登录注册
UG机器人及运动仿真(ID:2609892)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17574716174662.zip | 7.02M |
| 2 | 1.prt | 166.99K |
| 3 | 2.prt | 141.71K |
| 4 | R4.prt | 137.45K |
| 5 | _model10.prt | 103.25K |
| 6 | _model11.prt | 101.56K |
| 7 | _model4.prt | 124.92K |
| 8 | _model5.prt | 232.39K |
| 9 | _model6.prt | 492.74K |
| 10 | _model7.prt | 253.93K |
| 11 | _model8.prt | 1.98M |
| 12 | _model9.prt | 162.16K |
| 13 | 基架.prt | 265.00K |
| 14 | 大腿驱动杆R1.prt | 201.77K |
| 15 | 大腿驱动电机.prt | 172.92K |
| 16 | 小腿.prt | 190.33K |
| 17 | 小腿R3.prt | 253.95K |
| 18 | 小腿驱动电机.prt | 176.03K |
| 19 | 带1.prt | 148.07K |
| 20 | 带2.prt | 162.95K |
| 21 | 带轮1.prt | 165.58K |
| 22 | 带轮2.prt | 164.98K |
| 23 | 带轮3.prt | 163.41K |
| 24 | 机器人装配.prt | 373.76K |
| 25 | 机器人装配_motion1-solution_2.minf | 288.13K |
| 26 | 机器人装配_motion1-solution_2.minp | 151.43K |
| 27 | 机器人装配_motion1-solution_2.mres | 1.51M |
| 28 | 机器人装配_motion1.sim | 444.03K |
| 29 | 毕设右腿.prt | 258.10K |
