
登录注册
无轨焊接机器人-SW+CAD+论文(ID:2347887)
0.png)

1.png)
4.png)
2.png)
3.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1.png | 77.55K |
| 2 | 1751468747724.zip | 61.85M |
| 3 | 2.png | 113.48K |
| 4 | 3.png | 49.28K |
| 5 | 4.png | 37.89K |
| 6 | 5.png | 97.51K |
| 7 | 6.png | 374.81K |
| 8 | 7.png | 250.89K |
| 9 | 无轨智能焊接机器人系统的设计.docx | 2.19M |
| 10 | 同步带轮A3-模型.pdf | 78.19K |
| 11 | 同步带轮A3.DWG | 321.05K |
| 12 | 总装配小车A1-模型.pdf | 253.30K |
| 13 | 总装配小车A1.dwg | 1.01M |
| 14 | 机械手大臂右侧板A3-模型.pdf | 122.33K |
| 15 | 机械手大臂右侧板A3.dwg | 413.15K |
| 16 | 机械手底座A3-模型.pdf | 79.73K |
| 17 | 机械手底座A3.dwg | 238.30K |
| 18 | 机械手装配图A1-模型.pdf | 249.15K |
| 19 | 机械手装配图A1.dwg | 1.37M |
| 20 | 焊接机器人总装A0-模型.pdf | 135.75K |
| 21 | 焊接机器人总装A0.DWG | 512.92K |
| 22 | 电机1法兰A3-模型.pdf | 86.58K |
| 23 | 电机1法兰A3.dwg | 245.39K |
| 24 | 001_asm.SLDASM | 6.44M |
| 25 | B606ZZA.sldprt | 69.79K |
| 26 | BGTNB606ZZA.sldasm | 79.67K |
| 27 | E32-C42光纤传感器.SLDPRT | 91.91K |
| 28 | E32-C42光纤传感器固定块.SLDDRW | 370.00K |
| 29 | E32-C42光纤传感器固定块.SLDPRT | 68.55K |
| 30 | FL57STH41-2804A.SLDPRT | 213.29K |
| 31 | GB894.1-86轴用弹性挡圈A型20.SLDPRT | 151.50K |
| 32 | GB/T276-94深沟球轴承61803-2RZ.SLDPRT | 584.50K |
| 33 | GB/T276-94深沟球轴承61907-2Z.SLDPRT | 868.00K |
| 34 | GB/T276-94深沟球轴承6204-2Z.SLDPRT | 616.50K |
| 35 | GB/T301-1995推力球轴承51205.SLDPRT | 333.00K |
| 36 | GB/T70.2-2000内六角平圆头螺钉M3×4.SLDPRT | 193.50K |
| 37 | GB/T70.2-2000内六角平圆头螺钉M5×10.SLDPRT | 188.00K |
| 38 | GB/T894。1轴用弹性挡圈A型5A.SLDPRT | 60.00K |
| 39 | GB/T894。1轴用弹性挡圈A型6A.SLDPRT | 59.52K |
| 40 | housing_BGTNB606ZZA.sldprt | 76.69K |
| 41 | HTPA30S3M060_A_P8.sldprt | 399.78K |
| 42 | HTPA30S3M060_A_P8加工.SLDDRW | 535.00K |
| 43 | HTPA36S3M060_A_P6.sldprt | 391.91K |
| 44 | SWBKOFF.SWB | 16.87K |
| 45 | swBKTask.error | 0B |
| 46 | 传感器安装块.SLDDRW | 549.00K |
| 47 | 传感器安装块.SLDPRT | 123.58K |
| 48 | 光纤传感器.SLDASM | 117.99K |
| 49 | 六轴机器人总装图2.SLDDRW | 4.00M |
