
登录注册
旋转关节机器人绝对定位精度标定系统设计含16张CAD图(ID:1690503)
0.png)


0.png)
0.png)
0.png)
0.png)





| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17326947113246.zip | 8.00M |
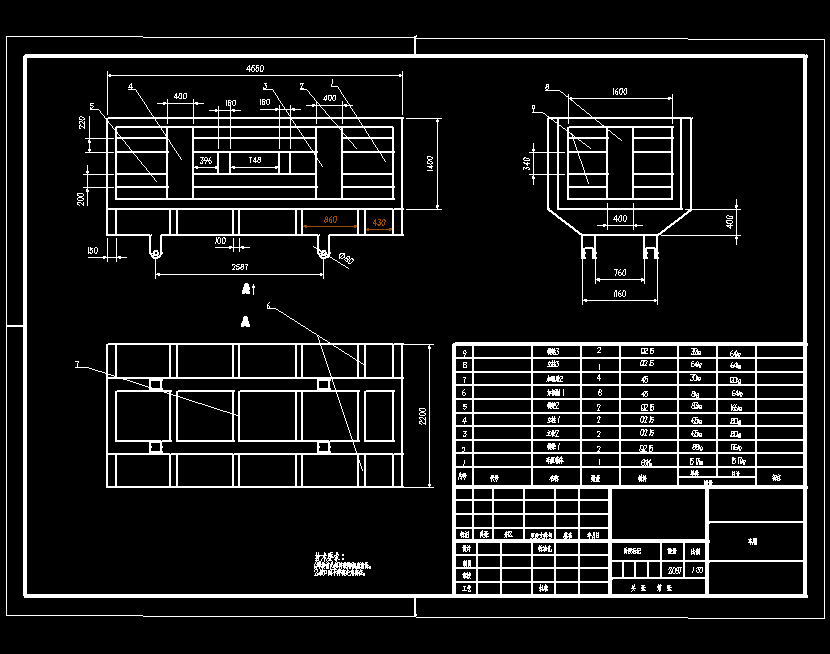
| 2 | A0装配图合并.dwg | 228.79K |
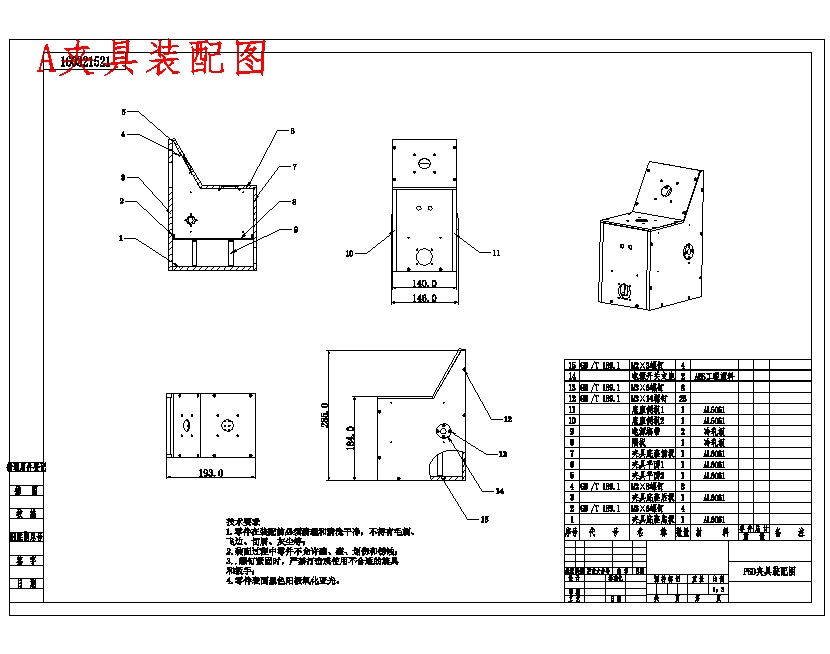
| 3 | A夹具装配图.dwg | 179.48K |
| 4 | A法兰盘装配图.dwg | 96.99K |
| 5 | X50简介-旋转关节机器人绝对定位精度标定系统设计含16张CAD图.pdf | 2.68M |
