
登录注册
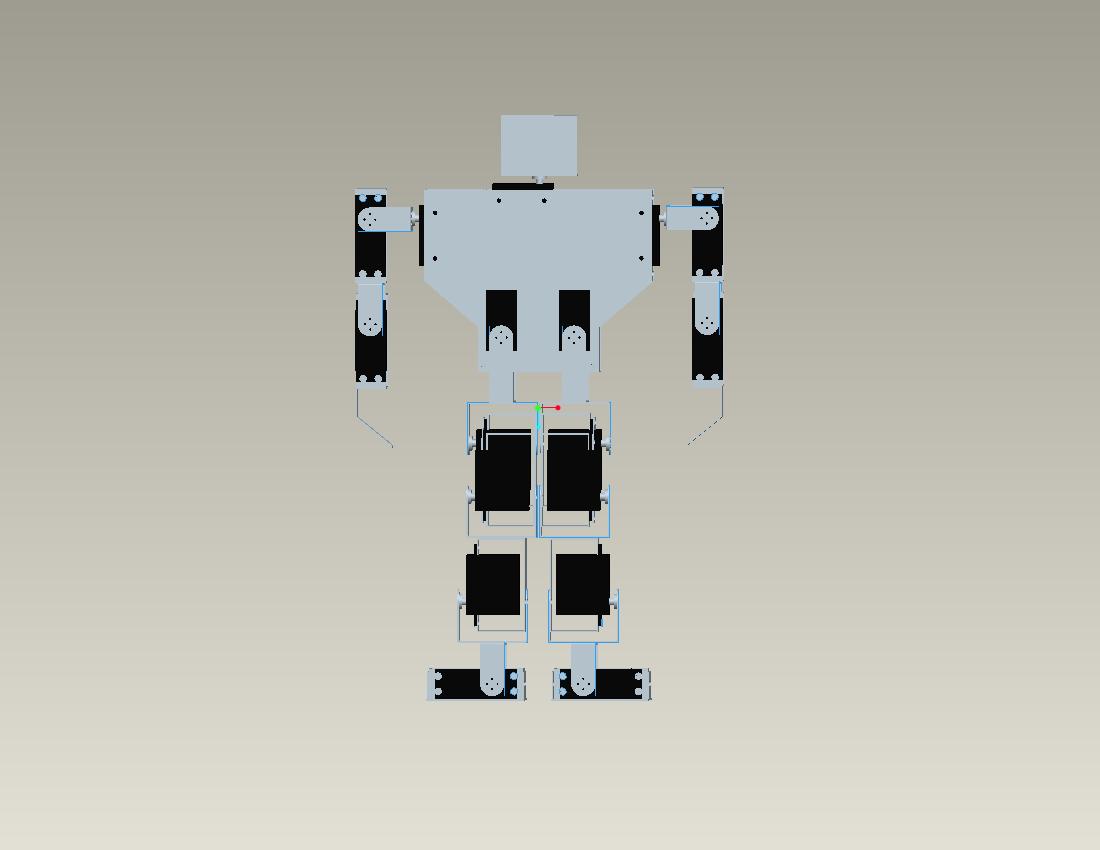
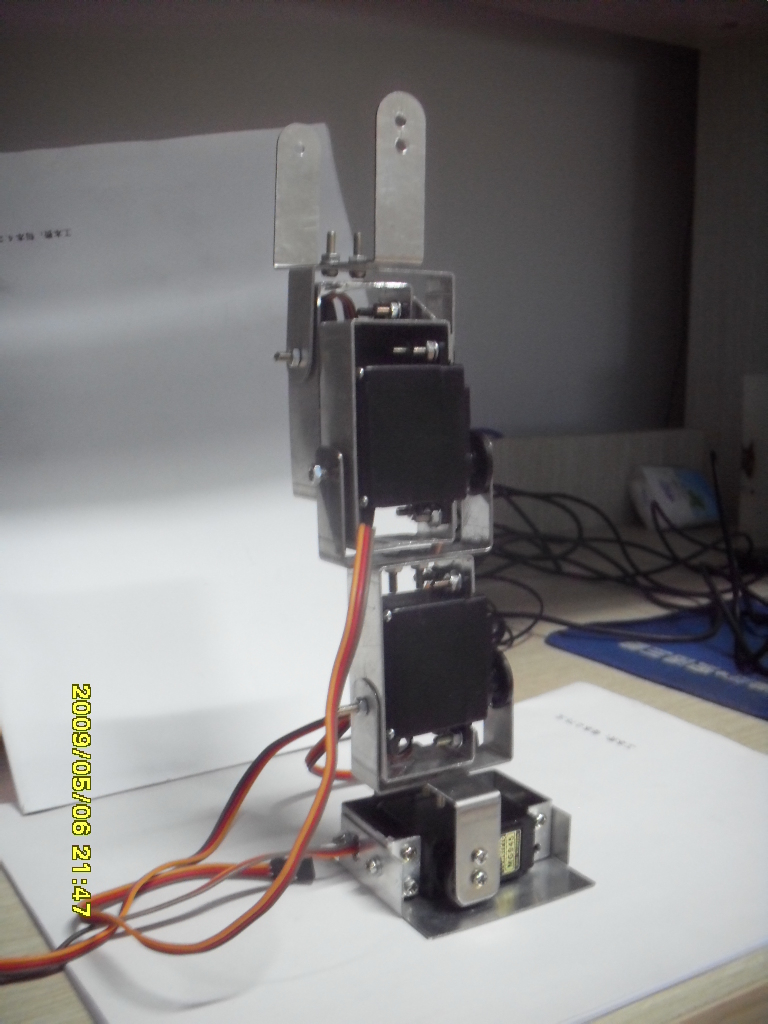
S1060-机械手-两足行走机器人——行走结构部分设计(ID:808692)
查找相似图纸
截图
AI截图渲染
✨AI图片渲染
0.png)

1.png)
2.png)
3.png)
4.png)










































































| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 毕业设计感想启发.doc | 20.50K |
| 2 | 05010245许峰任务书.doc | 56.00K |
| 3 | 05010245许峰外文翻译改好.doc | 506.00K |
| 4 | 05010245许峰开题报告.doc | 67.50K |
| 5 | IntelligentControlofanAutonomousMobileRobotusingType-2FuzzyLogic.pdf | 476.27K |
| 6 | 两足行走机器人——行走结构部分设计.doc | 3.97M |
| 7 | 前期工作材料目录.doc | 33.50K |
| 8 | 南京理工大学泰州科技学院本科优秀毕业设计(论文)推荐表.doc | 46.00K |
| 9 | 封面、中外文摘要.doc | 38.50K |
| 10 | 毕业论文材料清单.doc | 20.00K |
| 11 | 毕业论文答辩.ppt | 3.51M |
| 12 | 毕业设计说明书撰写规范.ppt | 786.00K |
| 13 | 行走结构部分设计审题表.doc | 38.50K |
| 14 | 许峰中期表.doc | 31.50K |
| 15 | 许峰的小论文.doc | 3.37M |
| 16 | asm0001.asm.2 | 50.25K |
| 17 | asm0001.asm.3 | 50.99K |
| 18 | asm0001.asm.4 | 51.89K |
| 19 | asm0003.asm.10 | 53.03K |
| 20 | asm0003.asm.11 | 53.15K |
| 21 | asm0003.asm.12 | 55.18K |
| 22 | asm0003.asm.9 | 50.02K |
| 23 | asm0004.asm.9 | 51.46K |
| 24 | asm0005.asm.10 | 58.85K |
| 25 | asm0005.asm.6 | 57.41K |
| 26 | asm0005.asm.7 | 58.49K |
| 27 | asm0005.asm.8 | 58.61K |
| 28 | asm0005.asm.9 | 58.73K |
| 29 | asm0006.asm.10 | 54.13K |
| 30 | asm0006.asm.11 | 54.24K |
| 31 | asm0006.asm.12 | 56.65K |
| 32 | asm0006.asm.7 | 51.51K |
| 33 | asm0006.asm.8 | 53.56K |
| 34 | asm0006.asm.9 | 53.68K |
| 35 | asm0007.asm.2 | 47.21K |
| 36 | asm0009.asm.2 | 38.57K |
| 37 | asm0010.asm.4 | 50.04K |
| 38 | asm0010.asm.5 | 52.32K |
| 39 | asm0010.asm.6 | 51.44K |
| 40 | asm0011.asm.4 | 50.42K |
| 41 | asm0011.asm.5 | 50.40K |
| 42 | current_session.pro | 277B |
| 43 | drw0001_dwg__out.log.1 | 2.19K |
| 44 | drw0001_dwg__out.log.2 | 1.63K |
