
登录注册
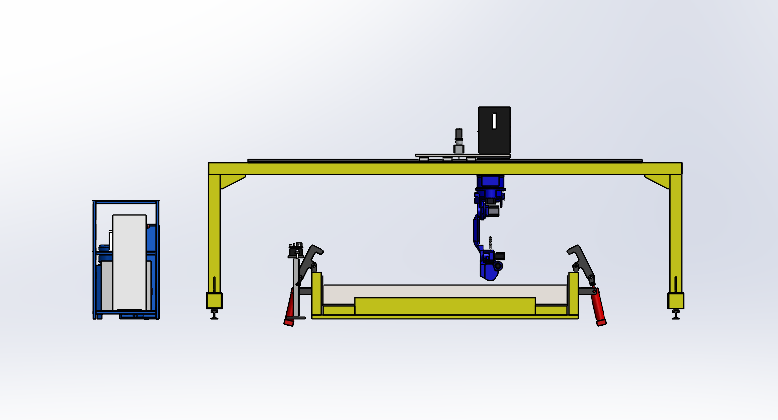
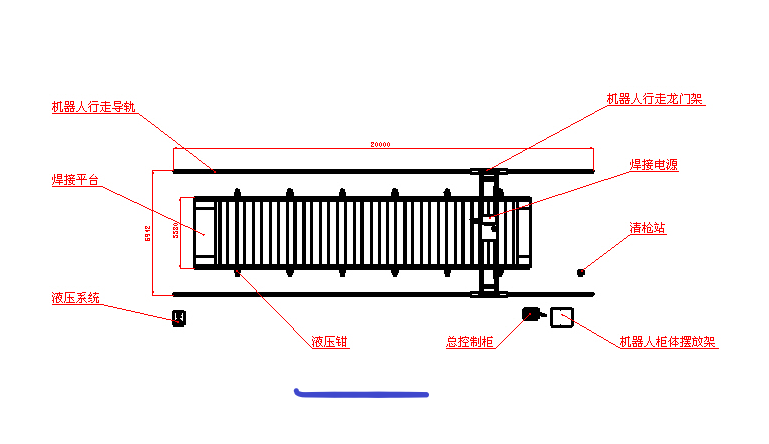
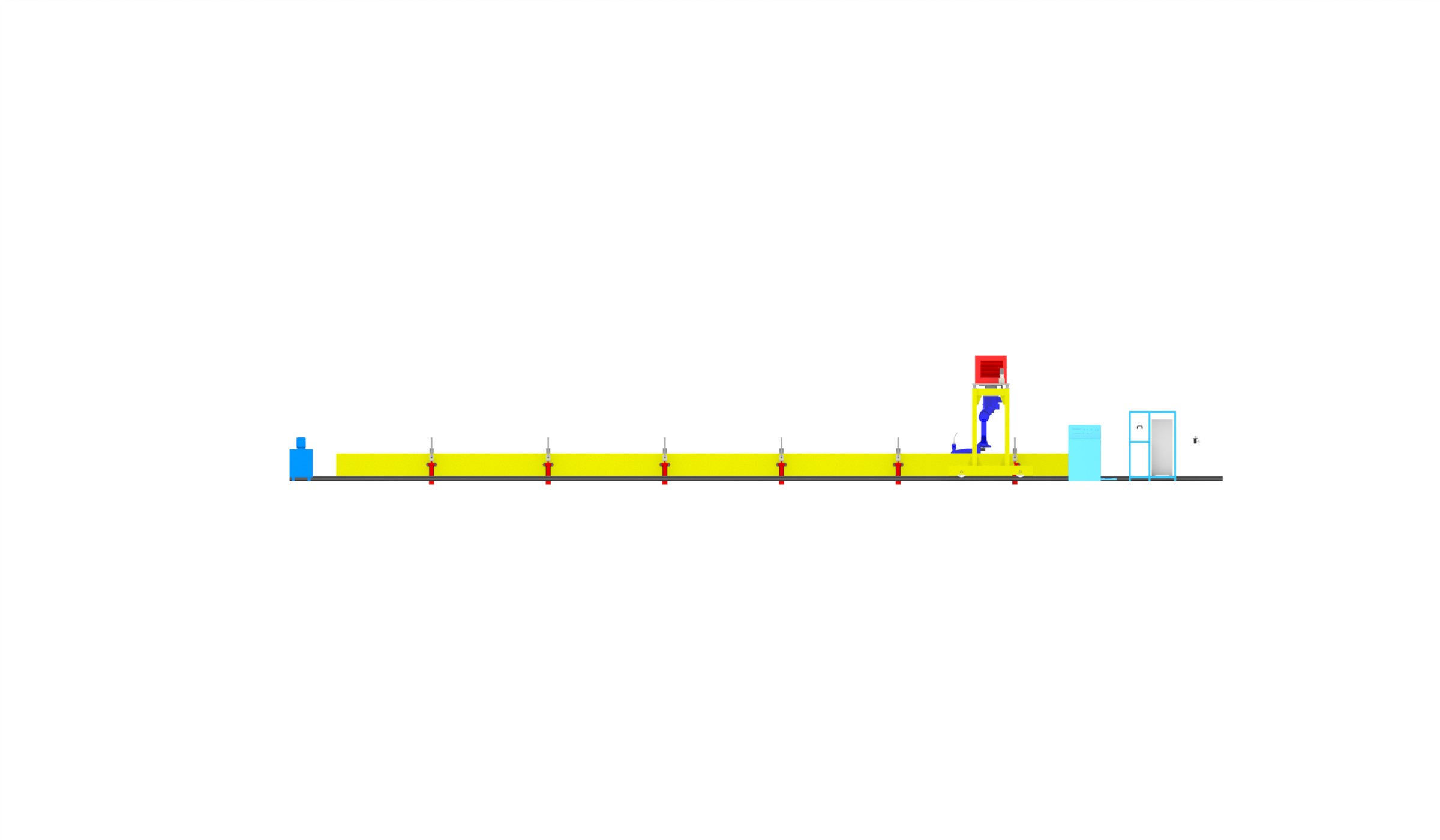
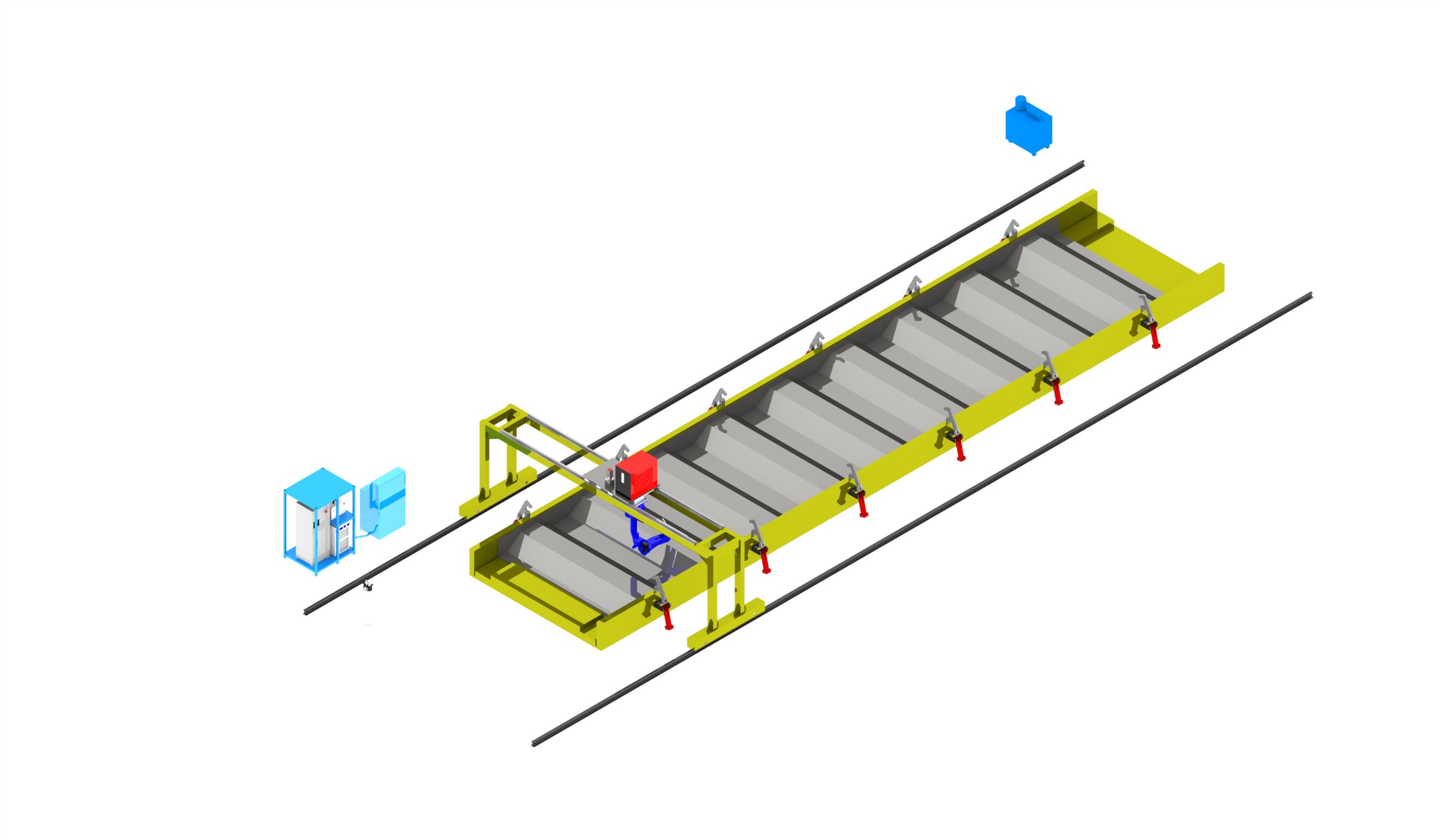
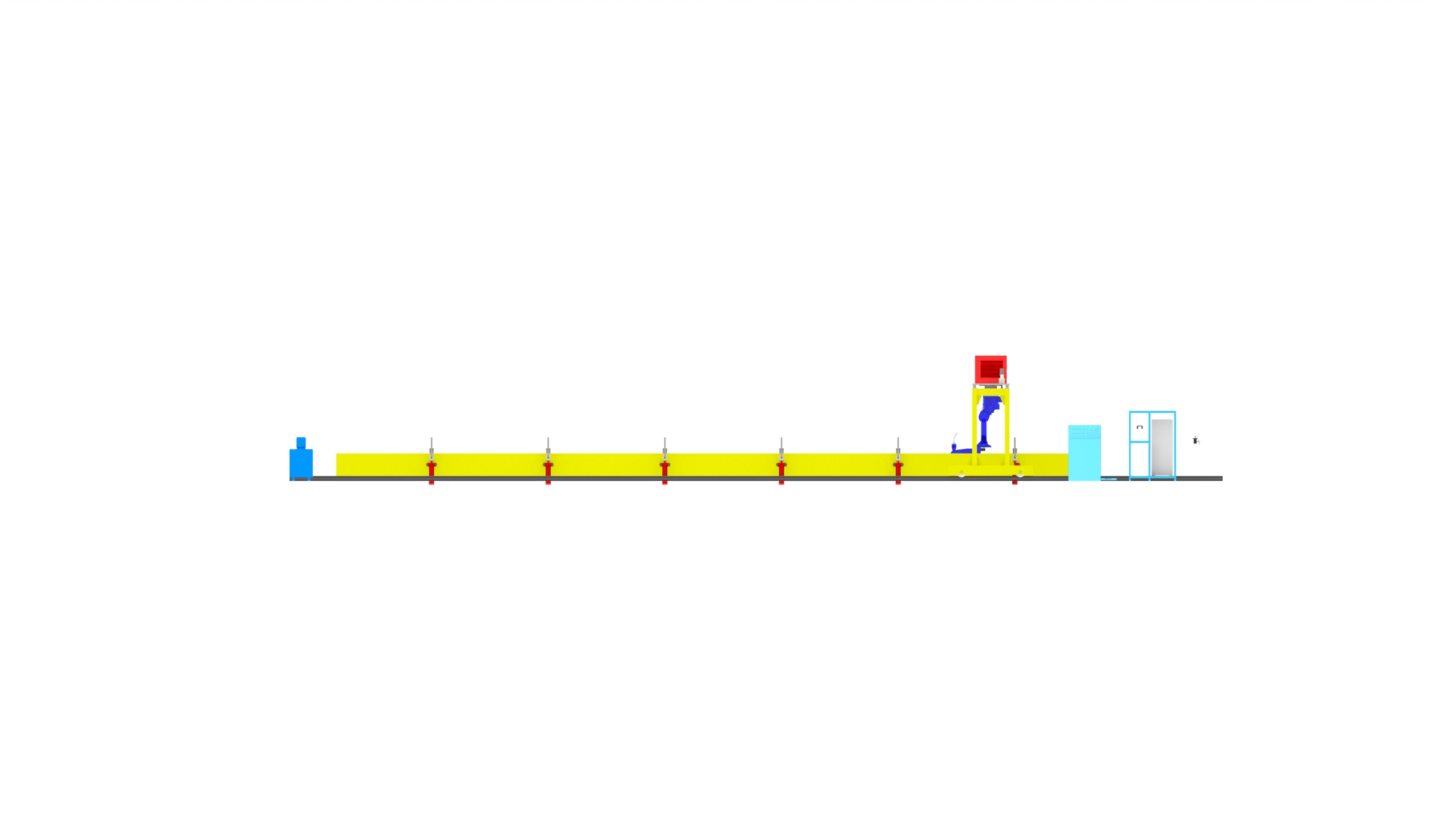
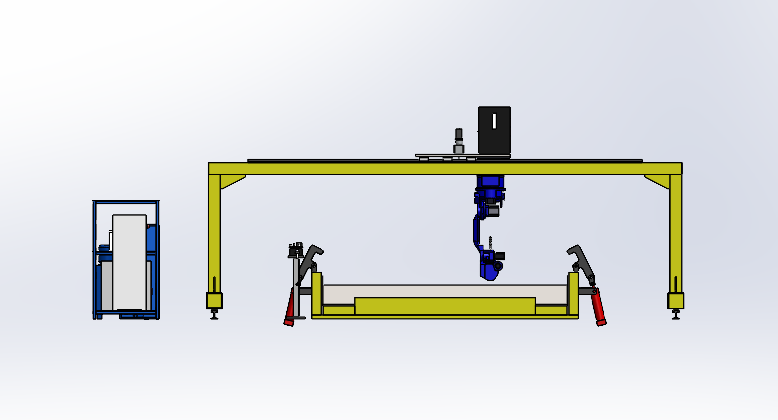
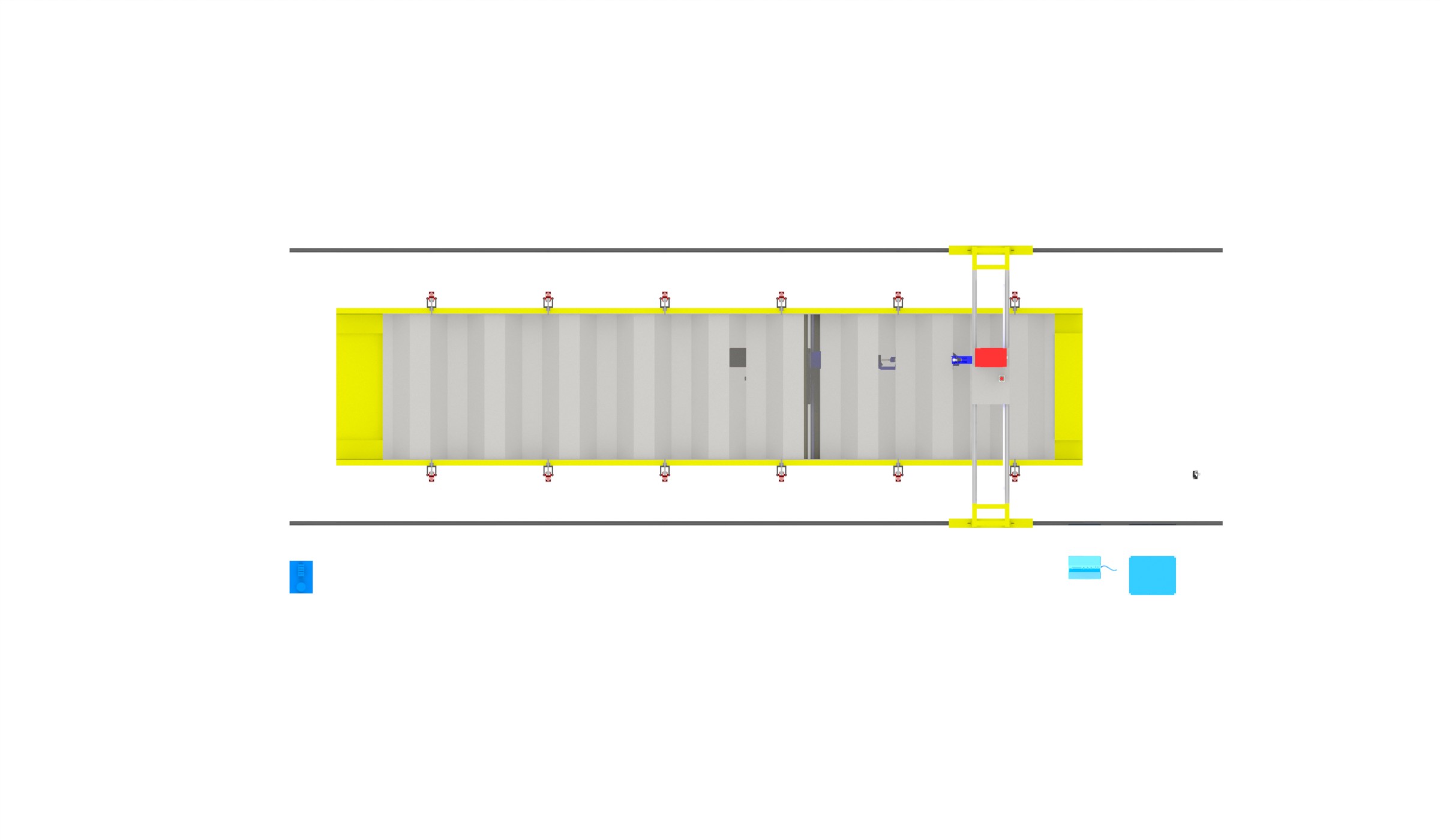