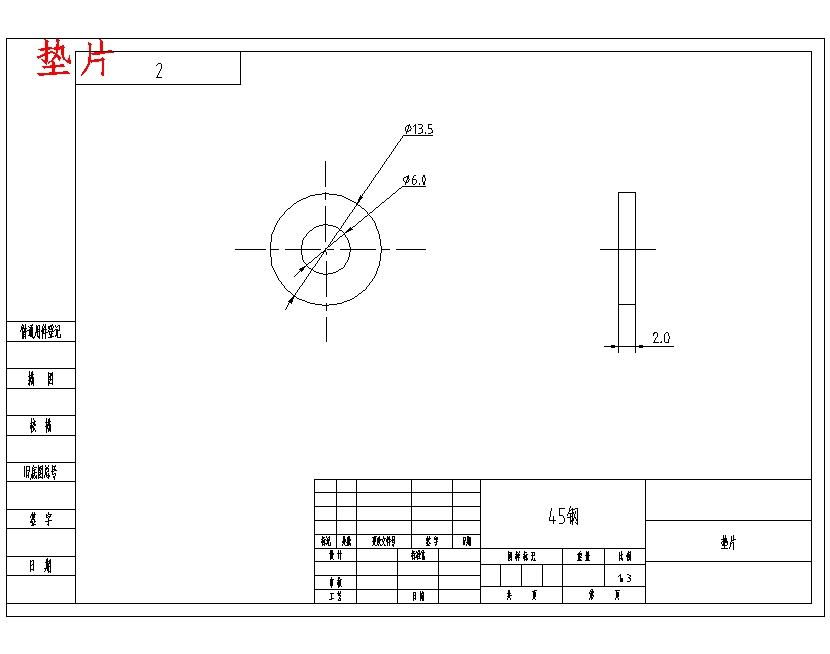
| 6 | 垫片.dwg | 138.96K |
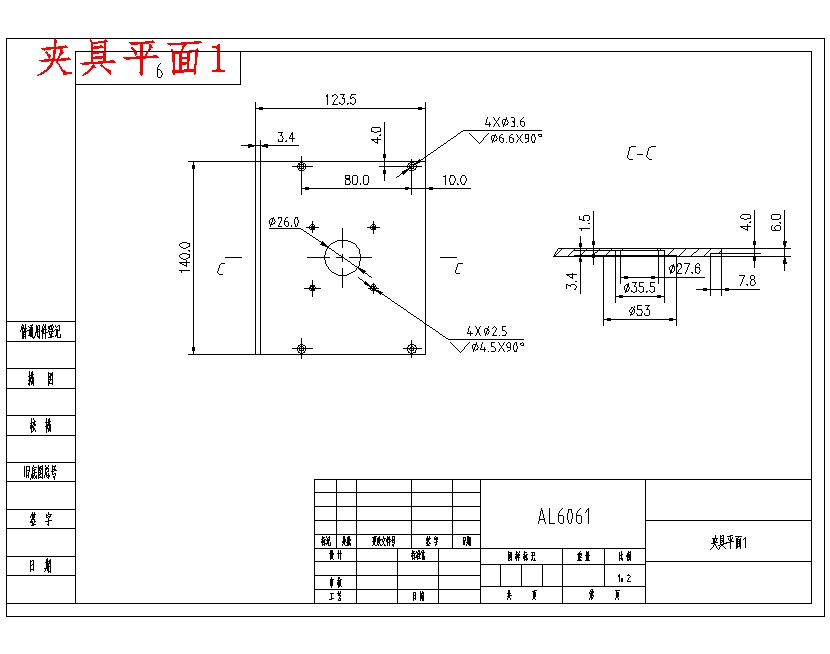
| 7 | 夹具平面1.dwg | 147.62K |
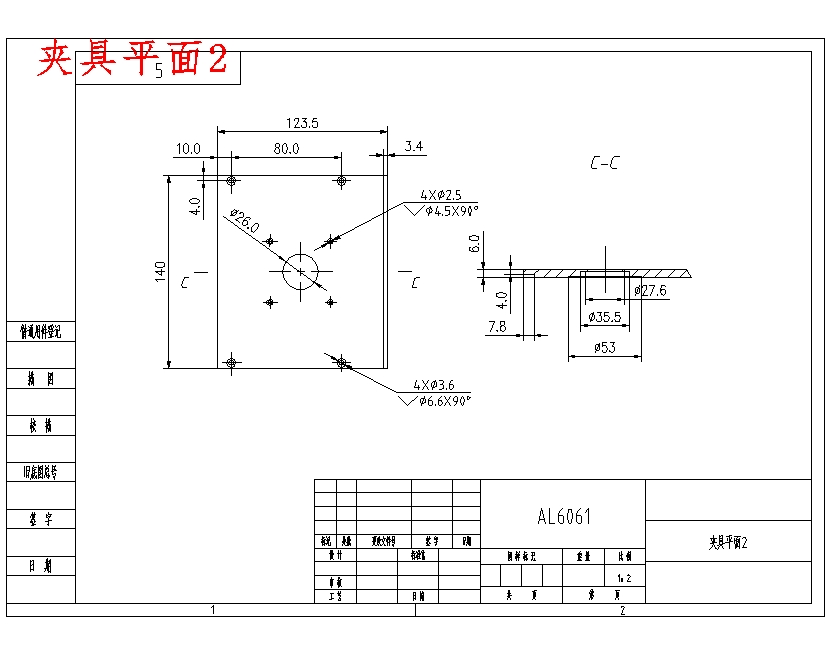
| 8 | 夹具平面2.dwg | 147.34K |
| 9 | 夹具底座前板.dwg | 146.75K |
| 10 | 夹具底座后板.dwg | 145.62K |
| 11 | 夹具底座底板.dwg | 143.40K |
| 12 | 字数.JPG | 64.97K |
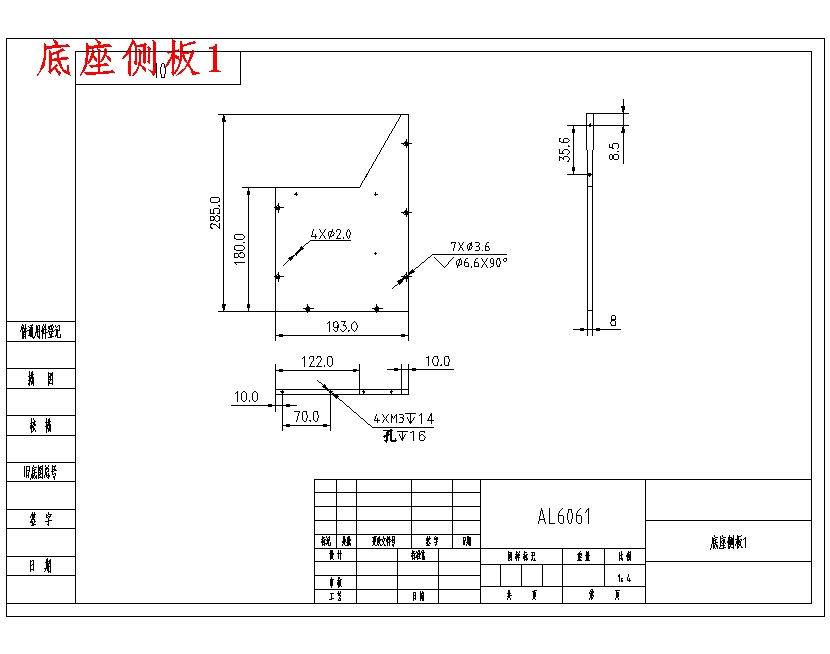
