
登录注册
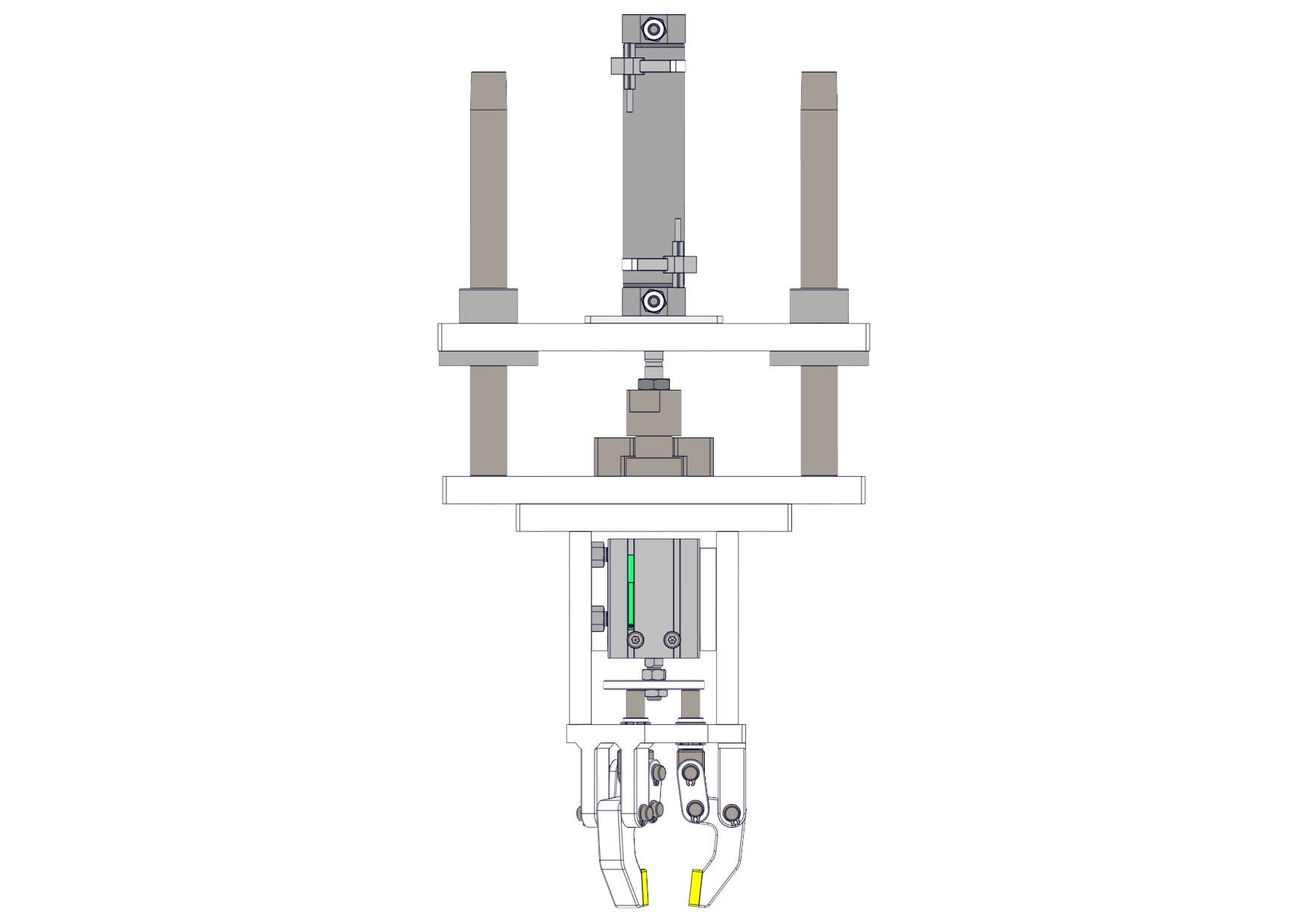
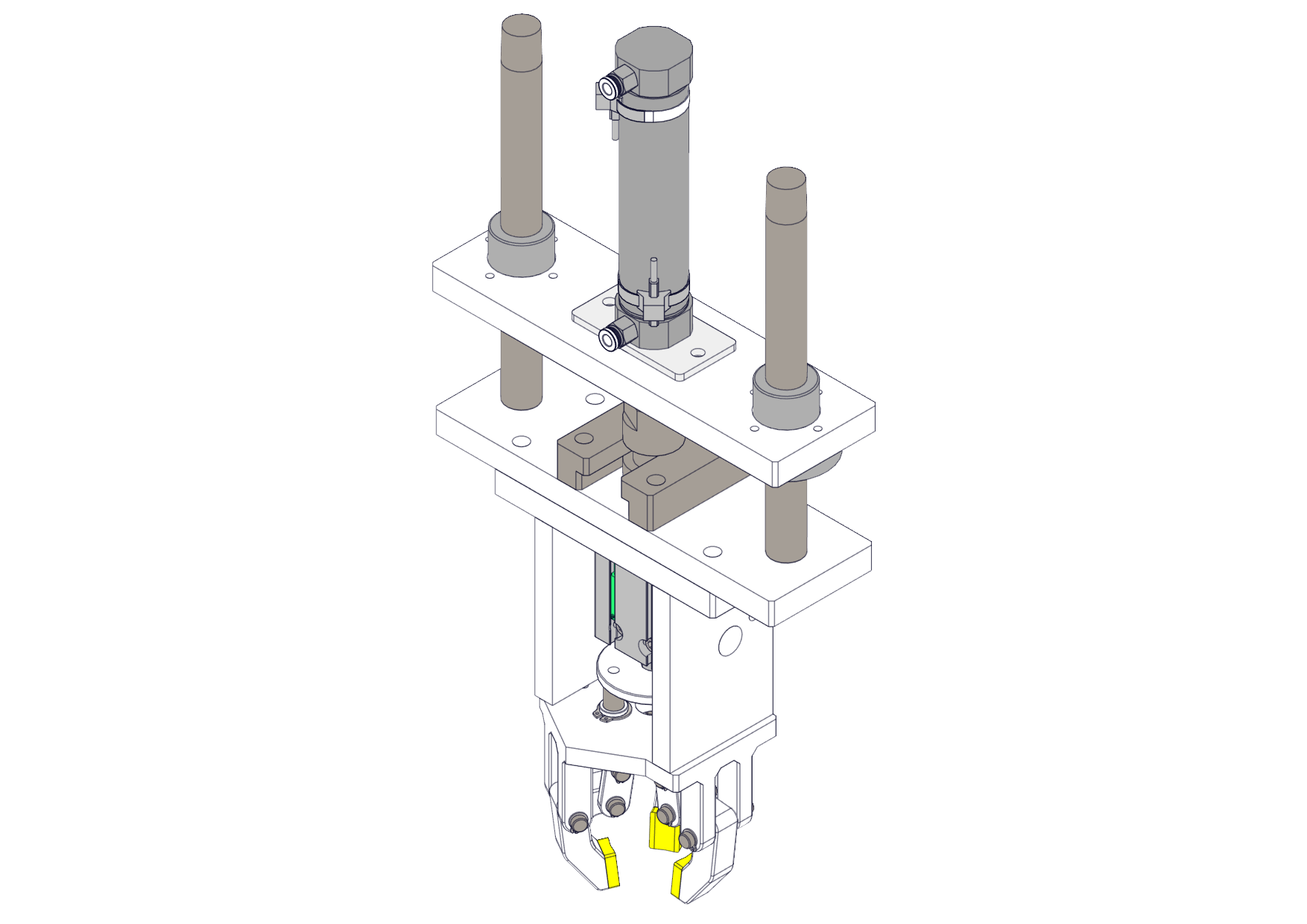
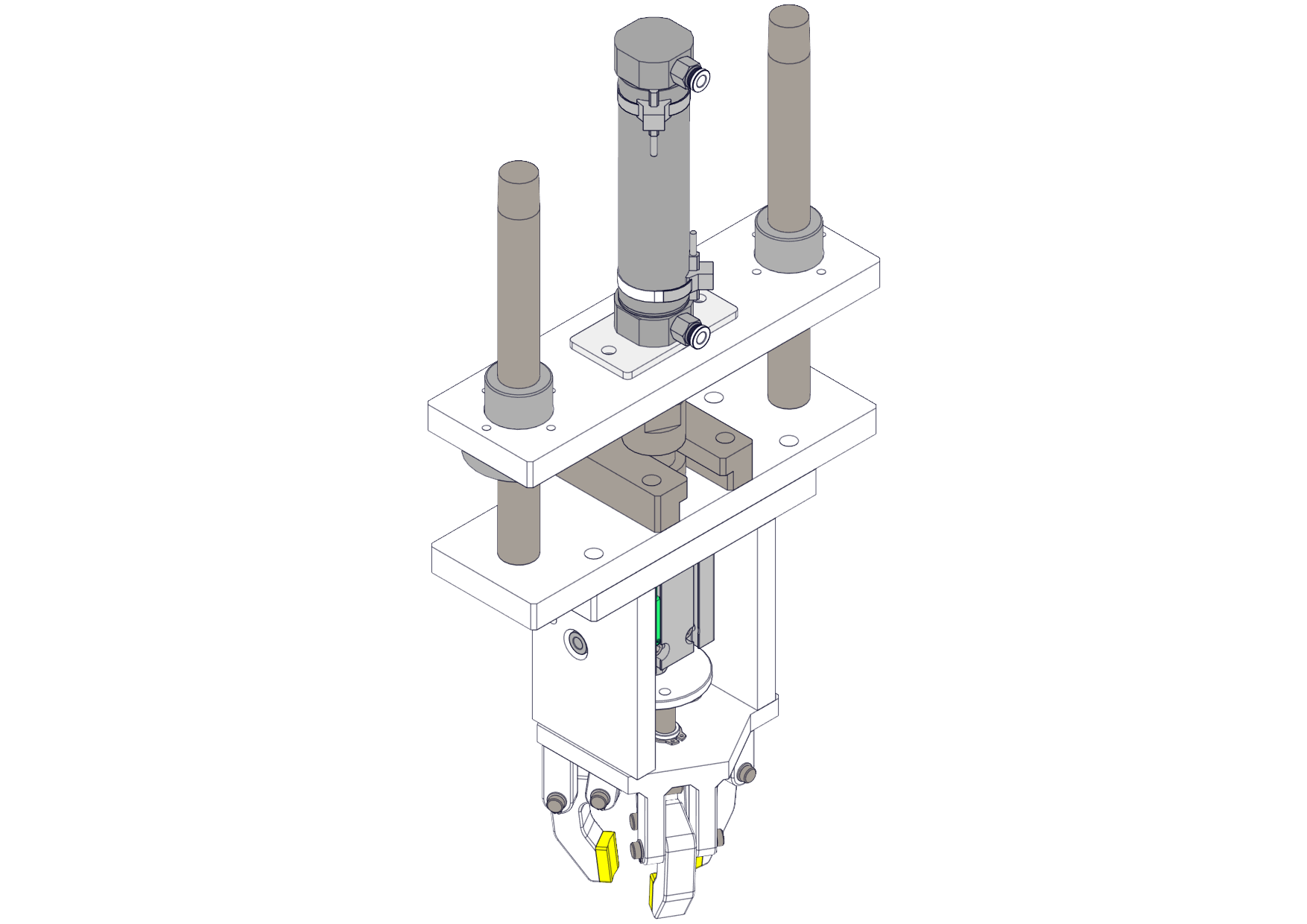
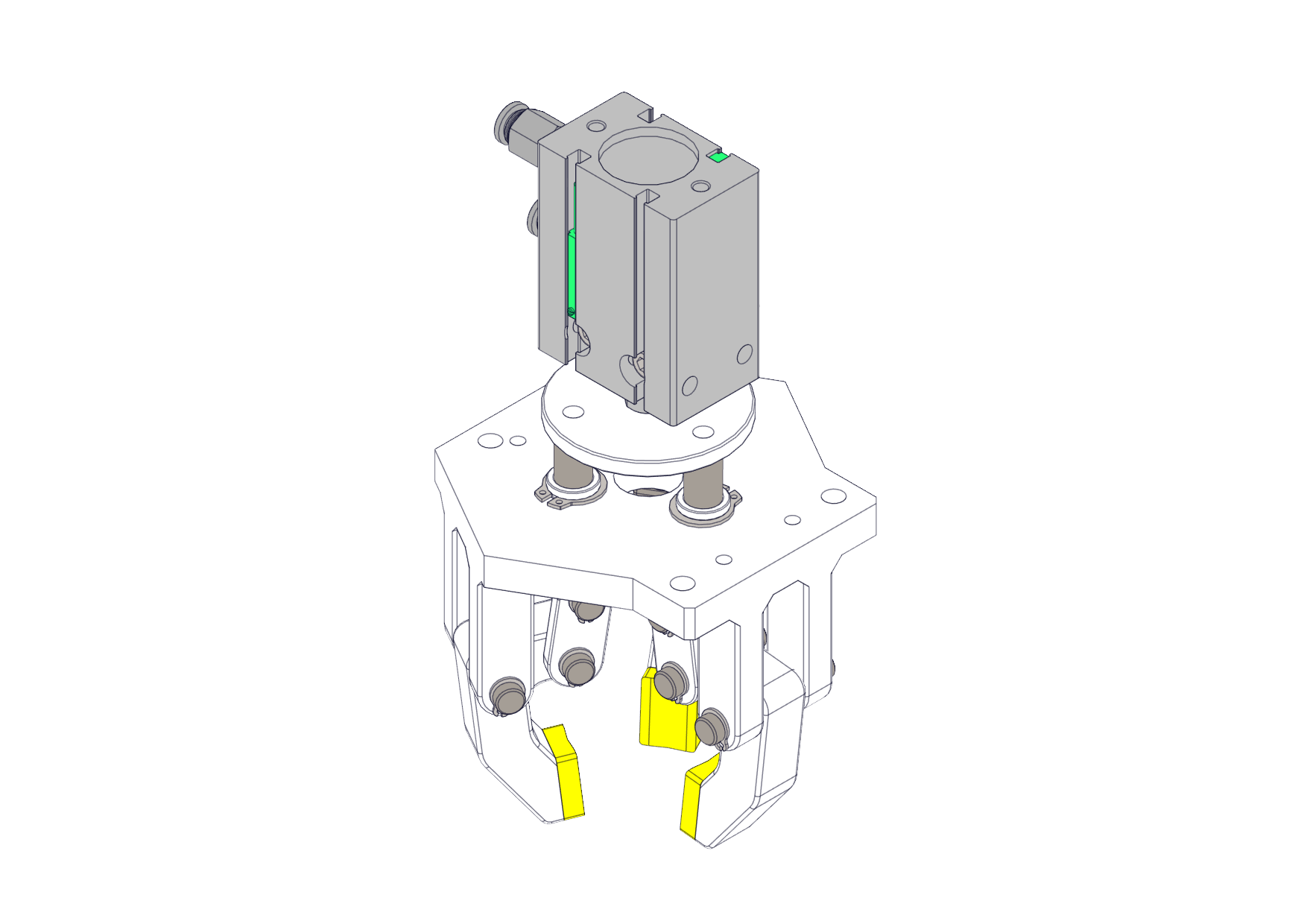
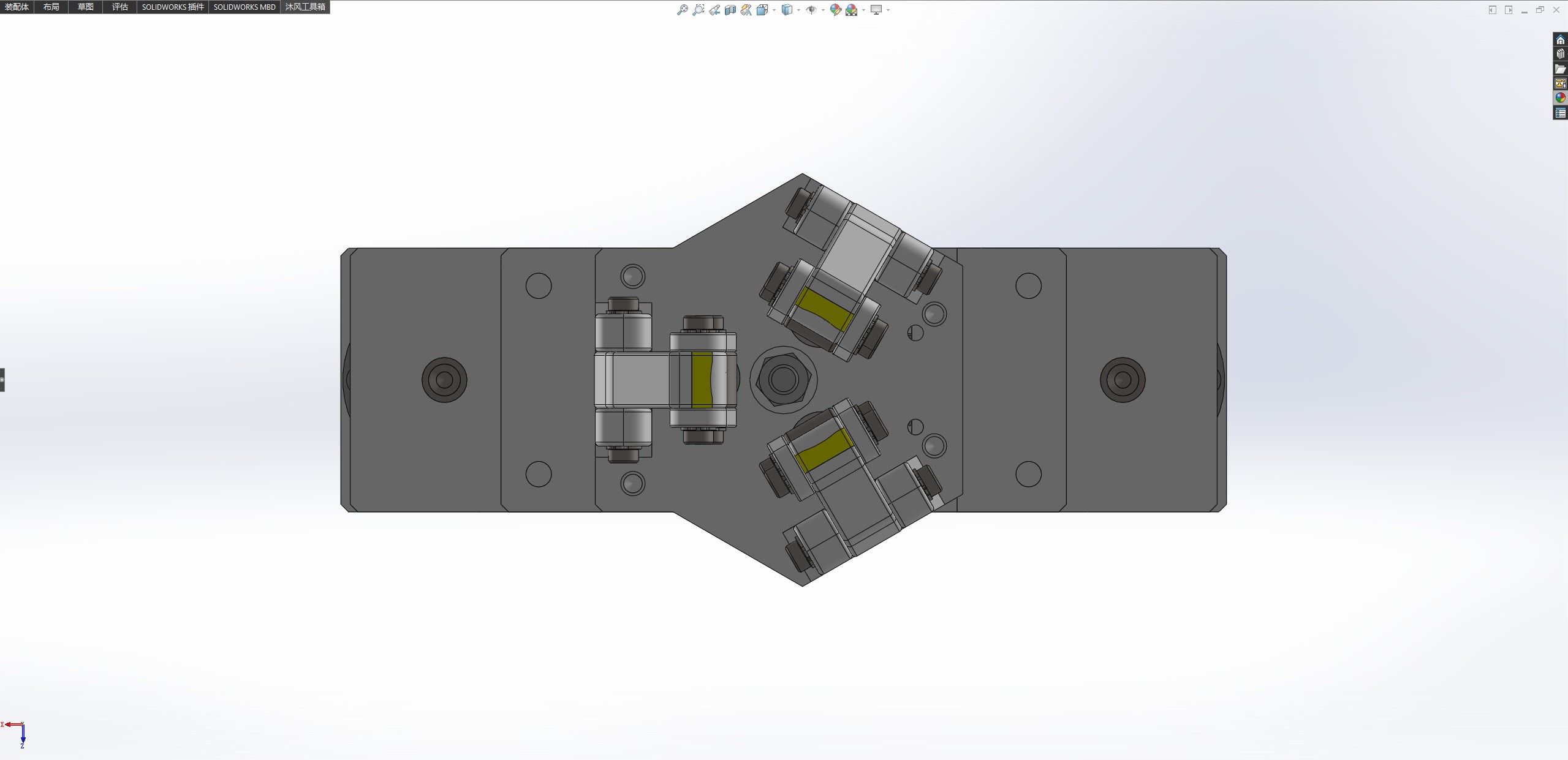
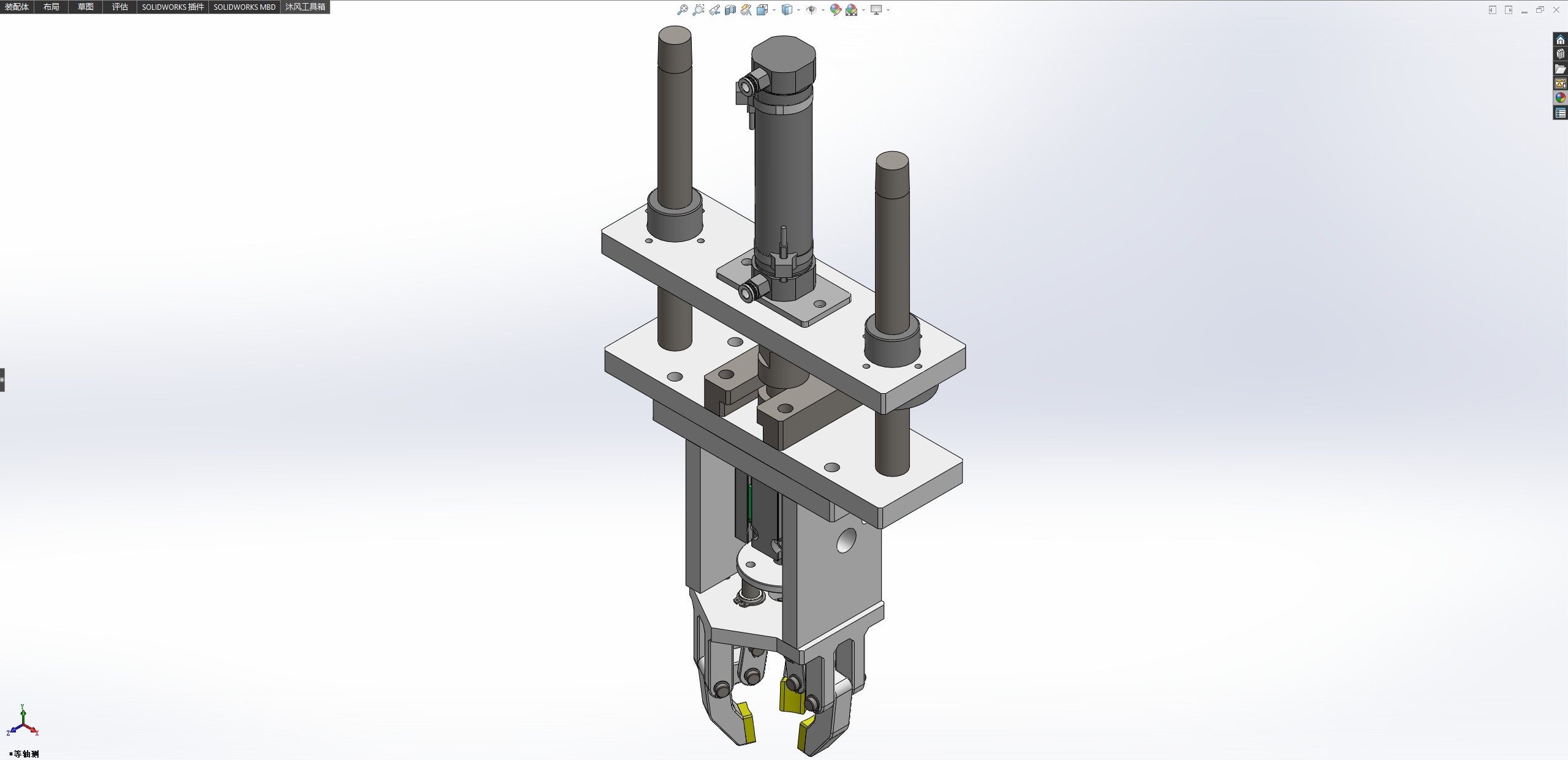
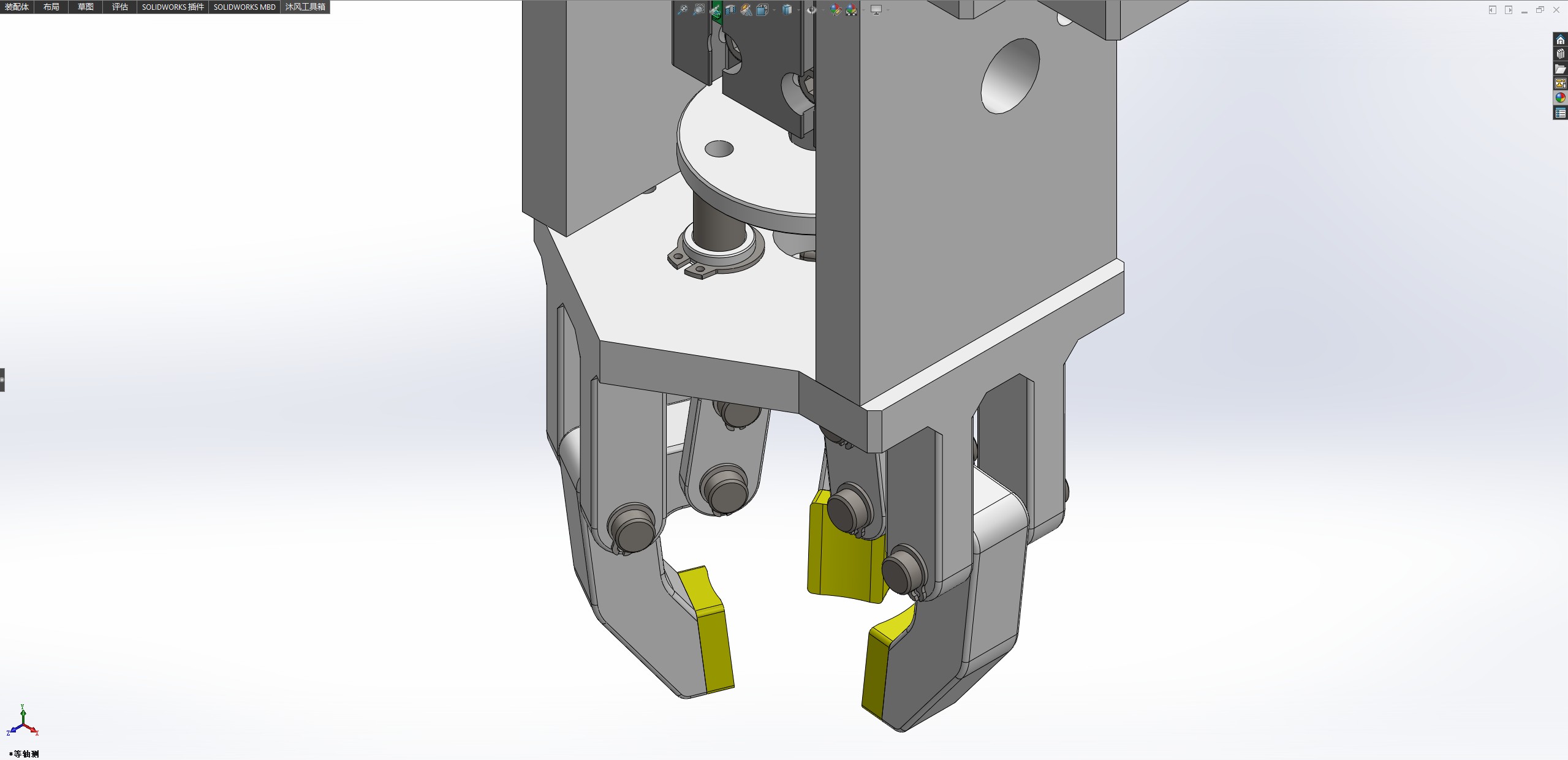
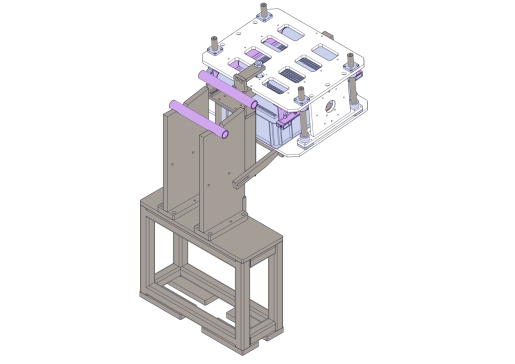
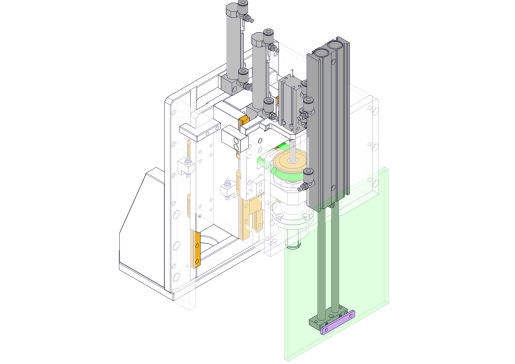