| 50 | 内六角圆柱头螺钉M4×12.SLDPRT | 101.71K |
| 51 | 内六角圆柱头螺钉M6×10.SLDPRT | 206.50K |
| 52 | 同步带2.SLDPRT | 785.54K |
| 53 | 大手臂右侧板.SLDDRW | 899.50K |
| 54 | 大手臂右侧板.SLDPRT | 584.87K |
| 55 | 大手臂左侧板.SLDDRW | 817.00K |
| 56 | 大手臂左侧板.SLDPRT | 492.58K |
| 57 | 大手臂支杆.SLDDRW | 404.00K |
| 58 | 大手臂支杆.SLDPRT | 62.20K |
| 59 | 大手臂旋转轴.SLDDRW | 486.00K |
| 60 | 大手臂旋转轴.SLDPRT | 115.25K |
| 61 | 大手臂驱动轴.SLDDRW | 613.50K |
| 62 | 大手臂驱动轴.SLDPRT | 163.98K |
| 63 | 大手臂驱动轴承座.SLDDRW | 516.50K |
| 64 | 大手臂驱动轴承座.SLDPRT | 144.08K |
| 65 | 孔用弹性挡圈A型32.SLDPRT | 114.50K |
| 66 | 底座.SLDDRW | 474.00K |
| 67 | 底座.SLDPRT | 157.26K |
| 68 | 底盘安装板.SLDDRW | 666.00K |
| 69 | 底盘安装板.SLDPRT | 196.19K |
| 70 | 总装图.SLDASM | 3.75M |
| 71 | 总装图.STEP | 14.93M |
| 72 | 旋转轴1.SLDASM | 134.06K |
| 73 | 步进电机1.SLDPRT | 286.89K |
| 74 | 步进电机2.SLDPRT | 219.41K |
| 75 | 步进电机5A.SLDPRT | 164.30K |
| 76 | 步进电机6A.SLDPRT | 235.08K |
| 77 | 电机1法兰.SLDDRW | 735.50K |
| 78 | 电机1法兰.SLDPRT | 136.54K |
| 79 | 电机1轴承座.SLDDRW | 569.50K |
| 80 | 电机1轴承座.SLDPRT | 114.91K |
| 81 | 电机3右夹板.SLDDRW | 671.00K |
| 82 | 电机3右夹板.SLDPRT | 202.83K |
| 83 | 电机3左夹板.SLDDRW | 478.00K |
| 84 | 电机3左夹板.SLDPRT | 125.55K |
| 85 | 电机4左夹板定位柱A.SLDDRW | 400.00K |
| 86 | 电机4左夹板定位柱A.SLDPRT | 61.50K |
| 87 | 电机4架固定板A.SLDDRW | 573.00K |
| 88 | 电机4架固定板A.SLDPRT | 149.37K |
| 89 | 电机4架连接轴A.SLDDRW | 547.00K |
| 90 | 电机4架连接轴A.SLDPRT | 115.27K |
| 91 | 电机4组件.SLDASM | 209.50K |
| 92 | 电机4组件A.SLDASM | 800.18K |
| 93 | 电机5右夹板A.SLDDRW | 957.50K |
| 94 | 电机5右夹板A.SLDPRT | 318.49K |
| 95 | 电机5固定夹板A.SLDDRW | 530.50K |
| 96 | 电机5固定夹板A.SLDPRT | 135.45K |
| 97 | 电机5夹板定位柱A.SLDDRW | 394.50K |
| 98 | 电机5夹板定位柱A.SLDPRT | 61.60K |
| 99 | 电机5夹板架A.SLDASM | 1.39M |
| 100 | 电机5左夹板A.SLDDRW | 775.00K |
| 101 | 电机5左夹板A.SLDPRT | 250.56K |
| 102 | 电机5限位套A.SLDDRW | 370.50K |
| 103 | 电机5限位套A.SLDPRT | 43.69K |
| 104 | 电机6固定架A.SLDDRW | 644.00K |
