
登录注册
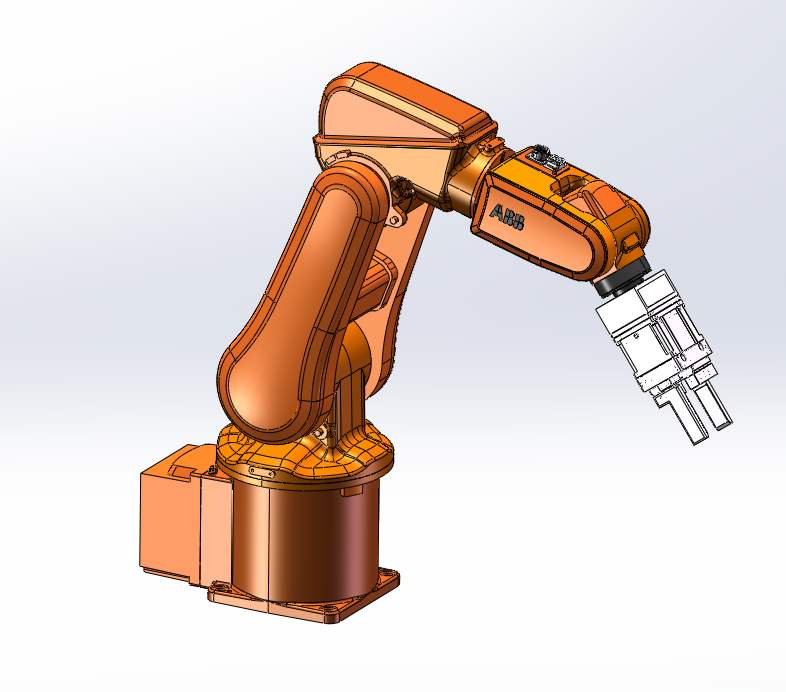
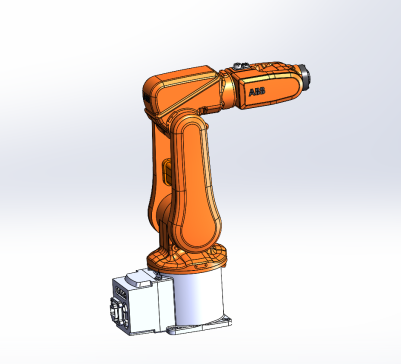
IRB120机器人+夹具(ID:672330)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | IRB120_3-58_IRC5_rev1.SLDASM | 12.95M |
| 2 | 夹具连接板.SLDPRT | 107.17K |
| 3 | 总装配体.SLDASM | 15.30M |
| 4 | 总装配体.SLDDRW | 9.40M |
| 5 | IRB120_3-58_IRC5_Base_rev1.SLDASM | 4.31M |
| 6 | IRB120_3-58_IRC5_Link1_rev1.SLDASM | 1.78M |
| 7 | IRB120_3-58_IRC5_Link2_rev1.SLDASM | 1.26M |
| 8 | IRB120_3-58_IRC5_Link3_rev1.SLDASM | 2.79M |
| 9 | IRB120_3-58_IRC5_Link4_rev1.SLDASM | 2.22M |
| 10 | IRB120_3-58_IRC5_Link5_rev1.SLDASM | 1.52M |
| 11 | IRB120_3-58_IRC5_Link6_rev1.SLDPRT | 211.83K |
| 12 | 装配体.SLDASM | 13.04M |
| 13 | Fingerend.SLDPRT | 311.76K |
| 14 | Flange.SLDPRT | 39.18K |
| 15 | M12ÆÕͨÍøβV2.SLDPRT | 1.56M |
| 16 | PGI-140-80-W-body1.SLDPRT | 660.16K |