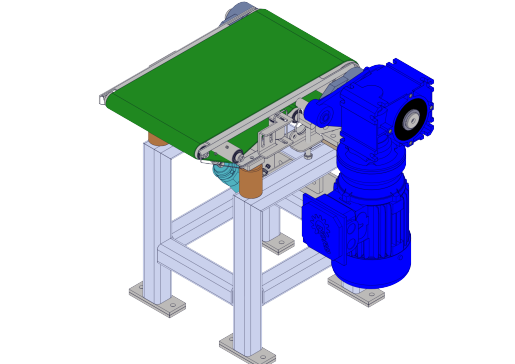
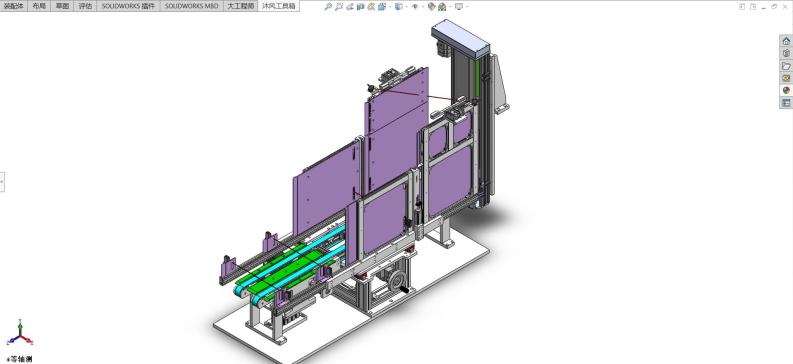
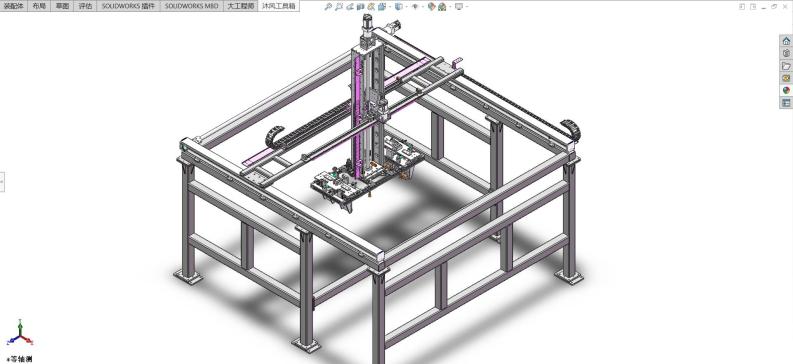
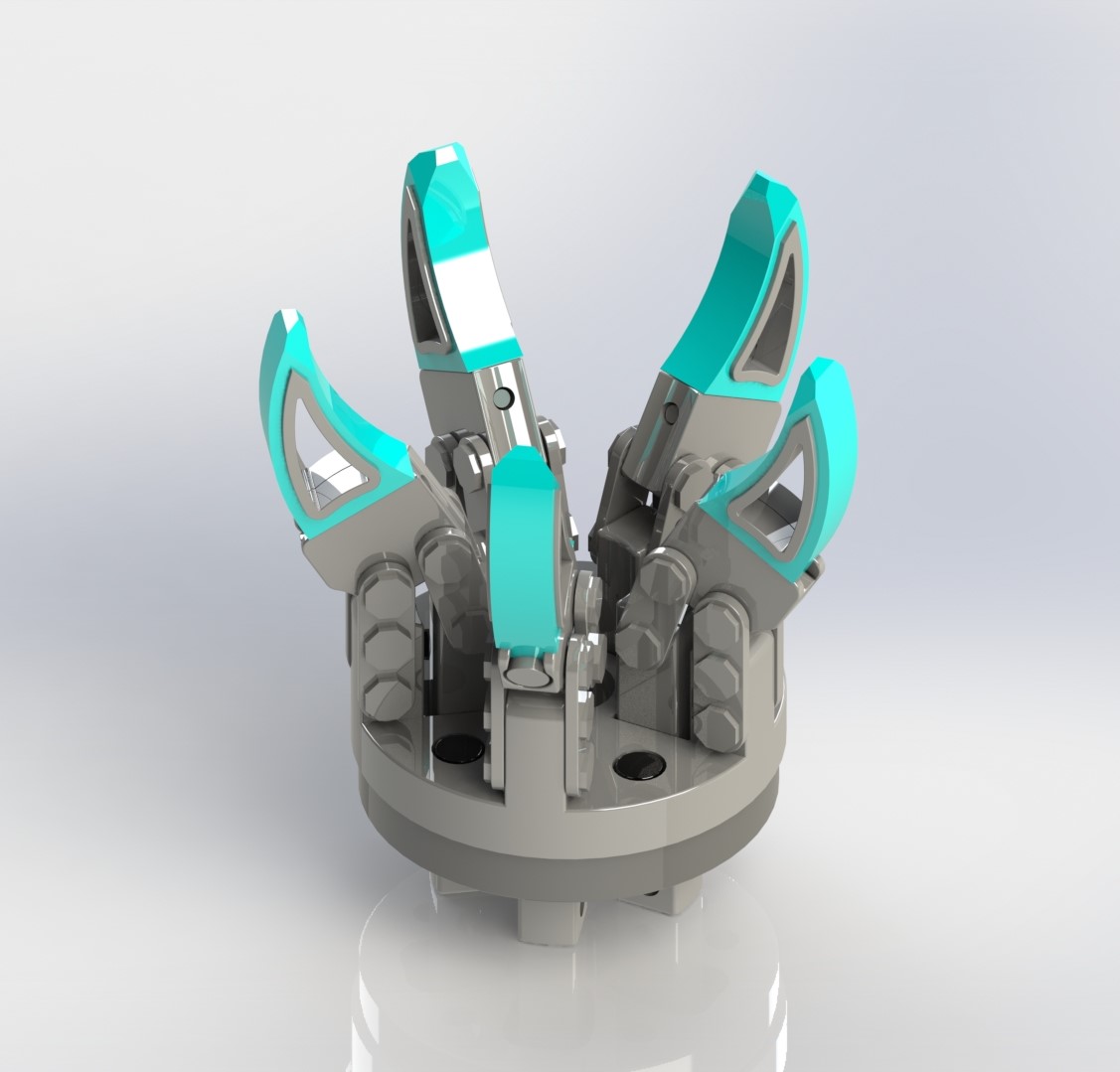
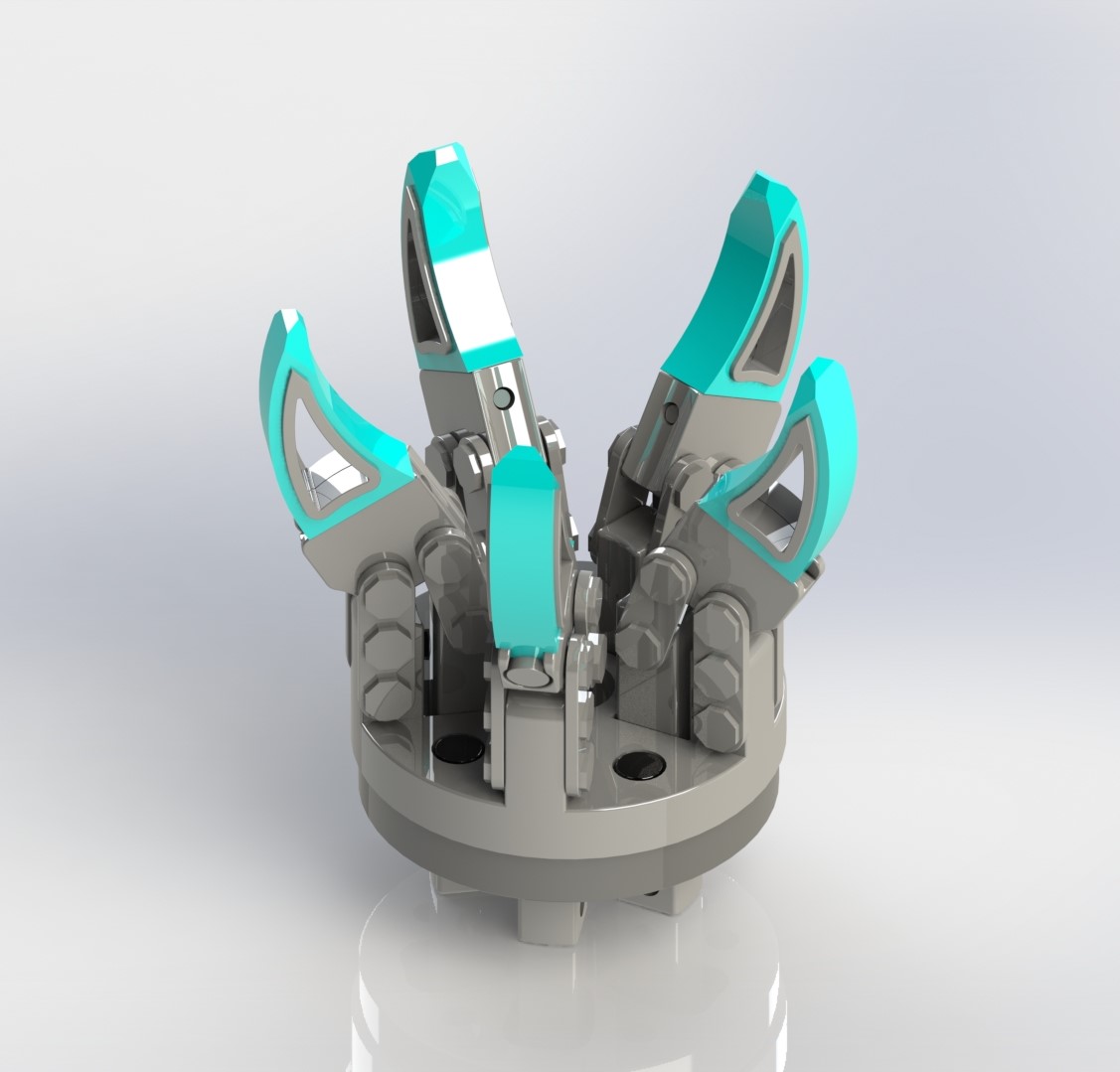
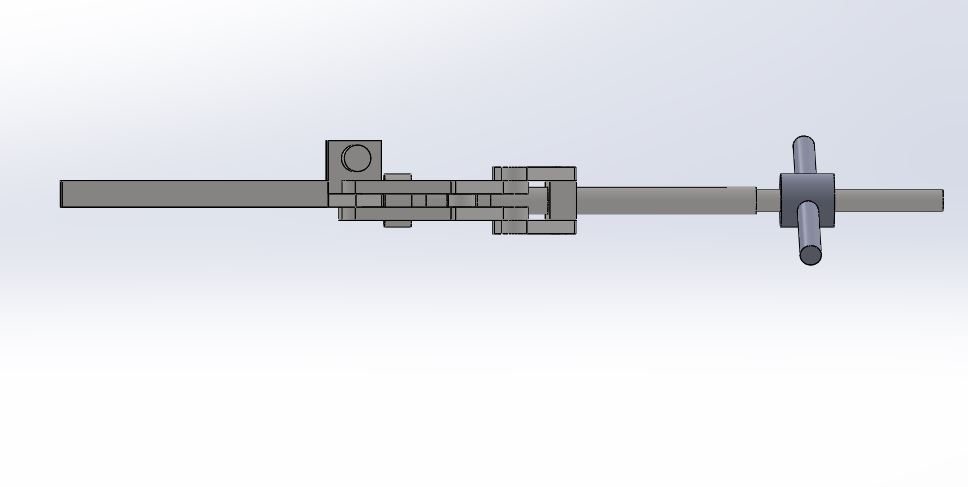
基于连杆原理的夹爪机构(ID:2736002)
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17606729981775.zip | 3.18M |