| 13 | 底座侧板1.dwg | 146.47K |
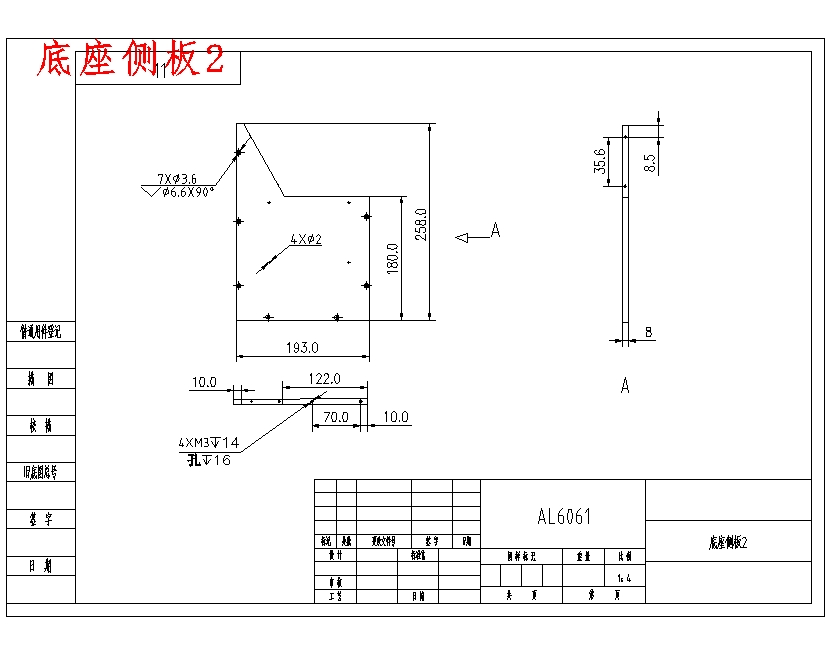
| 14 | 底座侧板2.dwg | 146.84K |
| 15 | 旋转关节机器人绝对定位精度标定系统设计说明书.docx | 1.82M |
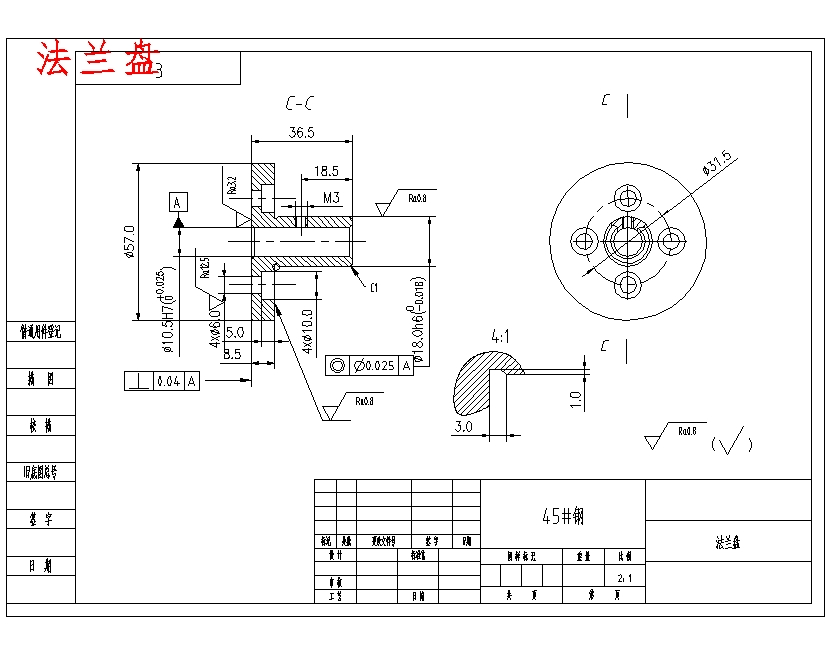
| 16 | 法兰盘.dwg | 157.31K |
| 17 | 流程图A0.dwg | 74.17K |
| 18 | 电源开关支座.dwg | 141.78K |
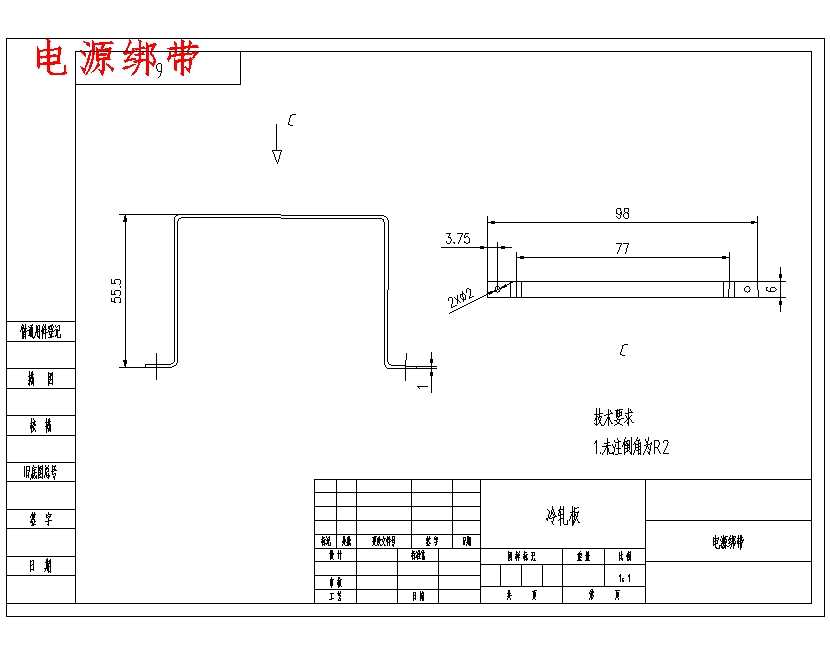
| 19 | 电源绑带.dwg | 144.18K |
| 20 | 电路图A0.dwg | 444.06K |
| 21 | 程序源文件.zip | 24.02K |