| 45 | drw0002_dwg__out.log.1 | 1.63K |
| 46 | drw0002_dwg__out.log.2 | 1.62K |
| 47 | drw0002_dwg__out.log.3 | 2.19K |
| 48 | drw0003_dwg__out.log.1 | 2.20K |
| 49 | drw0003_dwg__out.log.2 | 1.66K |
| 50 | drw0003_dwg__out.log.3 | 1.63K |
| 51 | drw0004_dwg__out.log.1 | 1.63K |
| 52 | drw0005_dwg__out.log.1 | 1.66K |
| 53 | drw0005_dwg__out.log.2 | 1.63K |
| 54 | drw0007_dwg__out.log.1 | 1.66K |
| 55 | drw0008_dwg__out.log.1 | 1.63K |
| 56 | drw0009_dwg__out.log.1 | 1.63K |
| 57 | drw0010_dwg__out.log.1 | 2.19K |
| 58 | drw0011_dwg__out.log.1 | 1.63K |
| 59 | prt0001.prt.13 | 186.50K |
| 60 | prt0002.prt.9 | 97.81K |
| 61 | prt0003.prt.10 | 96.02K |
| 62 | prt0003.prt.11 | 96.38K |
| 63 | prt0003.prt.12 | 129.19K |
| 64 | prt0003.prt.7 | 66.97K |
| 65 | prt0003.prt.8 | 95.23K |
| 66 | prt0003.prt.9 | 95.75K |
| 67 | prt0004.prt.11 | 176.47K |
| 68 | prt0004.prt.12 | 176.78K |
| 69 | prt0004.prt.13 | 189.21K |
| 70 | prt0005.prt.9 | 84.34K |
| 71 | prt0006.prt.12 | 116.02K |
| 72 | prt0006.prt.13 | 132.30K |
| 73 | prt0006.prt.14 | 132.41K |
| 74 | prt0006.prt.15 | 148.52K |
| 75 | prt0006.prt.16 | 178.05K |
| 76 | prt0006.prt.17 | 178.17K |
| 77 | prt0007.prt.12 | 114.85K |
| 78 | prt0008.prt.4 | 63.64K |
| 79 | prt0008.prt.5 | 77.04K |
| 80 | prt0008.prt.6 | 77.16K |
| 81 | prt0009.prt.11 | 106.52K |
| 82 | prt0009.prt.12 | 121.73K |
| 83 | prt0009.prt.13 | 121.85K |
| 84 | prt0010.prt.6 | 147.89K |
| 85 | prt0011.prt.5 | 121.46K |
| 86 | prt0011.prt.6 | 122.49K |
| 87 | prt0011.prt.7 | 131.31K |
| 88 | prt0012.prt.4 | 79.14K |
| 89 | prt0014.prt.2 | 84.16K |
| 90 | prt0014.prt.3 | 79.67K |
| 91 | C开源的YETI两足电脑编程机器人视频展示【大谷机器人】.flv | 2.11M |
| 92 | 世界最小的两足步行机器人iSOBOT01.flv | 665.04K |
| 93 | 世界最小的两足步行机器人iSOBOT02.flv | 608.39K |
| 94 | IMG0099A.jpg | 22.09K |
| 95 | IMG0100A.jpg | 25.02K |