| 17 | PGI-140-80-W-S-2022V2-20220811网尾版带指尖.SLDASM | 2.34M |
| 18 | PGI-140-80-W-S-2022V2-20220811网尾版带指尖.STEP | 9.53M |
| 19 | PGI140»¬¿é.SLDPRT | 438.84K |
| 20 | PGI140Ö¸¼â½ºÆ¤-A3.SLDPRT | 71.03K |
| 21 | ÂÝË¿ÏúM4.SLDPRT | 19.12K |
| 22 | 夹具板.SLDPRT | 91.52K |
| 23 | 镜向Fingerend.SLDPRT | 116.48K |
| 24 | 镜向Flange.SLDPRT | 113.54K |
| 25 | 镜向M12ÆÕͨÍøβV2.SLDPRT | 1.98M |
| 26 | 镜向PGI-140-80-W-body1.SLDPRT | 2.00M |
| 27 | 镜向PGI-140-80-W-S-2022V2-20220811网尾版带指尖.SLDASM | 51.45K |
| 28 | 镜向PGI-140-80-W-S-2022V2-20220811网尾版带指尖1.SLDASM | 33.79K |
| 29 | 镜向PGI140»¬¿é.SLDPRT | 524.43K |
| 30 | 镜向PGI140Ö¸¼â½ºÆ¤-A3.SLDPRT | 55.71K |
| 31 | 镜向ÂÝË¿ÏúM4.SLDPRT | 48.25K |
| 32 | 9b090c39b8cccff9a513c90c2d49066.png | 150.78K |
| 33 | b937c3cb742aa8db6002db785b358f5.png | 126.71K |
| 34 | c4eec1ede7fa93cf365367c3bea7dcb.png | 69.14K |