| 2 | AirTAC多固型气缸MD25x15S.sldasm | 24.25K |
| 3 | AirTAC迷你气缸MF32x100SU.sldasm | 24.66K |
| 4 | GB╱T6173-2015[六角薄螺母细牙M8×1].SLDPRT | 61.13K |
| 5 | GB╱T70.1-2008[内六角圆柱头螺钉M5×35].sldprt | 27.09K |
| 6 | GB╱T894-2017[轴用弹性挡圈A型d0≥1014].sldprt | 27.37K |
| 7 | GB╱T894.1-1986[轴用弹性挡圈A型d0≤98].sldprt | 26.96K |
| 8 | JGCK111-000基于连杆原理的夹爪机构.SLDASM | 811.89K |
| 9 | JGCK111-000基于连杆原理的夹爪机构.smg | 270.16K |
| 10 | JGCK111-000基于连杆原理的夹爪机构.STEP | 3.50M |
| 11 | JGCK111-000基于连杆原理的夹爪机构.x_t | 1.24M |
| 12 | JGCK111-001.sldprt | 29.95K |
| 13 | JGCK111-002.sldprt | 29.11K |
| 14 | JGCK111-003.sldprt | 25.15K |
| 15 | JGCK111-004.sldprt | 32.50K |
| 16 | JGCK111-005.sldprt | 26.32K |
| 17 | JGCK111-006.sldprt | 30.42K |
| 18 | JGCK111-007.sldprt | 28.62K |
