
登录注册
变径管道机器人(ID:2005025)
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1744118964297.rar | 8.93M |
| 2 | 42步进电机A.SLDPRT | 363.19K |
| 3 | 52mm轮胎A.SLDPRT | 568.07K |
| 4 | 70mm连杆3转A.SLDPRT | 153.60K |
| 5 | 70mm连杆A.SLDPRT | 112.97K |
| 6 | 80mm连杆A.SLDPRT | 107.47K |
| 7 | 8mm滚珠丝杠A.SLDPRT | 105.27K |
| 8 | GB/T276-94深沟球轴承628/8-2ZA.SLDPRT | 873.33K |
| 9 | GB/T41-20001型六角螺母C级M5A.SLDPRT | 197.78K |
| 10 | GB/T5780-2000六角头螺栓C级M5×20A.SLDPRT | 187.63K |
| 11 | GB/T70.1-2000内六角圆柱头螺钉M2×4A.SLDPRT | 211.93K |
| 12 | GB/T70.1-2000内六角圆柱头螺钉M3×10A.SLDPRT | 220.36K |
| 13 | GB/T70.1-2000内六角圆柱头螺钉M3×6A.SLDPRT | 211.27K |
| 14 | GB/T70.1-2000内六角圆柱头螺钉M4×6A.SLDPRT | 208.88K |
| 15 | GB/T70.1-2000内六角圆柱头螺钉M5×12A.SLDPRT | 219.20K |
| 16 | GB/T70.1-2000内六角圆柱头螺钉M5×16A.SLDPRT | 223.91K |
| 17 | GB/T70.1-2000内六角圆柱头螺钉M5×20A.SLDPRT | 224.93K |
| 18 | GB/T77-2000内六角平端紧定螺钉M3×3A.SLDPRT | 101.84K |
| 19 | JGY370双出轴直流减速电机A.SLDPRT | 217.04K |
| 20 | M5螺母A.SLDPRT | 109.48K |
| 21 | 丝杆螺母A.SLDPRT | 162.72K |
| 22 | 丝杆螺母连接块A.SLDPRT | 201.59K |
| 23 | 外壳中部A.SLDPRT | 215.45K |
| 24 | 外壳头部A.SLDPRT | 391.66K |
| 25 | 外壳尾部A.SLDPRT | 236.21K |