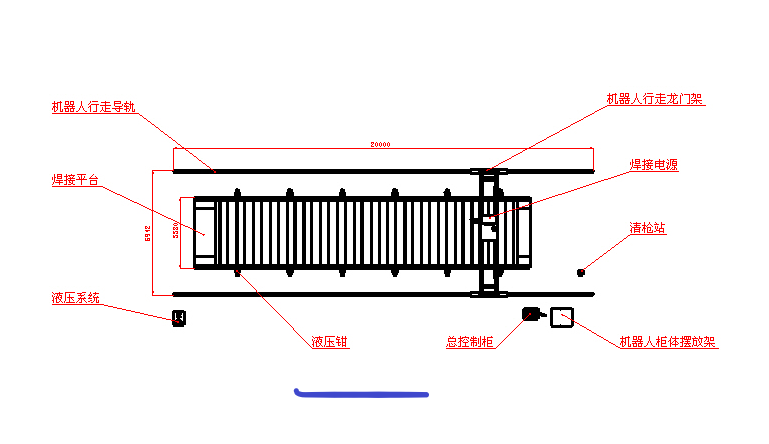
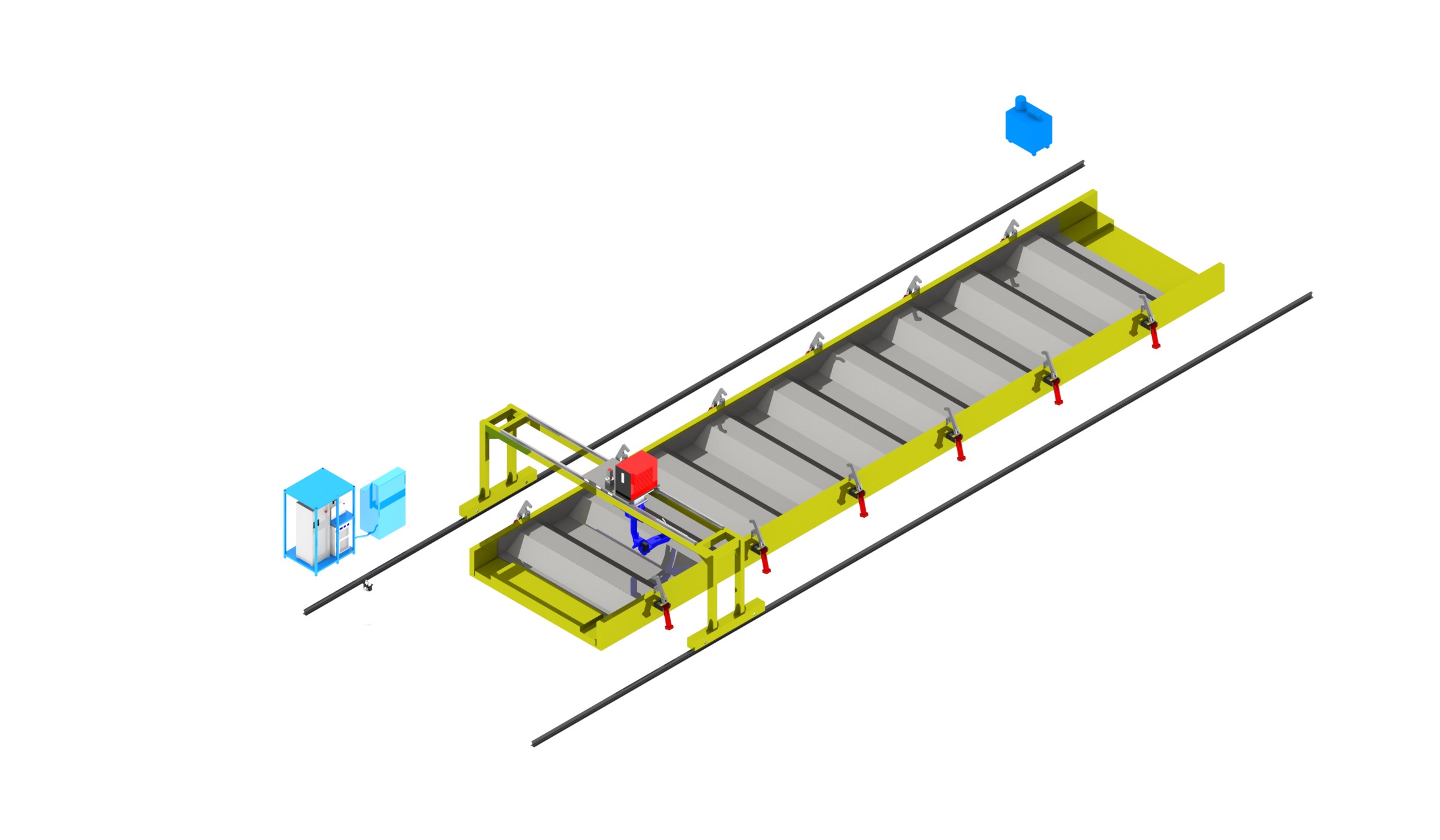
波形板机器人焊接工作站(ID:765331)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 主视图.JPG | 77.30K |
| 2 | 侧视图.png | 59.04K |
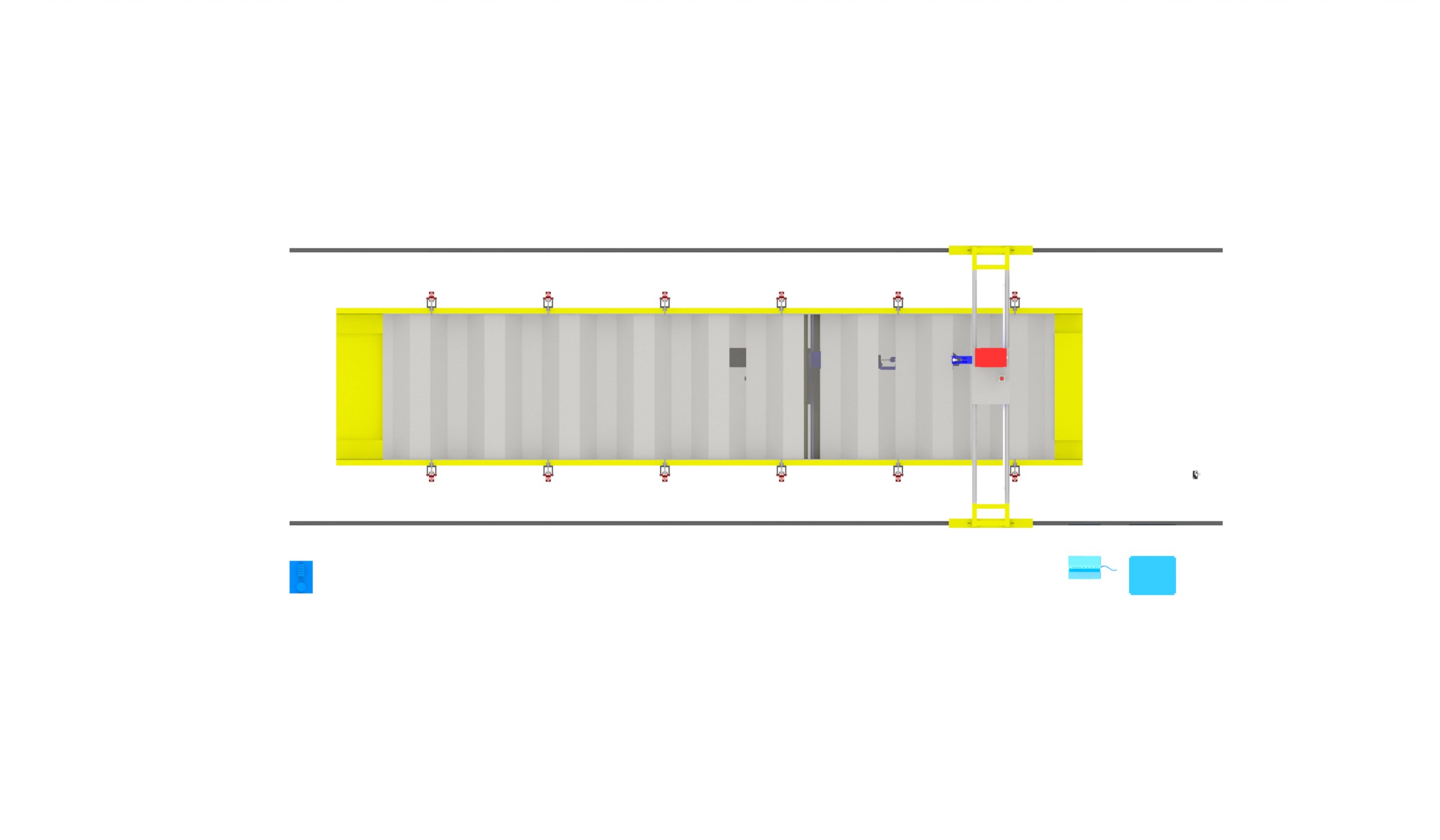
| 3 | 俯视图.JPG | 106.62K |