| 19 | JGCK111-008.sldprt | 25.02K |
| 20 | JGCK111-009.sldprt | 29.83K |
| 21 | JGCK111-010.sldprt | 66.93K |
| 22 | JGCK111-011.sldprt | 37.12K |
| 23 | JGCK111-012.sldprt | 25.36K |
| 24 | JGCK111-013.sldprt | 28.05K |
| 25 | JGCK111-014.sldprt | 25.43K |
| 26 | JGCK111-015.sldprt | 26.71K |
| 27 | JGCK111-016.sldprt | 47.36K |
| 28 | JGCK111-017.sldprt | 25.73K |
| 29 | MD25x15S01.sldprt | 106.50K |
| 30 | MD25x15S02.sldprt | 26.06K |
| 31 | MD25x15S03.sldprt | 33.26K |
| 32 | MD25x15S04.sldprt | 31.80K |
| 33 | MD25x15S05.sldprt | 50.67K |
| 34 | MF32x100SU01.sldprt | 124.32K |
| 35 | MF32x100SU02.sldprt | 25.83K |
| 36 | MF32x100SU03.sldprt | 30.95K |
| 37 | MF32x100SU04.sldprt | 25.49K |
| 38 | MF32x100SU05.sldprt | 31.28K |
| 39 | MF32x100SU06.sldprt | 41.92K |
| 40 | MF32x100SU07.sldprt | 50.41K |
| 41 | 怡合达直线轴承LME03-d20.sldprt | 27.97K |
此图纸下载需要30金币
立即下载
发布者
幻现时空
创作: 342
粉丝: 15
加入时间:2024-12-15

模型信息
图纸ID:2736002
图纸格式:sldasm,sldprt,step,x_t
文件大小:3.26M
所需金币:30
上传时间:2025-10-17 11:50:54
是否可编辑:可修改,不包括参数
软件版本:SOLIDWORKS 2018
标签
连杆机构
夹爪机构
图纸简介