| 30 | 电机1.prt | 199.96K |
| 31 | 腰1.prt | 233.16K |
| 32 | 腰2.prt | 232.15K |
| 33 | 腰3.prt | 159.05K |
| 34 | 腰4.prt | 136.30K |
| 35 | 腰5.prt | 145.75K |
| 36 | 腰6.prt | 253.16K |
| 37 | 腰8.prt | 195.65K |
| 38 | 腰9.prt | 126.84K |
| 39 | 腰管节.prt | 152.57K |
| 40 | 装配左腿.prt | 244.34K |
| 41 | 足端.prt | 160.79K |
| 42 | 跨.prt | 249.13K |
| 43 | 跨关节驱动电机.prt | 162.80K |
| 44 | 躯干1.prt | 340.31K |
| 45 | 轮子.prt | 135.92K |
| 46 | 轮子驱动电机.prt | 169.67K |
| 47 | 轴1.prt | 139.31K |
| 48 | 轴2.prt | 110.76K |
| 49 | 轴3.prt | 103.71K |
此图纸下载需要96金币
立即下载
发布者
一品三维工程师
创作: 302
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:prt
文件大小:7.19M
所需金币:96
上传时间:2025-09-10 10:33:41
是否可编辑:可修改,包括参数
版本:UG 12
标签
UG建模
机器人
图纸简介
模型明细
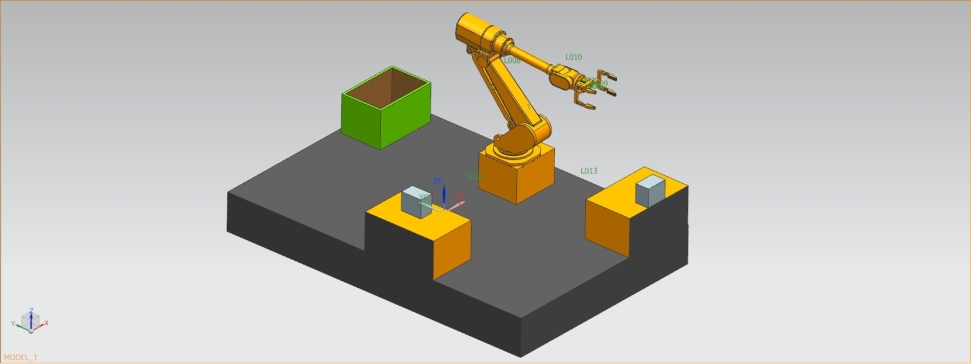
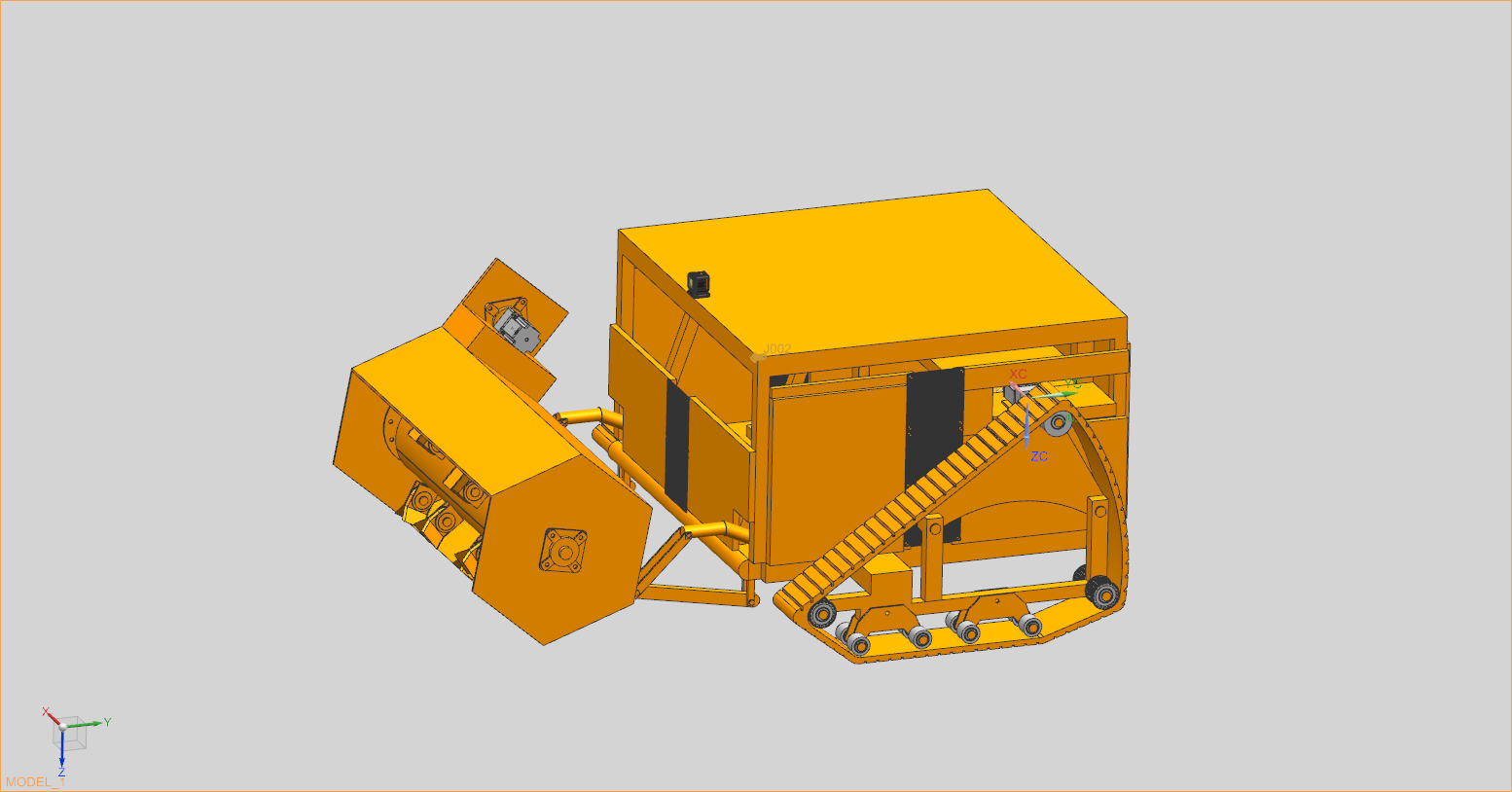
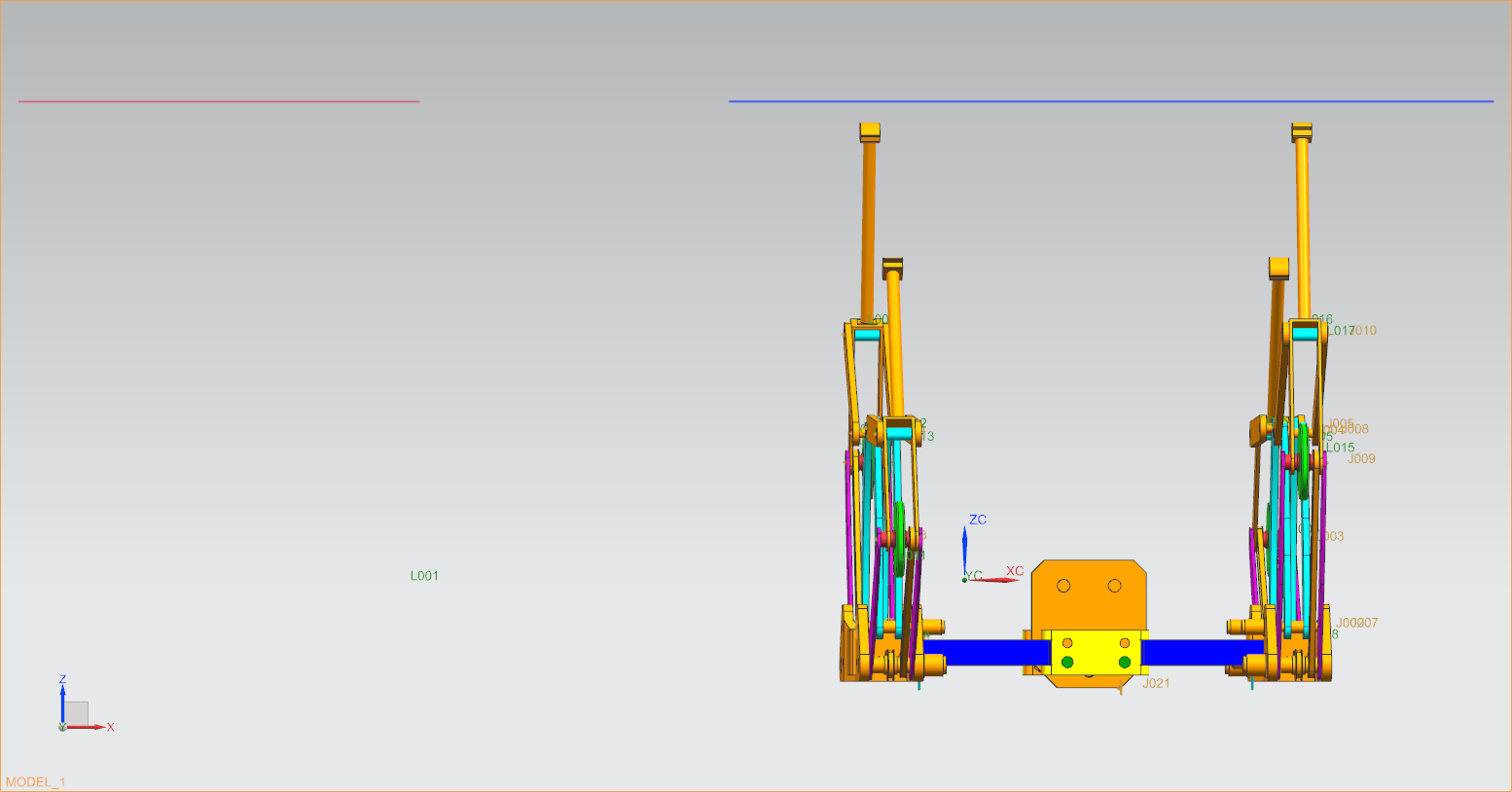
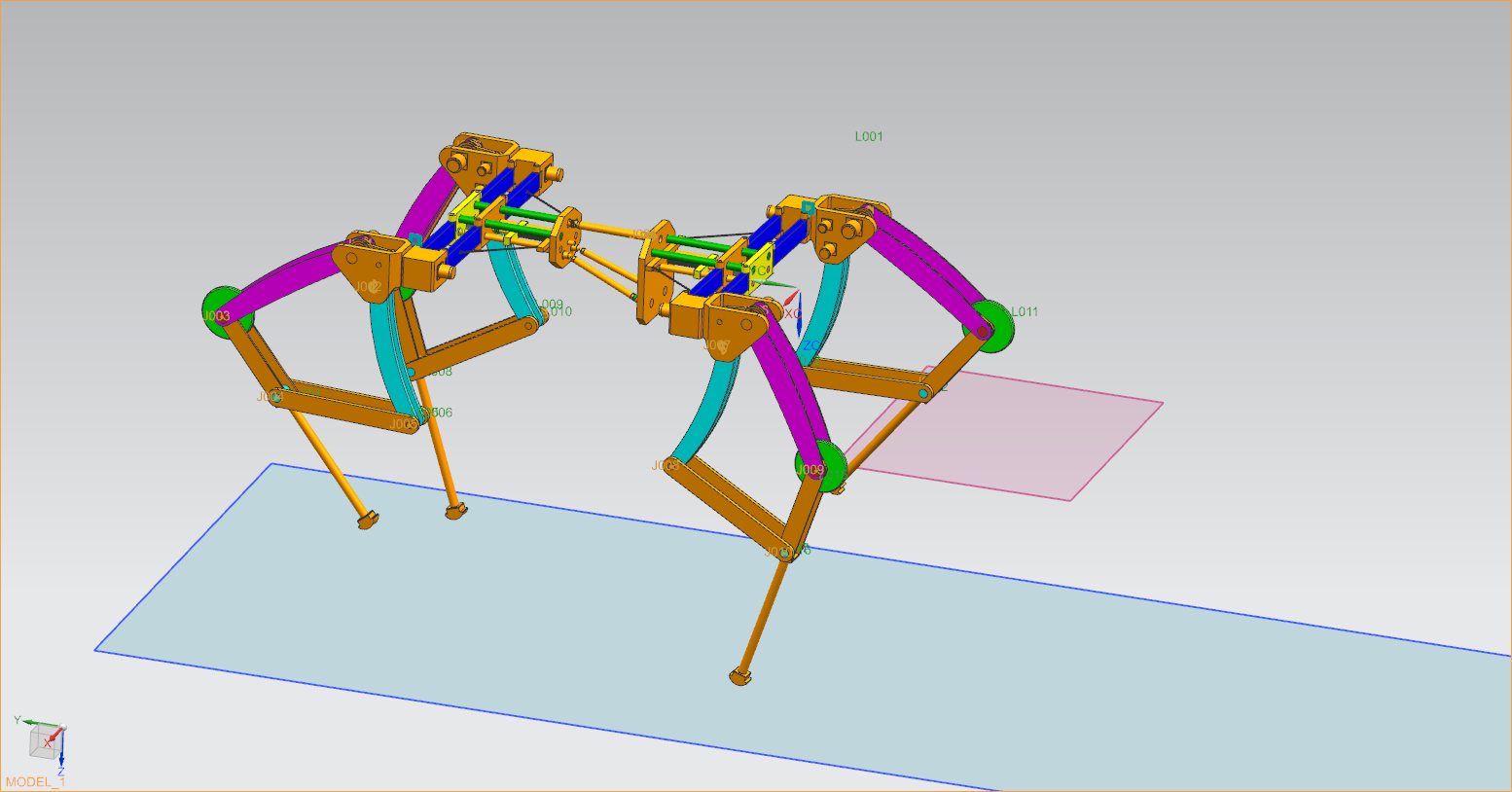
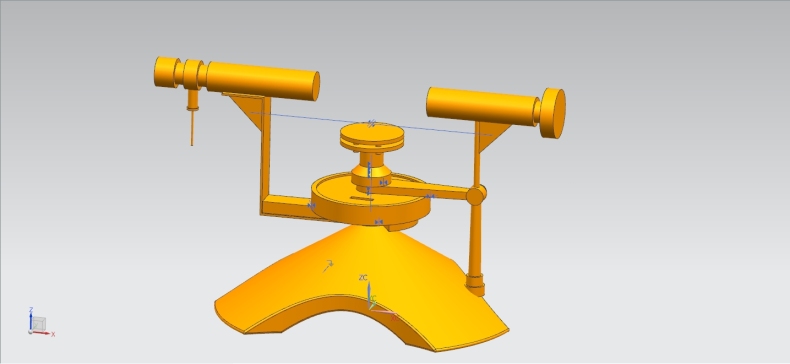
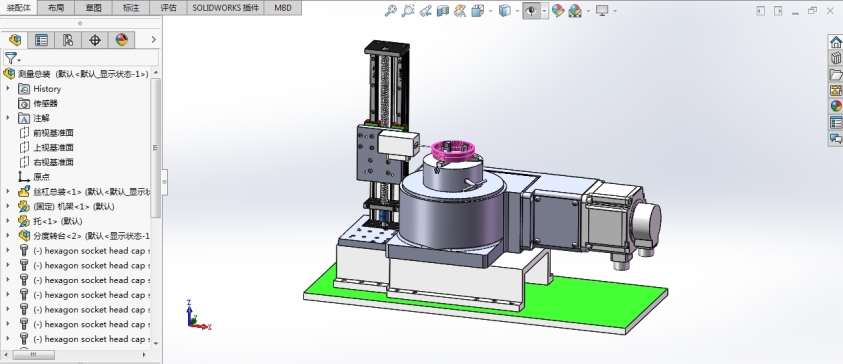