| 96 | IMG0101A.jpg | 23.29K |
| 97 | IMG0102A.jpg | 24.64K |
| 98 | IMG0103A.jpg | 20.63K |
| 99 | IMG0104A.jpg | 18.84K |
| 100 | IMG0105A.jpg | 22.13K |
| 101 | IMG0106A.jpg | 18.77K |
| 102 | IMG0107A.jpg | 18.36K |
| 103 | IMG0108A.jpg | 21.56K |
| 104 | IMG0109A.jpg | 20.11K |
| 105 | IMG0110A.jpg | 18.77K |
| 106 | IMG0111A.jpg | 17.89K |
| 107 | IMG0112A.jpg | 19.62K |
| 108 | IMG0113A.jpg | 20.28K |
| 109 | IMG0114A.jpg | 21.96K |
| 110 | X-W-R-B.bmp | 688.92K |
| 111 | X-W-R-L.bmp.bmp | 320.85K |
| 112 | X-W-R.bmp | 677.07K |
| 113 | 大腿0.bmp | 309.99K |
| 114 | 头部零件.bmp | 863.54K |
| 115 | 头部零件2.bmp | 885.17K |
| 116 | 手0.bmp | 329.03K |
| 117 | 手1.bmp | 332.87K |
| 118 | 手2.bmp | 277.12K |
| 119 | 手3.bmp | 314.12K |
| 120 | 手4.bmp | 324.54K |
| 121 | 手5.bmp | 411.26K |
| 122 | 胸0.bmp | 484.55K |
| 123 | 胸1.bmp | 312.36K |
| 124 | 脚0.bmp | 427.55K |
| 125 | 脚1.bmp | 505.38K |
| 126 | 脚2.bmp | 468.84K |
| 127 | 脚3.bmp | 480.33K |
| 128 | 腿1.bmp | 332.05K |
| 129 | 腿根.bmp | 473.76K |
| 130 | 舵机.bmp | 393.22K |
| 131 | 舵机1.bmp | 399.91K |
| 132 | 舵机2.jpg | 14.61K |
| 133 | 0012011210200190b4997cd0.jpg | 7.83K |
| 134 | 1.bmp | 119.24K |
| 135 | 12.bmp | 1.09M |
| 136 | 24.bmp | 1.94M |
| 137 | 25.bmp | 1.77M |
| 138 | 8.bmp | 1.58M |
| 139 | asm0001.jpg | 34.44K |
| 140 | SDC11274.JPG | 500.01K |
| 141 | SDC11275.JPG | 413.80K |
| 142 | SDC11276.JPG | 389.13K |
| 143 | SDC11277.JPG | 390.95K |
| 144 | SDC11278.JPG | 462.32K |
| 145 | SDC11279.JPG | 462.06K |
| 146 | SDC11280.JPG | 488.84K |
| 147 | SDC11281.JPG | 467.18K |
| 148 | SDC11282.JPG | 463.54K |
| 149 | SDC11283.JPG | 479.12K |
| 150 | SDC11284.JPG | 381.17K |
| 151 | SDC11285.JPG | 457.52K |
| 152 | SDC11286.JPG | 465.42K |
| 153 | SDC11287.JPG | 473.23K |
| 154 | SDC11288.JPG | 439.65K |
| 155 | SDC11289.JPG | 471.09K |
