登录注册
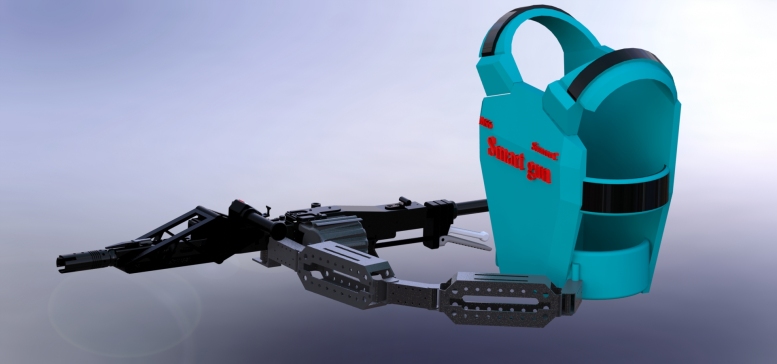
智能机械手(ID:489770)
0.png)
1.png)
2.png)
3.png)
4.png)

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1676379973178.zip | 7.44M |
| 2 | 主视图.png | 200.51K |
| 3 | 右视图.png | 186.50K |
| 4 | 斜侧视图.png | 227.84K |
| 5 | 机械手.JPG | 340.45K |
| 6 | jixieshou.SLDASM | 3.54M |
| 7 | muzhi.SLDASM | 172.35K |
| 8 | shouzhi.SLDASM | 180.66K |
| 9 | 固定端.SLDPRT | 107.38K |
| 10 | 固定端2.SLDPRT | 115.59K |
| 11 | 垫片1.SLDPRT | 75.71K |
| 12 | 垫片3.SLDPRT | 82.23K |
| 13 | 拇指1.SLDPRT | 72.49K |
| 14 | 拇指2.SLDPRT | 84.37K |
| 15 | 拇指3.SLDPRT | 93.78K |
| 16 | 拇指球铰1.SLDPRT | 112.04K |
| 17 | 指头1.SLDPRT | 83.20K |
| 18 | 指头2.SLDPRT | 89.17K |
| 19 | 指头3.SLDPRT | 88.35K |
| 20 | 掌心.SLDPRT | 240.91K |
| 21 | 球.SLDPRT | 146.82K |
| 22 | 球铰连杆.SLDASM | 100.89K |
| 23 | 球铰连杆.SLDPRT | 132.84K |
| 24 | 背盖.SLDPRT | 161.78K |
| 25 | 舵机杆1.SLDPRT | 85.70K |
| 26 | 舵机杆2.SLDPRT | 85.71K |
| 27 | 螺丝 2.SLDPRT | 100.69K |
| 28 | 螺丝1.SLDPRT | 120.29K |
| 29 | 螺丝3.SLDPRT | 109.37K |
| 30 | 螺丝4.SLDPRT | 113.39K |
| 31 | 螺母3.SLDPRT | 142.40K |
| 32 | 螺母4.SLDPRT | 75.68K |
| 33 | 连杆1.SLDPRT | 88.10K |
| 34 | 连杆2.SLDPRT | 80.58K |
| 35 | 连杆3.SLDPRT | 90.71K |
| 36 | 连杆4.SLDPRT | 92.74K |
此图纸下载需要1500金币
立即下载
发布者
INFINITE
创作: 1
粉丝: 0
加入时间:2023-02-13

模型信息
图纸格式:sldasm,sldprt
文件大小:7.61M
所需金币:1500
上传时间:2023-02-14 21:06:15
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
辅助义肢
机械手掌
智能器械
智能传感
图纸简介
一种仿人手掌的义肢机械手,通过机械手腕部的连接法兰,可以实现与医疗领域及助老助残康复等领域的机器人、机械臂末端的连接,从而作为末端执行器。本机械手的各个手指关节通过复合多连杆的结构形式进行连接传动,并由微型电机驱动。该机械手掌作为智能辅助义肢手掌时,通过接收人体手臂的肌电信号结合神经网络算法进行学习训练可以实现人体肌电信号和机械手运动的耦合,以此实现对机械手的主动控制并实现多种不同的抓取动作。此外,通过在手掌外进行蒙皮并增加相应的力觉、触觉传感器,可以实现更好的抓取以及触觉反馈的功能。械手的装配体asm文件中包含了手指关节的运动仿真案例。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)
0.png)