| 105 | 电机6固定架A.SLDPRT | 160.06K |
| 106 | 电机6组件A.SLDASM | 324.79K |
| 107 | 电机6转接盘A.SLDDRW | 531.00K |
| 108 | 电机6转接盘A.SLDPRT | 153.77K |
| 109 | 电机6转轴2A.SLDDRW | 495.50K |
| 110 | 电机6转轴2A.SLDPRT | 74.15K |
| 111 | 电机6转轴A.SLDDRW | 432.50K |
| 112 | 电机6转轴A.SLDPRT | 75.11K |
| 113 | 电机底座.SLDDRW | 608.50K |
| 114 | 电机底座.SLDPRT | 153.73K |
| 115 | 装配456A.SLDASM | 2.09M |
| 116 | 驱动臂右夹板.SLDDRW | 441.50K |
| 117 | 驱动臂右夹板.SLDPRT | 164.33K |
| 118 | 驱动臂左夹板.SLDDRW | 465.00K |
| 119 | 驱动臂左夹板.SLDPRT | 152.48K |
| 120 | 驱动臂座装配.SLDASM | 1.07M |
| 121 | 驱动臂连杆.SLDDRW | 364.50K |
| 122 | 驱动臂连杆.SLDPRT | 69.10K |
| 123 | 驱动轴承座.sldasm | 164.81K |
| 124 | 0内六角圆柱头螺钉M4×6.SLDPRT | 206.00K |
| 125 | GB/T70.1-2000内六角圆柱头螺钉M5×8.SLDPRT | 204.50K |
| 126 | 内六角圆柱头螺钉M2.5×6.SLDPRT | 100.06K |
| 127 | 内六角圆柱头螺钉M3×10.SLDPRT | 100.48K |
| 128 | 内六角圆柱头螺钉M3×16.SLDPRT | 98.77K |
| 129 | 内六角圆柱头螺钉M3×6.SLDPRT | 101.53K |
| 130 | 内六角圆柱头螺钉M4×12.SLDPRT | 207.00K |
| 131 | 内六角圆柱头螺钉M4×15.SLDPRT | 115.36K |
| 132 | 内六角圆柱头螺钉M4×6.SLDPRT | 102.36K |
| 133 | 内六角圆柱头螺钉M5×10.SLDPRT | 101.93K |
| 134 | 内六角圆柱头螺钉M5×16.SLDPRT | 101.45K |
| 135 | 内六角圆柱头螺钉M5×30.SLDPRT | 98.78K |
| 136 | 内六角圆柱头螺钉M5×8.SLDPRT | 100.90K |
| 137 | 内六角圆柱头螺钉M6×16.SLDPRT | 100.77K |
| 138 | 内六角平圆头螺钉M3×4.SLDPRT | 135.57K |
| 139 | 内六角平圆头螺钉M5×10.SLDPRT | 141.53K |
| 140 | 推力球轴承51205.SLDPRT | 635.00K |
| 141 | 深沟球轴承61907-2Z.SLDPRT | 1.13M |
| 142 | 深沟球轴承6204-2Z.SLDPRT | 992.50K |
| 143 | 轴用弹性挡圈A型20.SLDPRT | 164.00K |
| 144 | 0011.SLDASM | 762.08K |
| 145 | mang.SLDPRT | 172.19K |
| 146 | maqinaarco-caneta.SLDPRT | 157.58K |
| 147 | maqinaarco-depositodefluxo.SLDPRT | 208.74K |
| 148 | maqinaarco-pe_X_E7a1.SLDPRT | 227.93K |
| 149 | 线.SLDPRT | 644.03K |
| 150 | 绕线器.SLDPRT | 89.30K |
| 151 | CROWNWHEEL.1.SLDPRT | 1.36M |
| 152 | GB/T292-94角接触球轴承7002AC.1.SLDPRT | 298.72K |
| 153 | GB/T292-94角接触球轴承7004AC.1.SLDPRT | 299.38K |