| 4 | 总图.png | 39.52K |
| 5 | 样件.JPG | 26.66K |
| 6 | 轴向视图.JPG | 173.43K |
| 7 | 1-5.SLDPRT | 249.53K |
| 8 | 1-6.SLDPRT | 181.24K |
| 9 | 24KG轻轨.SLDPRT | 68.40K |
| 10 | base.SLDPRT | 55.44K |
| 11 | krdrobot.SLDASM | 466.69K |
| 12 | link1.SLDPRT | 608.19K |
| 13 | link2.SLDPRT | 473.93K |
| 14 | link3.SLDPRT | 279.63K |
| 15 | link4.SLDPRT | 372.77K |
| 16 | link5.SLDPRT | 285.03K |
| 17 | link6.SLDPRT | 36.25K |
| 18 | RD350焊接电源.SLDPRT | 85.92K |
| 19 | torch.SLDPRT | 70.96K |
| 20 | 压紧板.SLDPRT | 85.90K |
| 21 | 压紧板座.SLDPRT | 71.44K |
| 22 | 变压器.SLDPRT | 79.92K |
| 23 | 工件底座.SLDPRT | 91.07K |
| 24 | 总装图.SLDASM | 1.17M |
| 25 | 机器人底座.SLDPRT | 90.73K |
| 26 | 机器人控制柜.SLDPRT | 88.71K |
| 27 | 机器人柜体组装.SLDASM | 311.82K |
| 28 | 柜体摆放架.SLDPRT | 800.27K |
| 29 | 样件.SLDPRT | 210.86K |
| 30 | 水箱.SLDPRT | 199.75K |
| 31 | 油缸-100-300.SLDPRT | 110.11K |
