登录注册
机器人羊角抓手平行和对中(ID:405702)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 16701486647842.zip | 425.05K |
| 2 | 主视图.jpg | 29.50K |
| 3 | 侧视图.jpg | 19.75K |
| 4 | 俯视图.jpg | 20.34K |
| 5 | 左视图.jpg | 30.17K |
| 6 | 机器人羊角抓手平行和对中.stp | 2.40M |
此图纸下载需要45金币
立即下载
发布者
落后的皮皮虾
创作: 52093
粉丝: 368
加入时间:2022-09-02

模型信息
图纸格式:stp
文件大小:435.26KB
所需金币:45
上传时间:2022-12-04 18:11:05
是否可编辑:可修改,不包括参数
版本:STEP
标签
机器人
羊角
抓手
对中
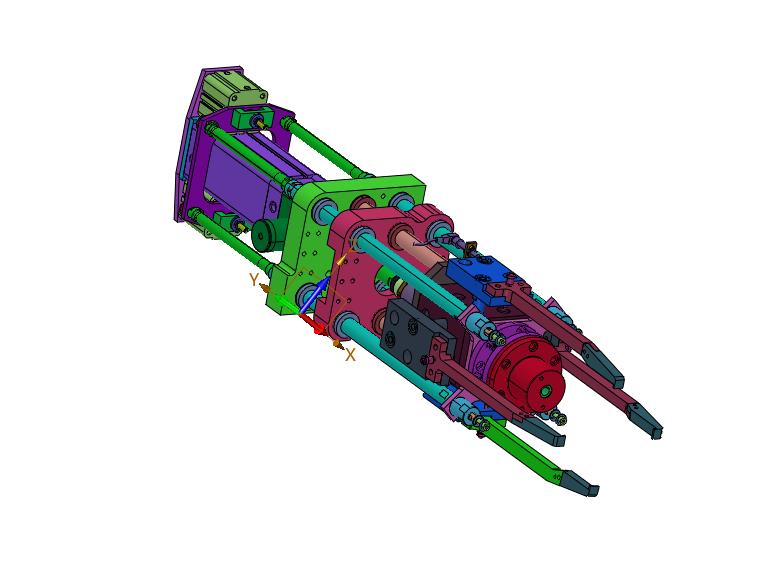
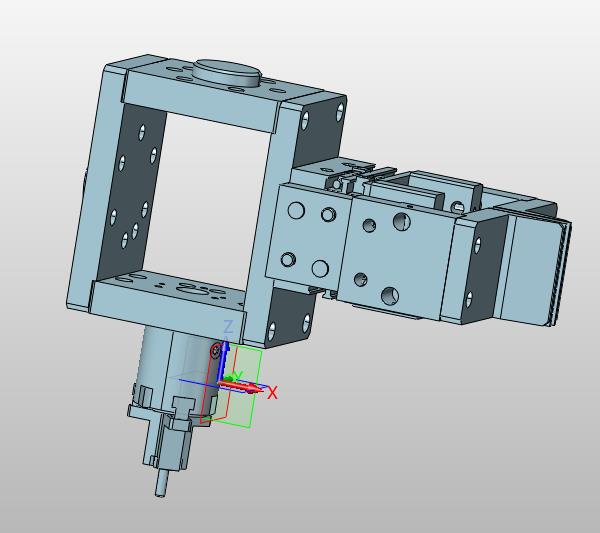
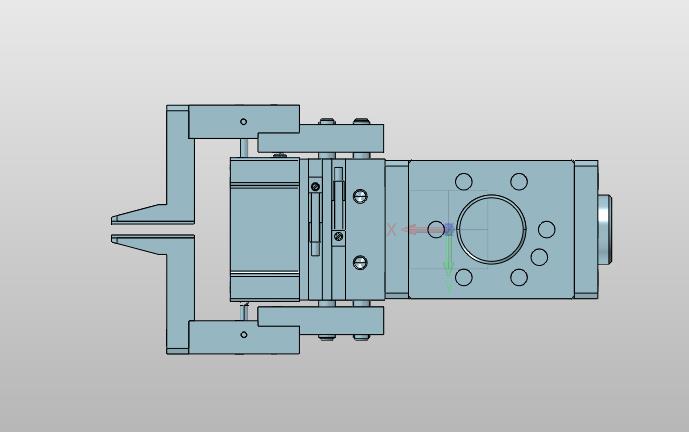
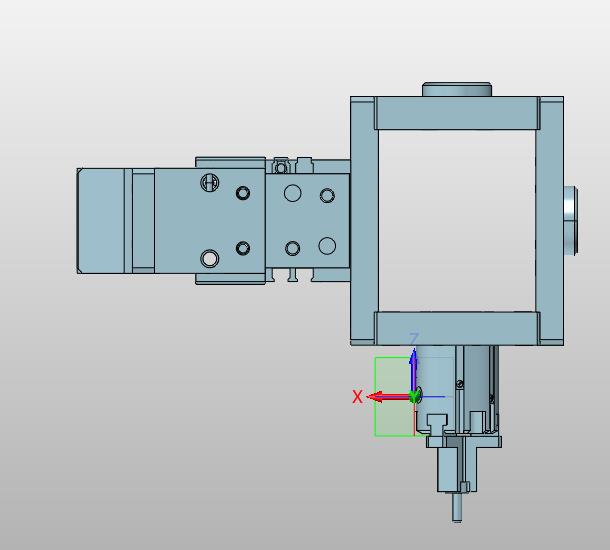
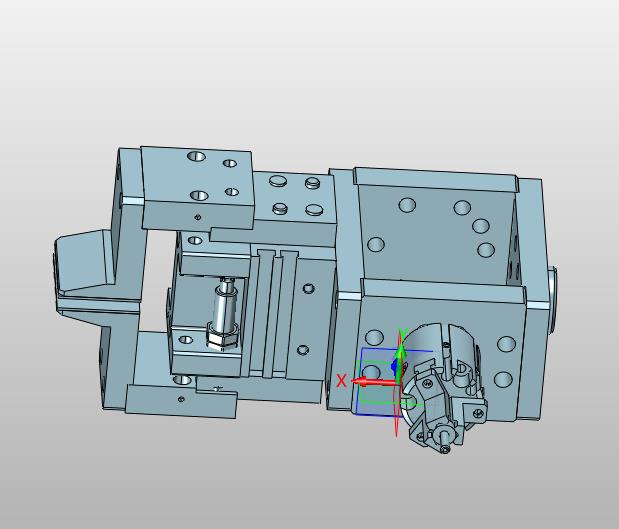
机器人羊角抓手平行和对中
图纸简介
机器人羊角抓手平行和对中:用于机器人搬运,其中一个夹具为对中夹具夹具,搬运轴零件,另一个采用平行夹爪,用于搬运板类零件,可以做到一个机器人对应拿取多种零件。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)

0.png)

0.png)
0_0_364.png)
0.png)

0.png)
0.png)
0.png)