| 154 | GB/T70.1-2000内六角圆柱头螺钉M10×25.1.SLDPRT | 112.13K |
| 155 | LARGE.1.SLDPRT | 605.53K |
| 156 | PINION.1.SLDPRT | 785.98K |
| 157 | ROTATINGCAGE.1.SLDPRT | 146.54K |
| 158 | SMALL.1.SLDPRT | 591.52K |
| 159 | 主动轴齿轮.1.SLDPRT | 610.90K |
| 160 | 动力轴承支座.1.SLDPRT | 96.61K |
| 161 | 后轴.1.SLDPRT | 47.37K |
| 162 | 壳.1.SLDPRT | 137.31K |
| 163 | 带底脚无凸缘电机80M.1.SLDPRT | 1.01M |
| 164 | 总装配.SLDASM | 3.04M |
| 165 | 总装配小车.1.SLDASM | 2.20M |
| 166 | 架子.1.SLDPRT | 98.05K |
| 167 | 梁.1.SLDPRT | 327.23K |
| 168 | 电机齿轮..1.SLDPRT | 472.02K |
| 169 | 联轴器.1.SLDPRT | 97.38K |
| 170 | 联轴器2.1.SLDPRT | 84.47K |
| 171 | 舵机.1.SLDPRT | 599.25K |
| 172 | 车壳2.1.SLDPRT | 312.36K |
| 173 | 转向器.1.SLDPRT | 503.17K |
| 174 | 转向器2.1.SLDPRT | 390.68K |
| 175 | 轮子.1.SLDPRT | 153.59K |
| 176 | 零件3-副本.1.SLDPRT | 204.46K |
| 177 | 零件3.1.SLDPRT | 182.88K |
| 178 | 零件4.1.SLDPRT | 69.52K |
| 179 | 齿轮箱2.1.SLDPRT | 91.58K |
| 180 | 6V4.5AhAGMLEAD-ACIDBATTERY.SLDASM | 116.00K |
| 181 | COVER6V4.5AhAGMLEAD-ACIDBATTERY.SLDPRT | 340.98K |
| 182 | MAINBODY6V4.5AhAGMLEAD-ACIDBATTERY.SLDPRT | 119.86K |
此图纸下载需要300金币
立即下载
发布者
残夜
创作: 98
粉丝: 47
加入时间:2023-06-26

模型信息
图纸格式:pdf,dwg,sldasm,sldprt,slddrw,step
文件大小:63.34M
所需金币:300
上传时间:2025-07-02 23:06:07
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2024
标签
无轨焊接机器人
焊接机器人
焊接机
无轨焊接
无轨焊接机
图纸简介
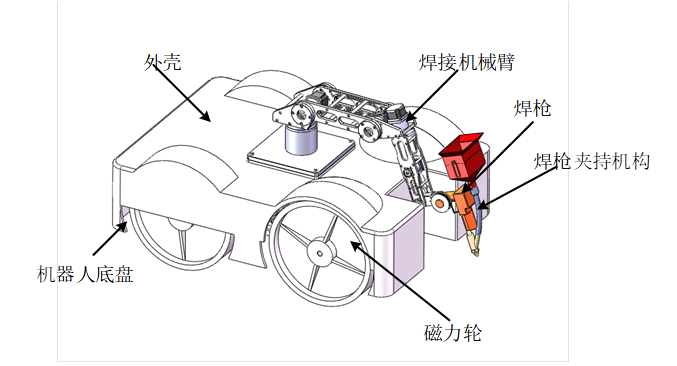
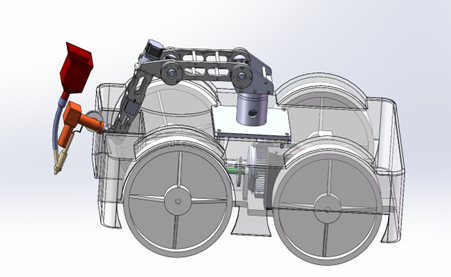
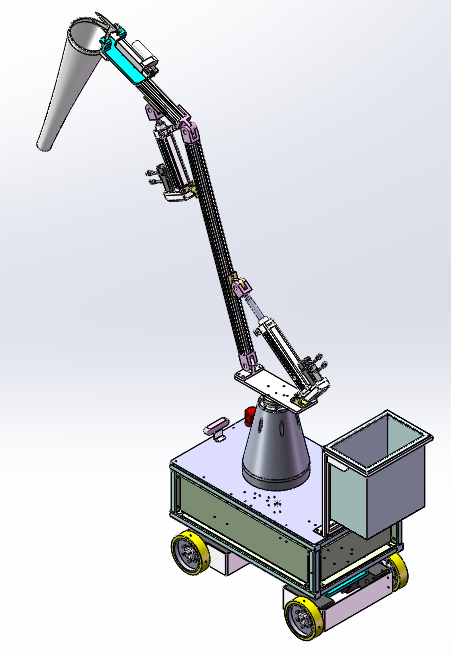
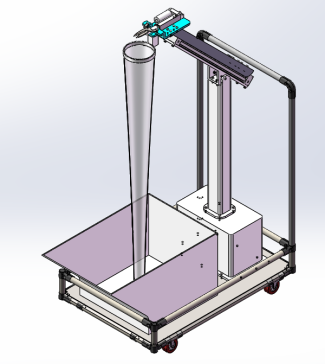
本设计的总体方案设计包括焊接机械臂、磁吸附行走机构及传动系统的结构设计与驱动电机选型。磁吸附行走底盘采用永磁吸附方式,结合差速驱动与行星减速系统,实现了机器人在垂直、曲面等复杂工况下的稳定吸附与移动。焊接机械臂采用六自由度关节结构,具备较强的路径灵活性与空间适应能力。
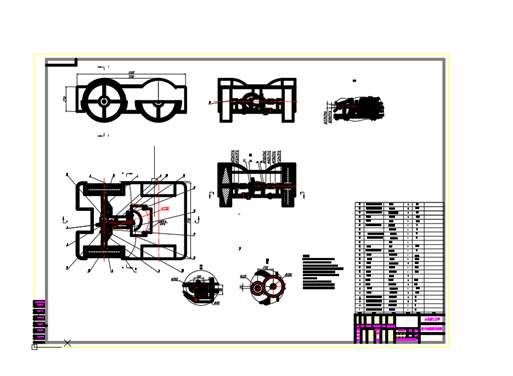
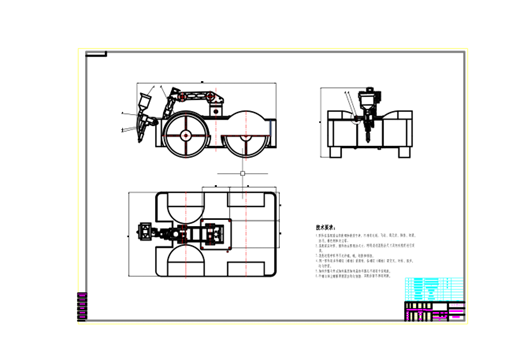
本文件为机械本科,包含三维二维及论文,三维为SolidWorks格式,二维为CAD,论文有2.2w字数。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


0.png)
0.jpg)
0.jpg)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

