
登录注册
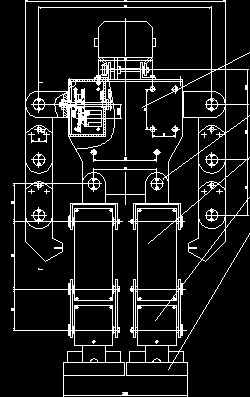
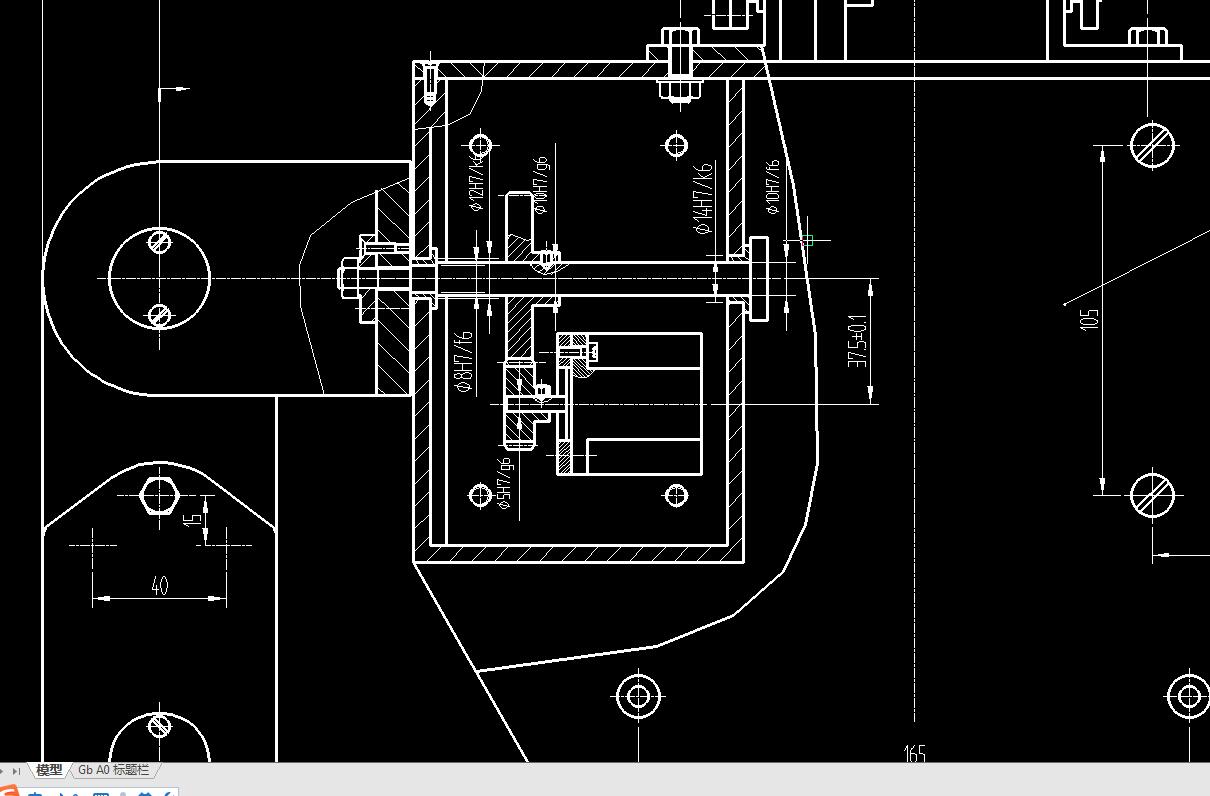
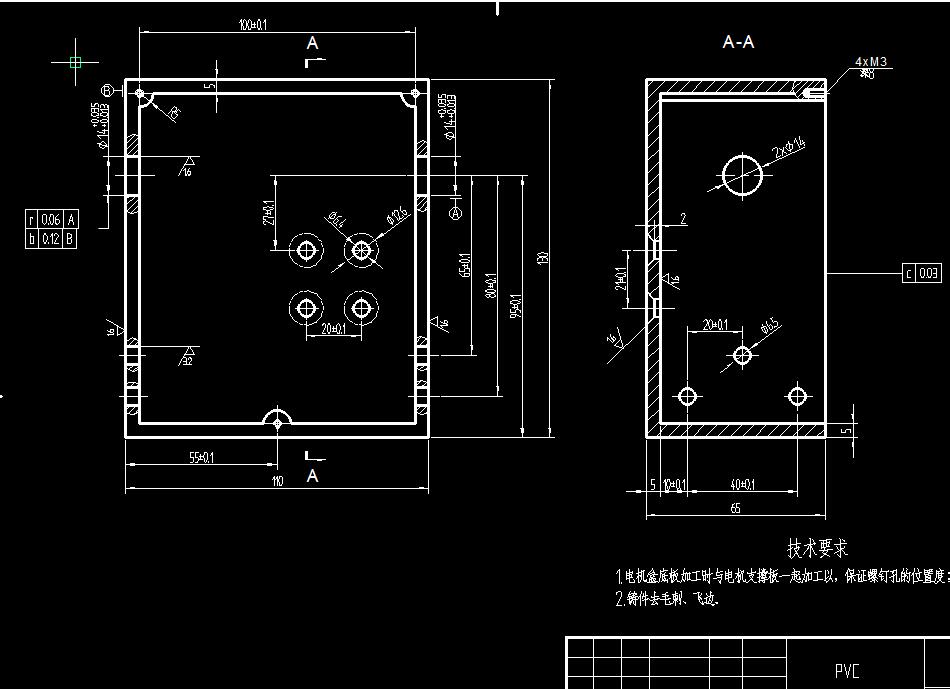
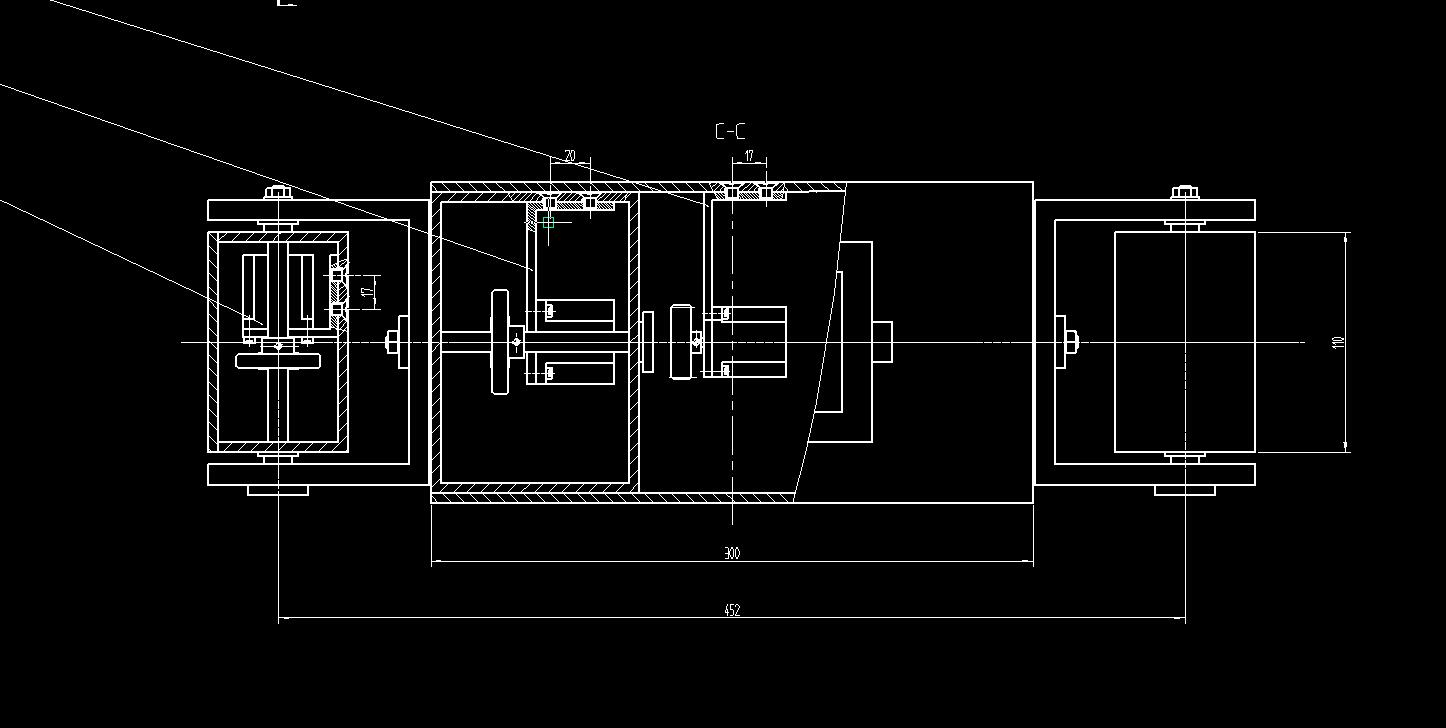
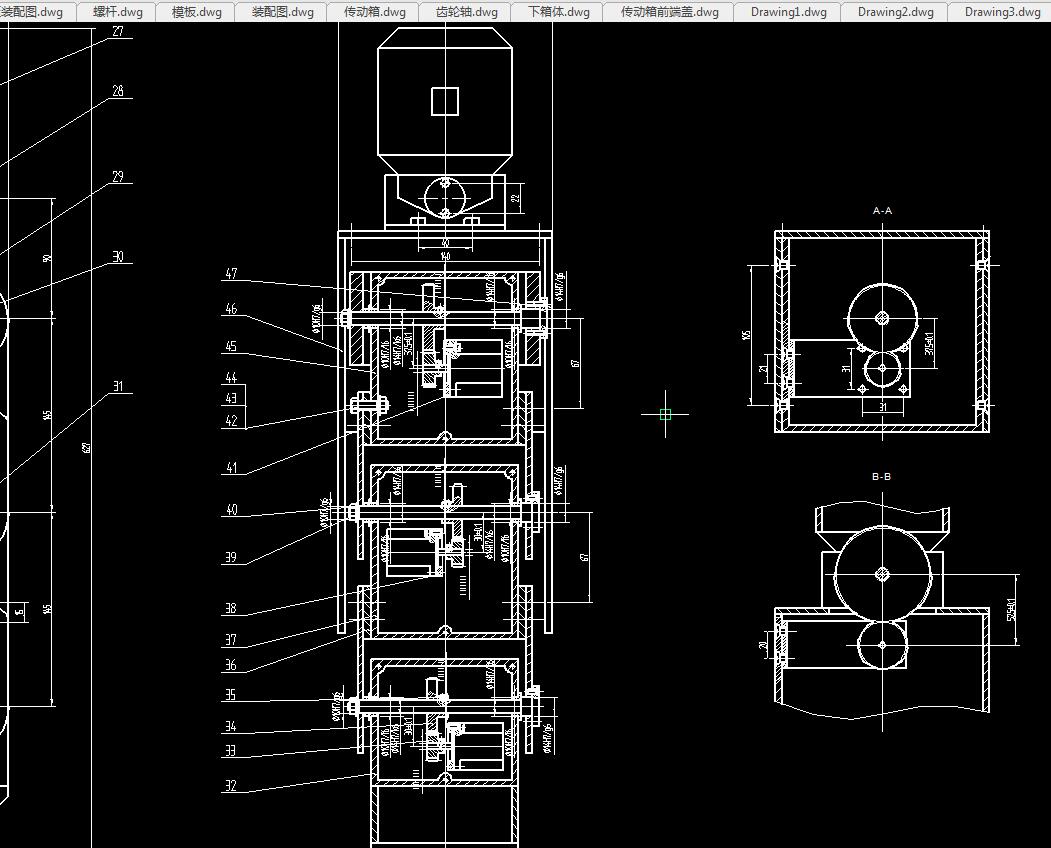
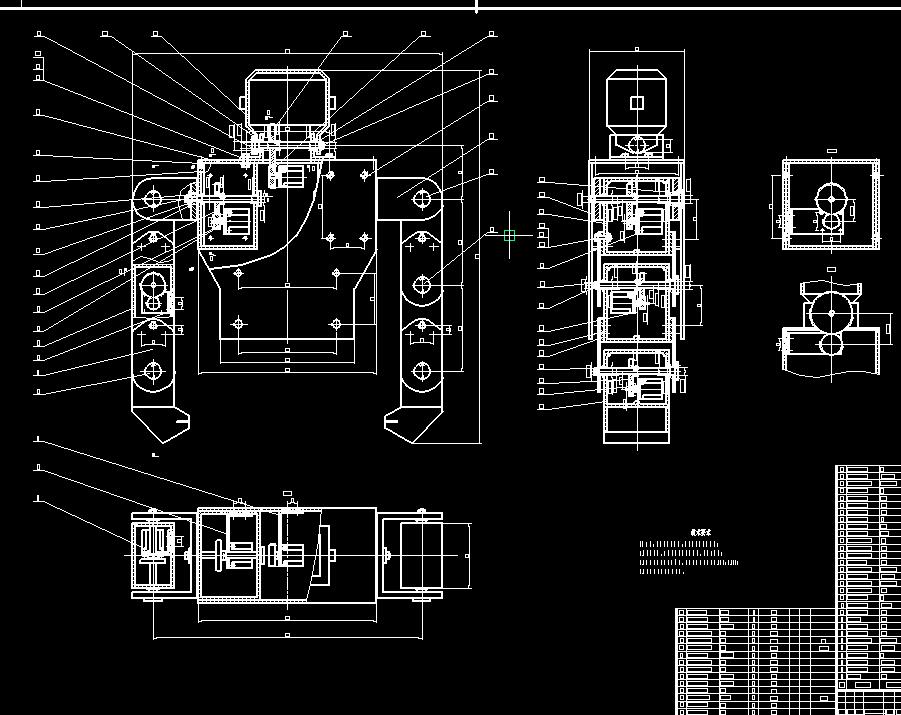
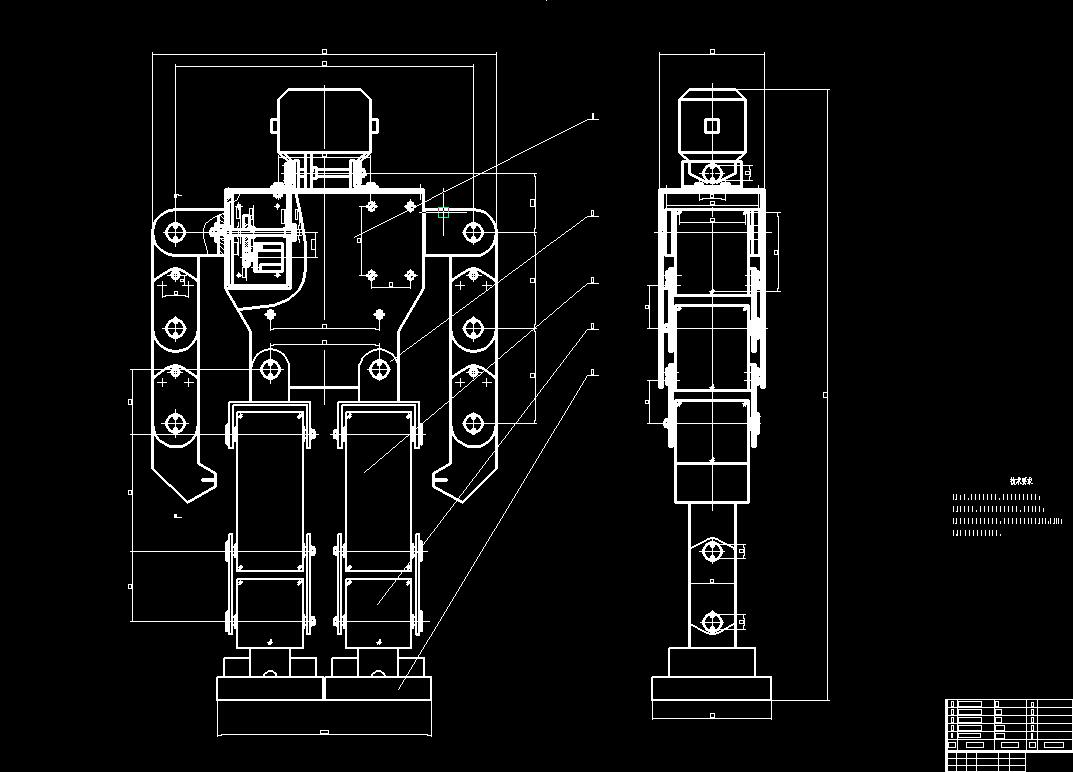
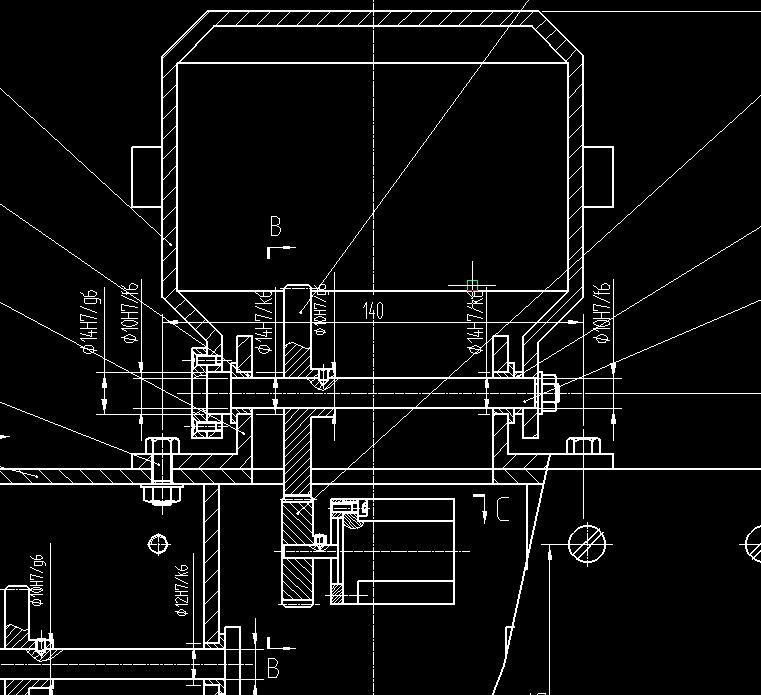
仿人型机器人总体及臂手部结构设计(ID:2012138)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染
0.png)

0.png)
0.png)
0.png)
0.png)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | (00主要图纸预览.doc | 564.50K |