| 32 | 油缸座.SLDPRT | 69.74K |
| 33 | 油缸连接杆.SLDPRT | 87.78K |
| 34 | 液压站.SLDPRT | 116.75K |
| 35 | 清枪剪丝机.SLDPRT | 132.97K |
| 36 | 清枪站.SLDASM | 75.56K |
| 37 | 滑块.SLDPRT | 63.16K |
| 38 | 移动板.SLDPRT | 58.30K |
| 39 | 行走轮.SLDPRT | 61.96K |
| 40 | 轨.SLDPRT | 259.04K |
| 41 | 龙门架.SLDPRT | 377.27K |
此图纸下载需要66金币
立即下载
发布者
爱吃猫的鱼
创作: 7976
粉丝: 34
加入时间:2023-09-02

模型信息
图纸ID:765331
图纸格式:sldprt,sldasm
文件大小:7.99M
所需金币:66
上传时间:2023-10-30 09:55:02
是否可编辑:可修改,包括参数
软件版本:SOLIDWORKS 2020
标签
机器人
工作站
龙门
自动化
波纹板
图纸简介
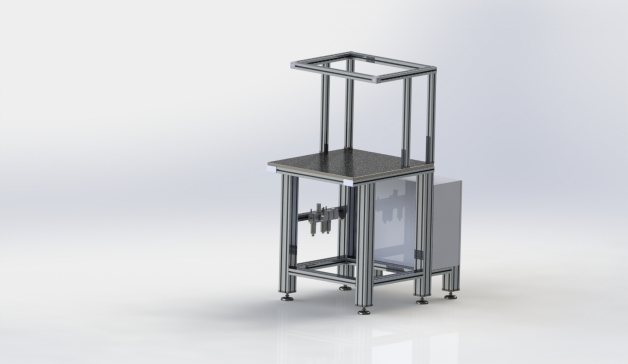
预留设备安装空间:20000mm×7000mm×4000mm(长×宽×高)
本焊接系统采用机械定位、液压装夹的方式对工件进行装夹定位。
机器人行走机构采用电动结构,该机构由伺服电机、精密减速机和精密齿轮等组成,主要采用国外知名品牌,有效保证其回转的稳定性及高精度,并且可以有效的降低工作强度及操作的危险性。
为适应工件的多样性,机器人具有直线行走及横向移动功能,通过更换工装能适应多种工件的焊接。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
2.png)
0.jpg)
0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