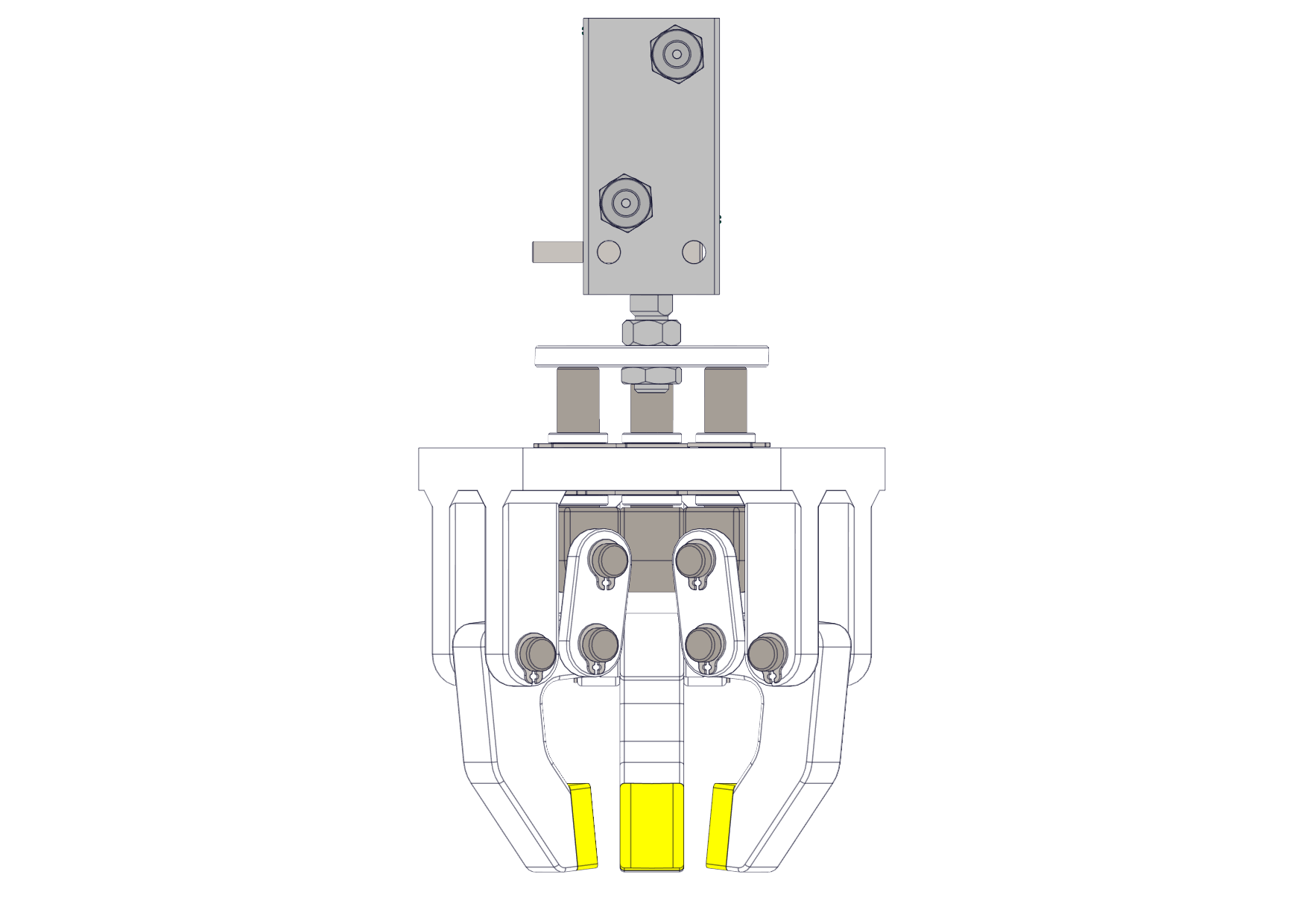
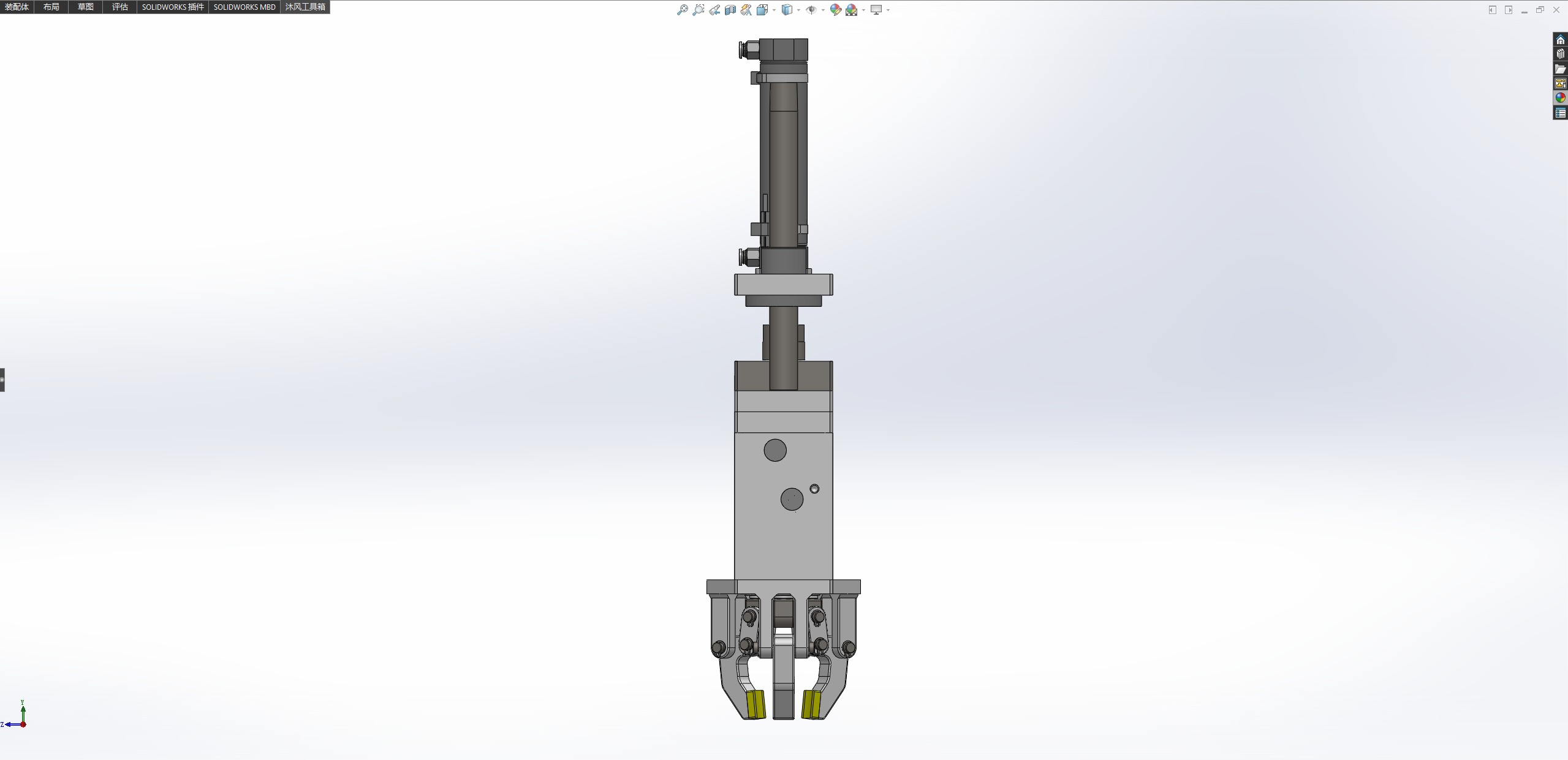
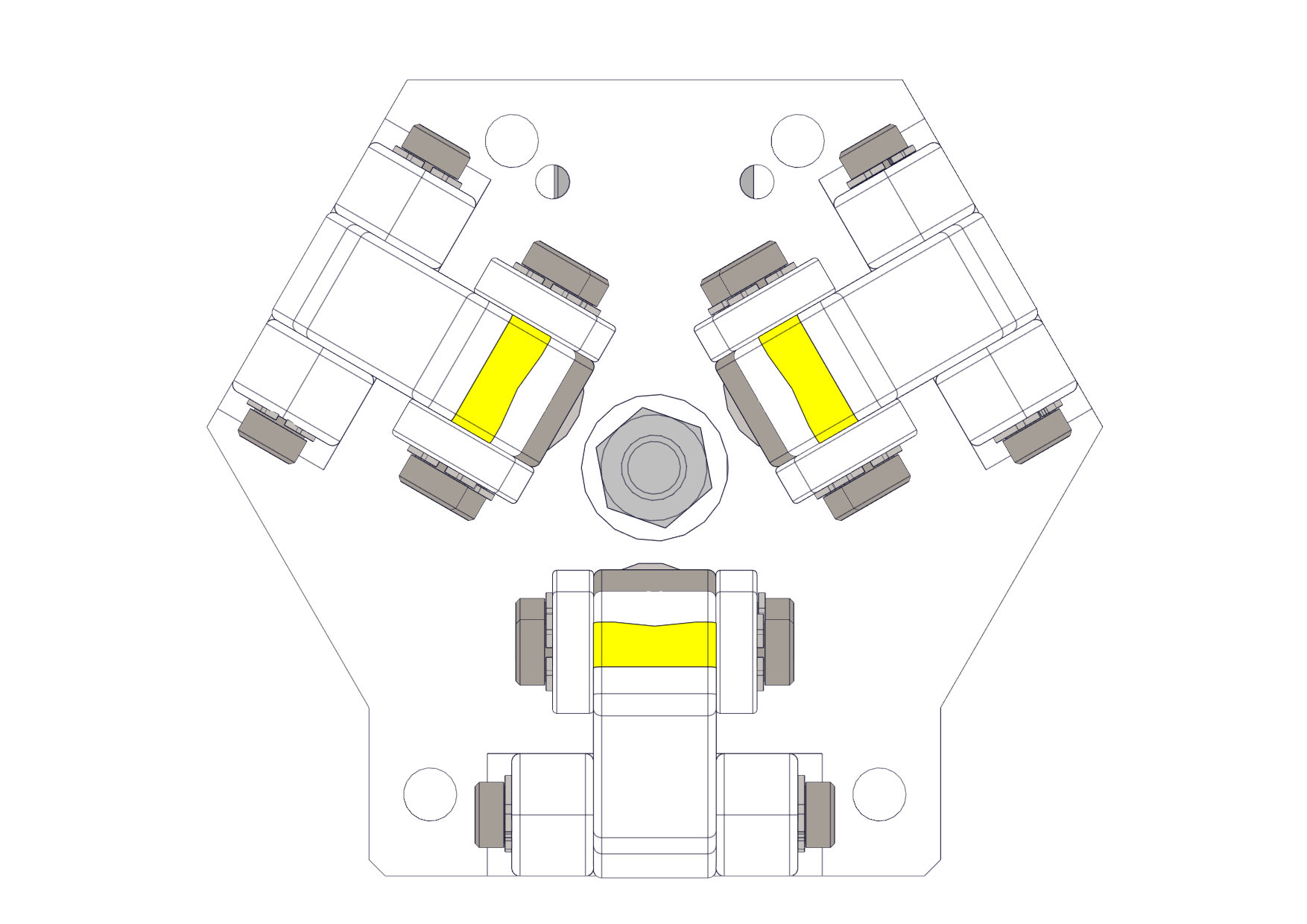
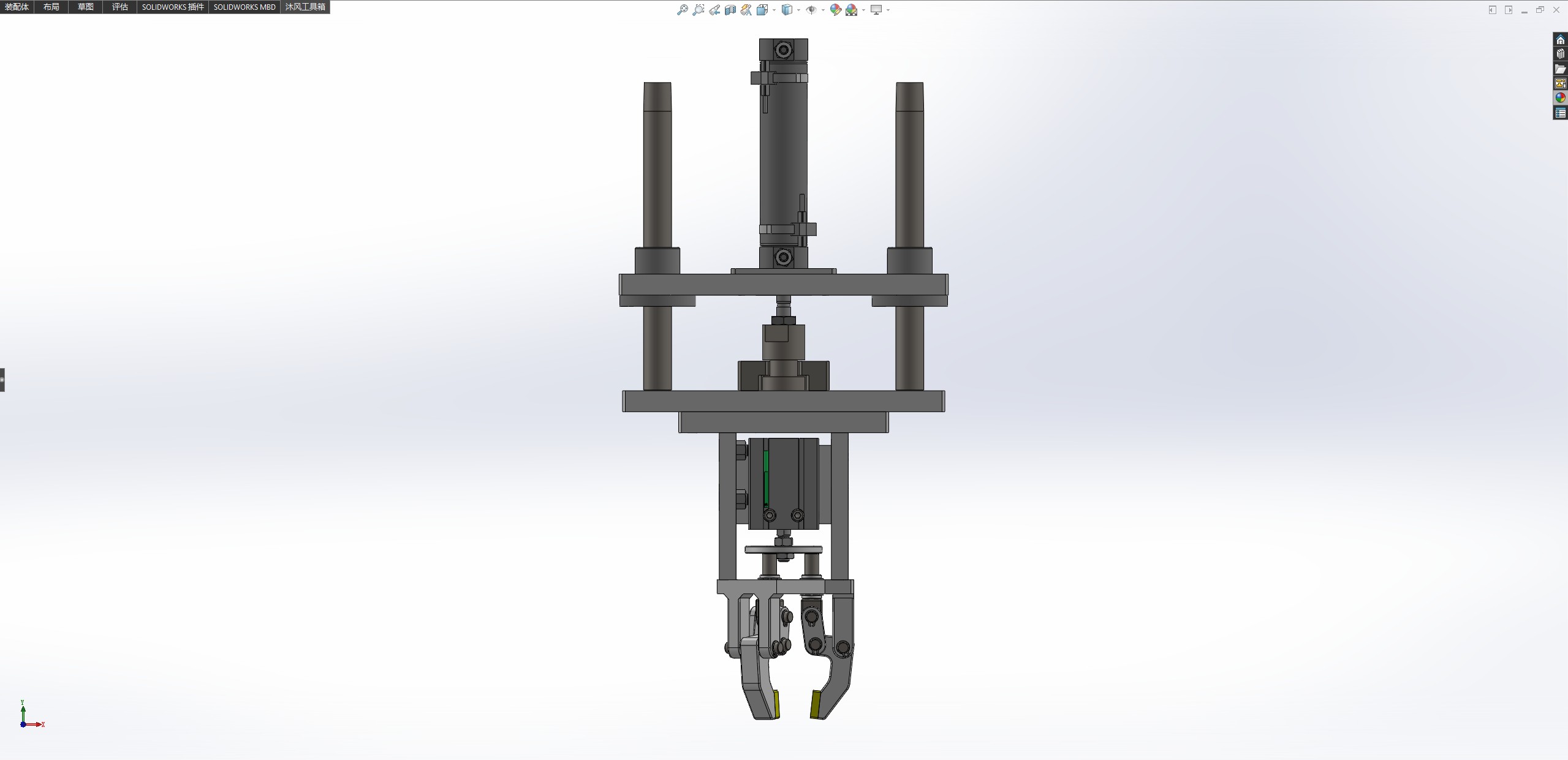
基于连杆原理的夹爪机构主要是一种利用连杆机构实现夹持动作的机械装置,其核心在于通过刚性连杆的相对运动,将驱动源的输入运动转化为夹爪的开合动作。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
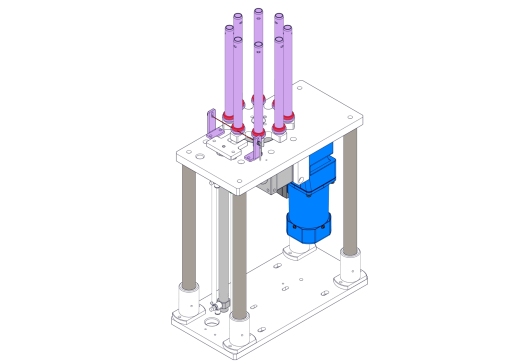
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