| 35 | d01104ca3862bf75d107c1b8b590882.png | 175.38K |
| 36 | e4b6fab4f222844925df280a8c8c671.png | 223.24K |
此图纸下载需要250金币
立即下载
发布者
仙人掌设计
创作: 334
粉丝: 22
加入时间:2022-11-04

模型信息
图纸ID:672330
图纸格式:sldasm,sldprt,step
文件大小:78.61M
所需金币:250
上传时间:2023-06-25 17:18:55
是否可编辑:可修改,包括参数
软件版本:SOLIDWORKS 2022
标签
图纸简介
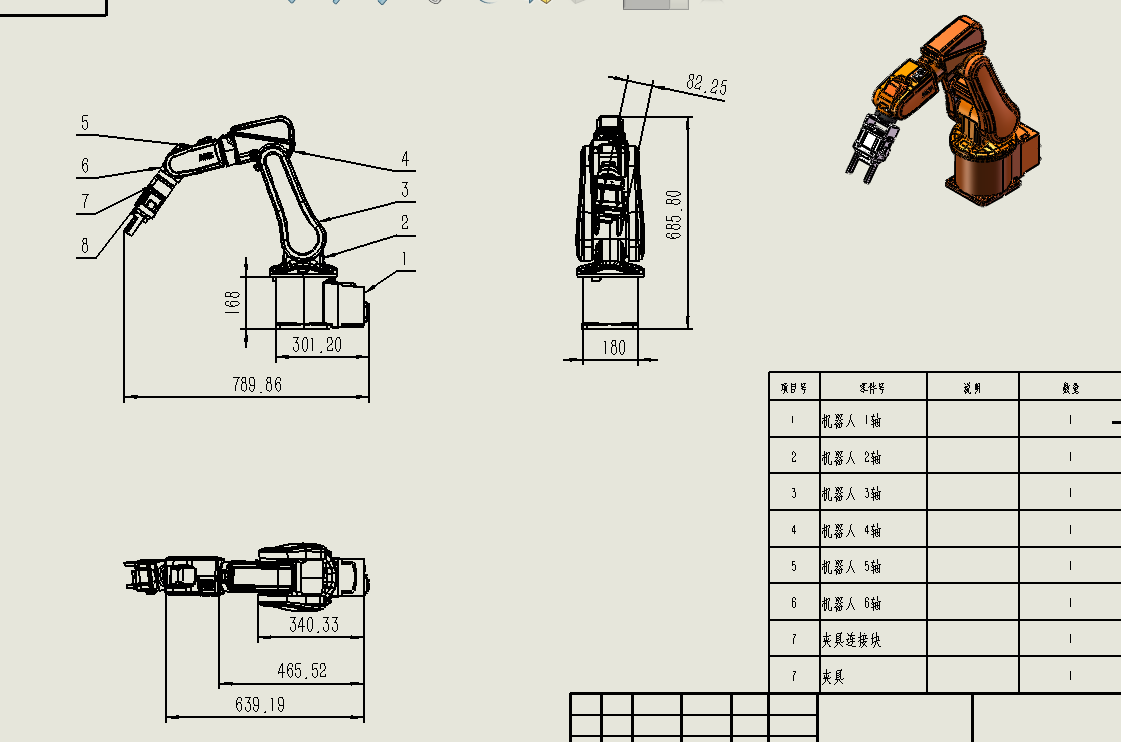
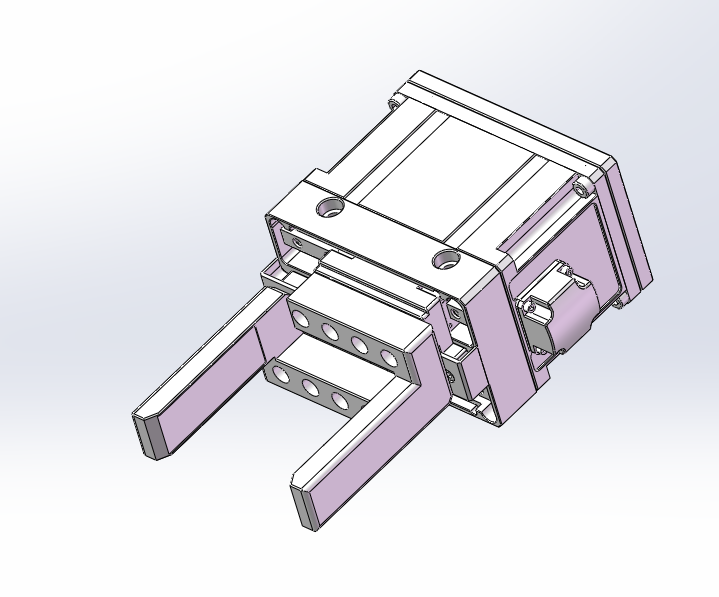
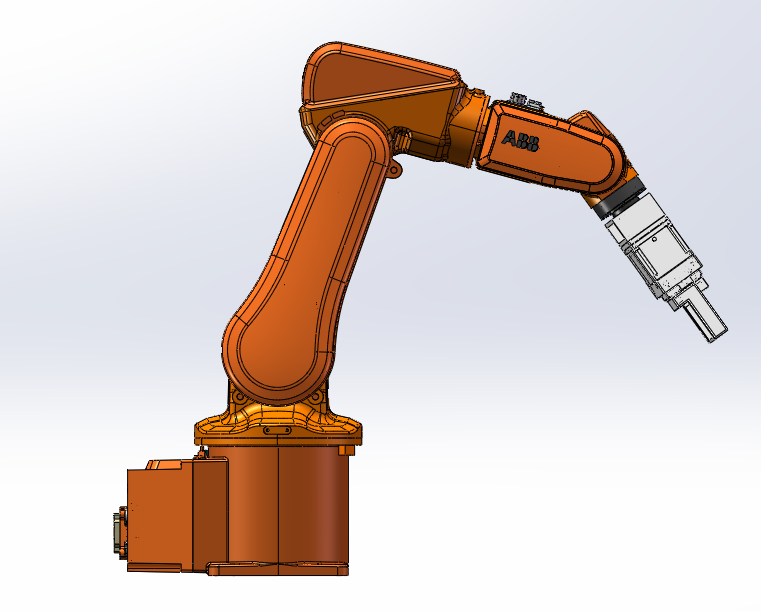
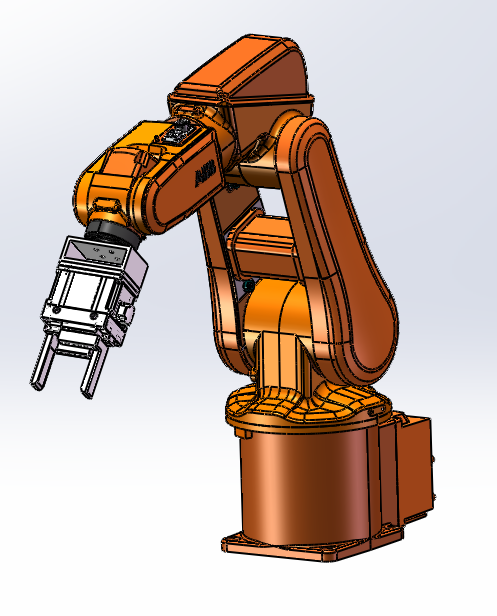
此模型是由SOLIDWORKS2022建模而成。IRB 120是ABB机器人部2009年9月推出的最小机器人和速度最快的六轴机器人,是由ABB(中国)机器人研发团队首次自主研发的一款新型机器人。夹具由定位元件(确定工件在夹具中的正确位置)、夹紧装置 、对刀引导元件(确定刀具与工件的相对位置或导引刀具方向)、分度装置(使工件在一次安装中能完成数个工位的加工,有回转分度装置和直线移动分度装置两类)、连接元件以及夹具体(夹具底座)等组成。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)

0.png)

0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

