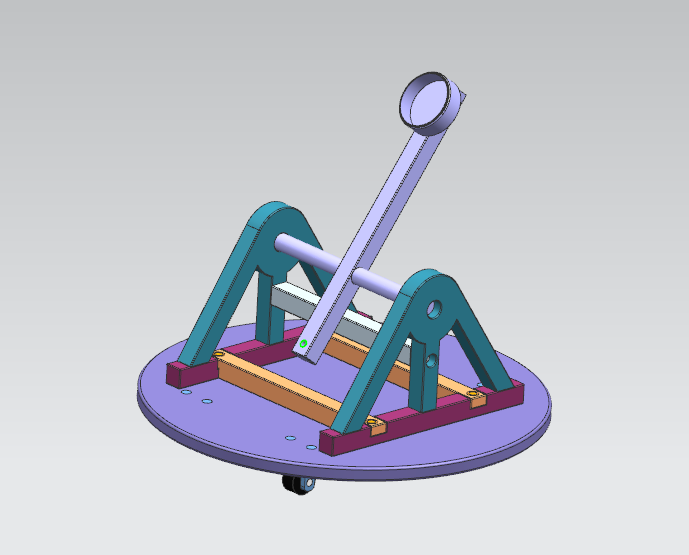
仿生学的意义在于通过模仿生物系统的结构、特质、功能、能量转换、信息控制等优异特征,并将其应用到技术系统中,从而改善已有的技术工程设备,创造出新的工艺过程、建筑构型、自动化装置等技术系统,为人类提供最可靠、最灵活、最高效、最经济的接近于生物系统的技术系统,为人类造福。该模型为sw2021仿生鸭子模型包含说明书
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)