| 2 | jietu20210317144400.jpg | 69.27K |
| 3 | jietu20210317144831.jpg | 86.90K |
| 4 | jietu20210317145139.jpg | 102.98K |
| 5 | jietu20210317145147.jpg | 102.20K |
| 6 | jietu20210317145154.jpg | 62.04K |
| 7 | jietu20210317145209.jpg | 68.19K |
| 8 | jietu20210317145222.jpg | 56.12K |
| 9 | 9]JGK9S3{E5WXQ`_P7WWG.jpg | 33.48K |
| 10 | 总装图-陆静金2007.dwg | 204.71K |
| 11 | 部装图-陆静金2007.dwg | 272.25K |
| 12 | 三维图-陆静金2007.doc | 2.14M |
| 13 | 图册-陆静金2007.doc | 508.50K |
| 14 | 前胸板-陆静金2007.dwg | 63.39K |
| 15 | 固定轴套-陆静金2007.dwg | 60.65K |
| 16 | 大臂电机盒-陆静金2007.dwg | 82.50K |
| 17 | 电机支撑板-陆静金2007.dwg | 71.73K |
| 18 | 肘部轴-陆静金2007.dwg | 64.54K |
| 19 | 肘部连接板-陆静金2007.dwg | 59.89K |
| 20 | 肩部轴-陆静金2007.dwg | 64.32K |
| 21 | 肩部连接板-陆静金2007.dwg | 71.23K |
| 22 | 仿人型机器人总体及臂手部结构设计.doc | 985.00K |
| 23 | 仿人型机器人总体及臂手部结构设计开题报告.doc | 170.00K |
| 24 | 外文文献-陆静金2007.pdf | 51.15K |
| 25 | 摘要-陆静金-2007.doc | 33.50K |
| 26 | 毕业设计任务书-陆静金2007.doc | 231.00K |
| 27 | 毕业设计说明书封面-陆静金2007.doc | 146.50K |