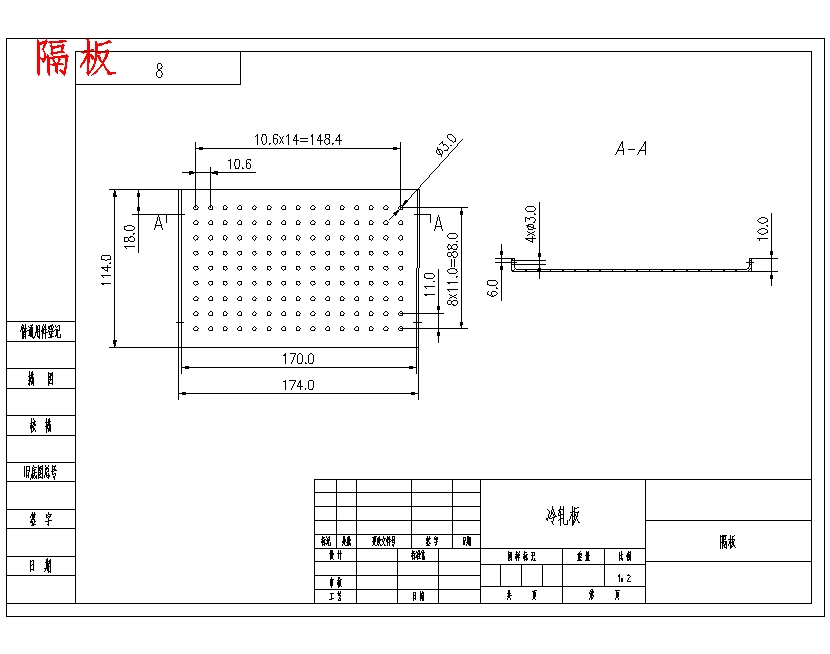
| 22 | 隔板.dwg | 156.51K |
| 23 | 零件图纸汇总.dwg | 341.66K |
| 24 | 1字数.JPG | 64.97K |
| 25 | 2摘要.JPG | 104.09K |
| 26 | 3设计所包含文件.jpg | 65.58K |
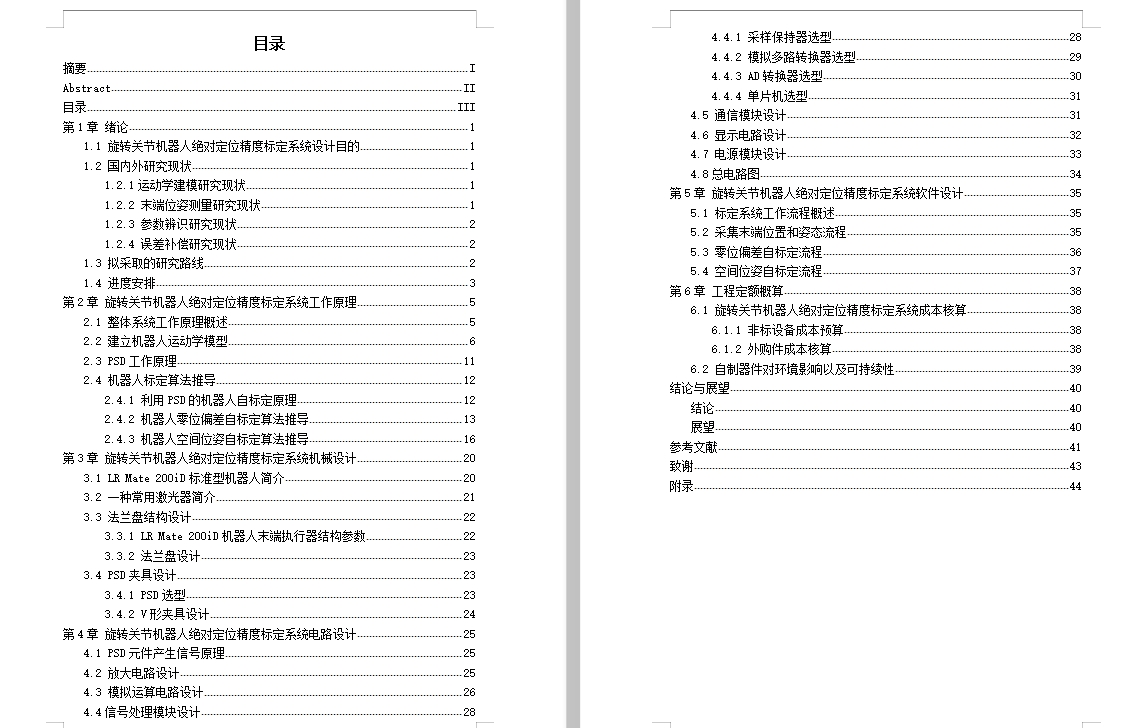
| 27 | 4目录.JPG | 456.27K |
| 28 | A夹具装配图.jpg | 180.88K |
| 29 | A法兰盘装配图.jpg | 162.22K |
| 30 | 垫片.jpg | 83.67K |
| 31 | 夹具平面1.jpg | 119.78K |