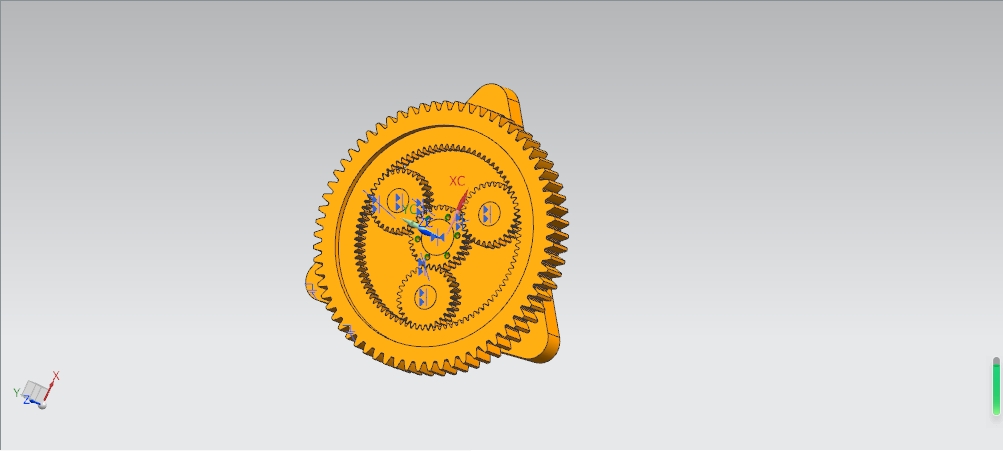
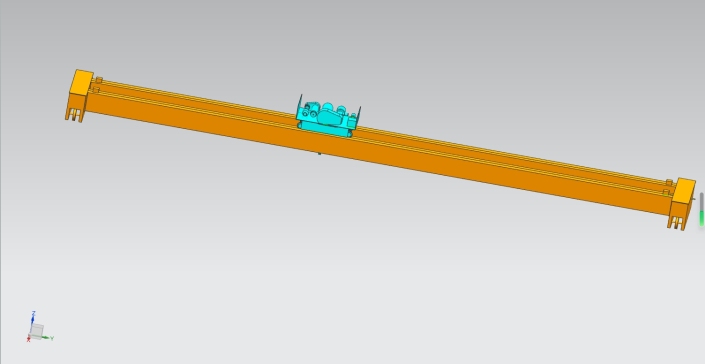
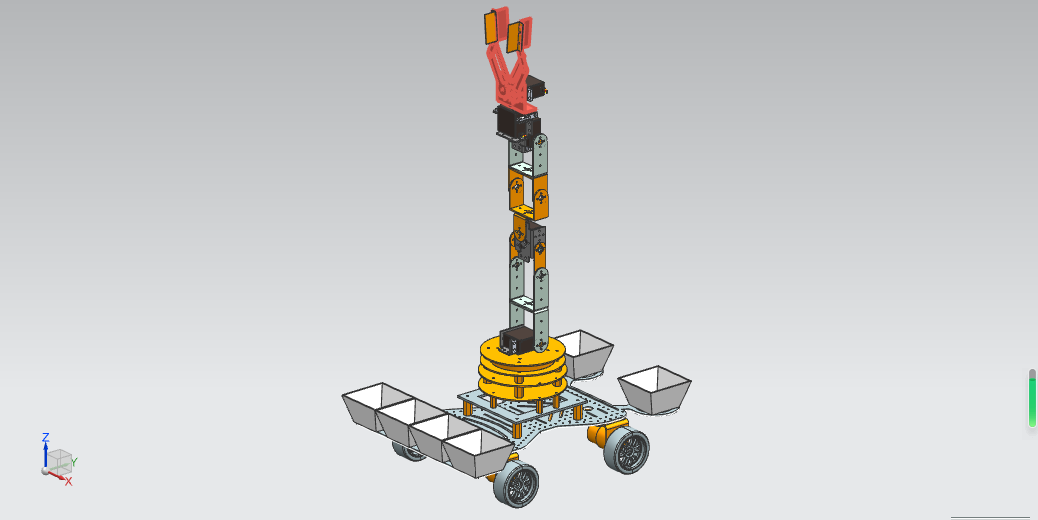
机器人模型含 6 轴机械臂、底座、末端执行器(抓手 / 吸盘)、控制系统舱及传感器模块。技术要求
机械臂重复定位精度 ±0.02mm,最大负载≥5kg,关节旋转范围 ±180°。
运动响应时间≤0.1s,连续运行误差≤±0.05mm,适配 0.1-1m 作业半径。
仿真中无部件干涉,轨迹与预设路径偏差≤0.03mm,支持 24 小时连续作业模拟。
设计原理
控制系统接收指令,驱动各关节电机协同运动,通过运动学算法规划路径,传感器实时反馈位置与力信号,调整动作精度,仿真验证运动协调性与作业可行性。
用途
适用于电子装配、汽车制造、物流分拣等场景,实现自动化作业,提升生产效率。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0_0_364.png)
0.png)
0.jpg)
0.png)