| 28 | 英文翻译-陆静金2007.doc | 195.50K |
| 29 | 2063cde78ff865a1b46cd3ee526490b7.jpg | 187.01K |
| 30 | 67dd9604f83d81c2b13effcb8c7712bb.jpg | 21.62K |
| 31 | 765d7e8fe449c1f5079a284d0ea2d8f1.jpg | 4.33K |
| 32 | 7ADSDEE_2_KM3TZVVVQTQE.jpg | 223.01K |
| 33 | a33008efad24fa5e5b08e056b3d953ce.jpg | 129.37K |
| 34 | a590dee2745b06dc84991c50e4f2bd2e.jpg | 437.89K |
| 35 | fb9570c64a2556ceed1c2edd354242a7.jpg | 97.49K |
| 36 | JFZ9]NEB9IHYH3`9U9U6CB.jpg | 212.40K |
| 37 | _5PJM[UJ{KTM4EGHWUX3}B.jpg | 155.85K |
| 38 | 仿人机器人发展现状及其腰部机构研究-陆静金2007.pdf | 208.32K |
| 39 | 仿人步行机器人机构设计-陆静金2007.pdf | 603.34K |
| 40 | 文献资料-陆静金2007.doc | 152.50K |
| 41 | 毕业实习报告-陆静金2007.doc | 159.00K |
| 42 | 课题申报表-陆静金2007.doc | 38.00K |
此图纸下载需要180金币
立即下载
发布者
图纸修改代做18067474399
创作: 1360
粉丝: 13
加入时间:2025-04-11

模型信息
图纸ID:2012138
图纸格式:dwg,pdf
文件大小:6.86M
所需金币:180
上传时间:2025-04-11 21:24:12
是否可编辑:可修改,包括参数
软件版本:AutoCAD 2007
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0_0_364.png)
0.png)


0.png)

0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