| 156 | SDC11290.JPG | 438.32K |
| 157 | SDC11291.JPG | 466.11K |
| 158 | SDC11292.JPG | 423.22K |
| 159 | SDC11293.JPG | 442.60K |
| 160 | SDC11294.JPG | 483.00K |
| 161 | SDC11295.JPG | 484.01K |
| 162 | SDC11296.JPG | 432.05K |
| 163 | SDC11297.JPG | 441.41K |
| 164 | SDC11298.JPG | 451.58K |
| 165 | SDC11299.JPG | 460.75K |
| 166 | SDC11300.JPG | 474.86K |
| 167 | SDC11301.JPG | 476.73K |
| 168 | SDC11302.JPG | 442.81K |
| 169 | SDC11303.JPG | 491.60K |
| 170 | SDC11304.JPG | 493.58K |
| 171 | SDC11305.JPG | 482.16K |
| 172 | SDC11306.JPG | 486.02K |
| 173 | SDC11307.JPG | 475.14K |
| 174 | SDC11308.JPG | 483.08K |
| 175 | SDC11309.JPG | 477.22K |
| 176 | SDC11310.JPG | 469.64K |
| 177 | SDC11311.JPG | 480.15K |
| 178 | SDC11312.JPG | 470.31K |
| 179 | SDC11313.JPG | 455.63K |
| 180 | SDC11314.JPG | 468.49K |
| 181 | SDC11315.JPG | 465.62K |
| 182 | SDC11316.JPG | 474.17K |
| 183 | SDC11317.JPG | 398.42K |
| 184 | SDC11318.JPG | 417.87K |
| 185 | SDC11319.JPG | 416.20K |
| 186 | SDC11320.JPG | 408.83K |
| 187 | SDC11321.JPG | 453.49K |
| 188 | SDC11322.JPG | 399.33K |
| 189 | SDC11323.JPG | 399.20K |
| 190 | SDC11324.JPG | 396.43K |
| 191 | SDC11325.JPG | 398.98K |
| 192 | SDC11326.JPG | 387.92K |
| 193 | SDC11327.JPG | 387.47K |
| 194 | SDC11328.JPG | 392.55K |
| 195 | SDC11329.JPG | 398.45K |
| 196 | SDC11330.JPG | 379.66K |
| 197 | SDC11331.JPG | 377.08K |
| 198 | SDC11332.JPG | 481.18K |
| 199 | SDC11333.JPG | 398.95K |
| 200 | SDC11334.JPG | 484.78K |
| 201 | SDC11335.JPG | 448.31K |
| 202 | SDC11336.JPG | 401.32K |
| 203 | SDC11337.JPG | 385.67K |
| 204 | SDC11338.JPG | 375.05K |
| 205 | SDC11339.JPG | 397.21K |
| 206 | SDC11340.JPG | 470.28K |
| 207 | SDC11341.JPG | 479.82K |
| 208 | SDC11342.JPG | 379.75K |
| 209 | SDC11343.JPG | 458.51K |
| 210 | SDC11344.JPG | 424.60K |