| 26 | 总装配体A.SLDASM | 1.78M |
| 27 | 梅花联轴器A.SLDASM | 195.55K |
| 28 | 联轴器A.SLDPRT | 148.64K |
| 29 | 联轴器部件1A.sldprt | 43.29K |
| 30 | 联轴器部件2A.sldprt | 78.86K |
| 31 | 联轴器部件3A.sldprt | 40.84K |
| 32 | 联轴器部件4A.sldprt | 77.99K |
| 33 | 螺母组件1A.SLDASM | 115.62K |
| 34 | 轮组壳A.SLDPRT | 164.61K |
| 35 | 轮组总装1111A.SLDASM | 589.84K |
| 36 | 轮组盖A.SLDPRT | 168.69K |
| 37 | 轴承座A.SLDPRT | 158.39K |
此图纸下载需要70金币
立即下载
发布者
机械小粤
创作: 965
粉丝: 100
加入时间:2023-06-17

模型信息
图纸ID:2005025
图纸格式:sldprt,sldasm
文件大小:9.14M
所需金币:70
上传时间:2025-04-08 21:30:33
是否可编辑:可修改,包括参数
软件版本:SOLIDWORKS 2024
标签
图纸简介
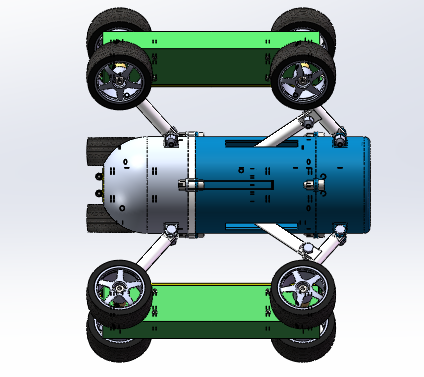
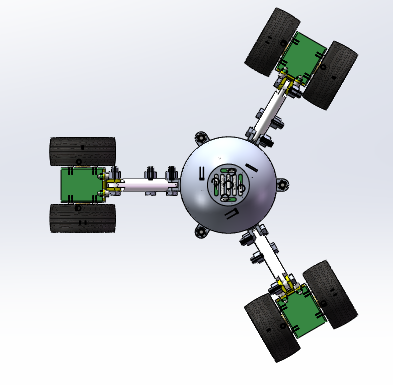
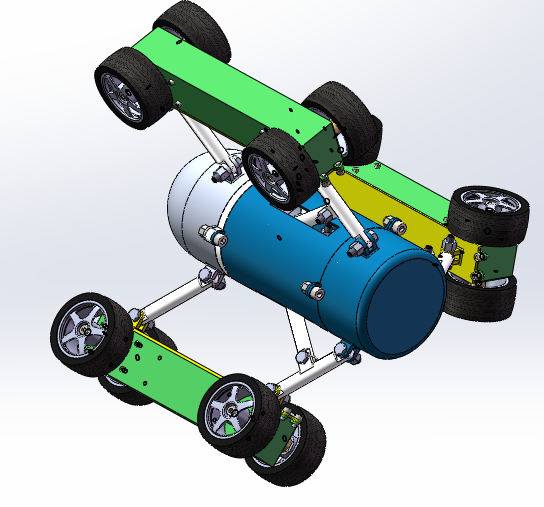
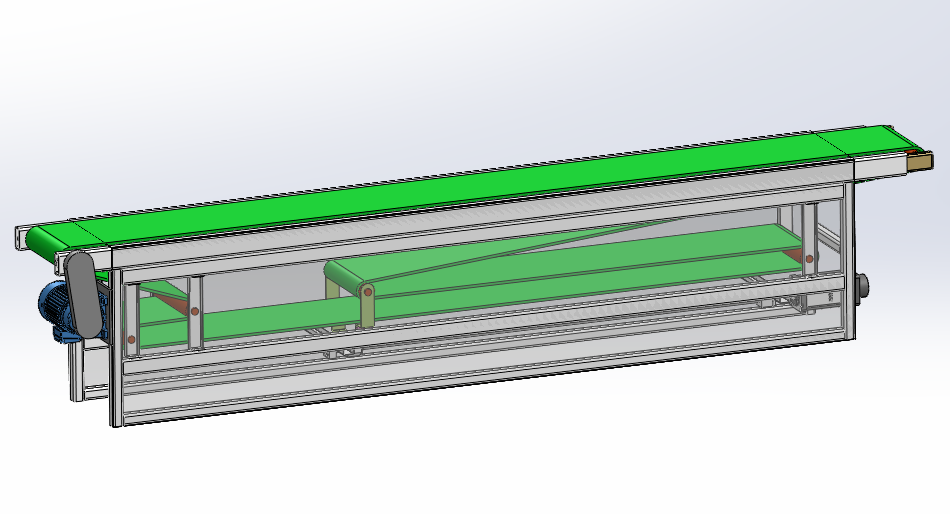
变径管道检测机器人主要需要满足能在25-35cm的小管道内进行移动。因此,设计思路因围绕如何适应不同管径的管道,即本次变径管道检测机器人主要设计内容为变径机构,其余部分应先满足变径部分的需求再进行设计。变径管道检测机器人主要应该由外壳,变径机构,轮组组成。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.jpg)
0.png)
0.png)
0.jpg)
0.png)
![立式管道泵[LPP32]](https://html.lazystones.com/lazy/2137774/image/c5132660-668f-4092-bb7d-4879e035796c原图(主)0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