| 32 | 夹具平面2.jpg | 120.16K |
| 33 | 夹具底座前板.jpg | 123.27K |
| 34 | 夹具底座后板.jpg | 116.82K |
| 35 | 夹具底座底板.jpg | 110.80K |
| 36 | 底座侧板1.jpg | 110.29K |
| 37 | 底座侧板2.jpg | 111.65K |
| 38 | 法兰盘.jpg | 153.50K |
| 39 | 流程图A0.jpg | 139.14K |
| 40 | 电源开关支座.jpg | 119.04K |
| 41 | 电源绑带.jpg | 95.34K |
| 42 | 电路图A0.jpg | 164.17K |
| 43 | 隔板.jpg | 128.98K |
| 44 | Calibration20180508.m | 2.15K |
| 45 | LMFsolve.m | 5.85K |
| 46 | ros.m | 932.77K |
此图纸下载需要250金币
立即下载
发布者
设计吧
创作: 4943
粉丝: 43
加入时间:2024-02-20

模型信息
图纸格式:dwg,pdf
文件大小:8.19M
所需金币:250
上传时间:2024-11-27 16:05:14
是否可编辑:可修改,包括参数
版本:AutoCAD 2004
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0.png)
猜你喜欢
0.jpg)
0.png)
0.jpg)
0.png)
0.png)
0.jpg)
0_0_364.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