| 211 | SDC11345.JPG | 387.91K |
| 212 | SDC11346.JPG | 407.13K |
| 213 | SDC11347.JPG | 387.60K |
| 214 | SDC11348.JPG | 380.51K |
| 215 | SDC11349.JPG | 460.21K |
| 216 | SDC11350.JPG | 459.88K |
| 217 | SDC11351.JPG | 491.57K |
| 218 | SDC11352.JPG | 459.94K |
| 219 | SDC11353.JPG | 483.24K |
| 220 | SDC11354.JPG | 466.17K |
| 221 | SDC11355.JPG | 474.00K |
| 222 | SDC11356.JPG | 478.07K |
| 223 | SDC11358.JPG | 403.52K |
| 224 | SDC11359.JPG | 404.23K |
| 225 | SDC11360.JPG | 413.77K |
| 226 | SDC11361.JPG | 405.50K |
| 227 | SDC11362.JPG | 407.26K |
| 228 | SDC11363.JPG | 410.61K |
| 229 | SDC11364.JPG | 406.47K |
| 230 | SDC11365.JPG | 408.47K |
| 231 | SDC11366.JPG | 411.98K |
| 232 | SDC11367.JPG | 404.78K |
| 233 | SDC11368.JPG | 400.62K |
| 234 | SDC11369.JPG | 405.91K |
| 235 | SDC11370.JPG | 405.26K |
| 236 | SDC11371.JPG | 404.72K |
| 237 | SDC11372.JPG | 427.53K |
| 238 | SDC11373.JPG | 405.57K |
| 239 | X-W-R.bmp | 677.07K |
| 240 | 线切割.ppt | 2.37M |
| 241 | 线切割相关知识.doc | 803.08K |
| 242 | 双足行走机器人头部和身体.dwg | 69.20K |
| 243 | 各关节舵机连接件.dwg | 44.41K |
| 244 | 大腿舵机连接件.dwg | 54.79K |
| 245 | 头.dwg | 46.89K |
| 246 | 手.dwg | 36.36K |
| 247 | 手臂舵机连接件.dwg | 53.20K |
| 248 | 机器人总装图终极版.dwg | 107.08K |
| 249 | 标题栏.dwg | 40.77K |
| 250 | 脚底2.dwg | 52.86K |
| 251 | 腿部装备图.dwg | 64.82K |
| 252 | 臂部装配图.dwg | 56.16K |
| 253 | 舵机和舵机之间连接件.dwg | 52.79K |
| 254 | 舵盘连接件.dwg | 45.72K |
| 255 | 身体后面.dwg | 55.05K |
| 256 | 身体和腿部连接件.dwg | 52.32K |
| 257 | 身体正面.dwg | 41.56K |
| 258 | 身体连接件.dwg | 52.46K |
此图纸下载需要10金币
立即下载
发布者
愉快的外套
创作: 13742
粉丝: 148
加入时间:2023-10-25

模型信息
图纸ID:808692
图纸格式:pdf,asm,prt,dwg
文件大小:65.64M
所需金币:10
上传时间:2023-11-22 14:59:55
是否可编辑:可修改,包括参数
软件版本:PROE
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.jpg)
0_0_364.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

