登录注册
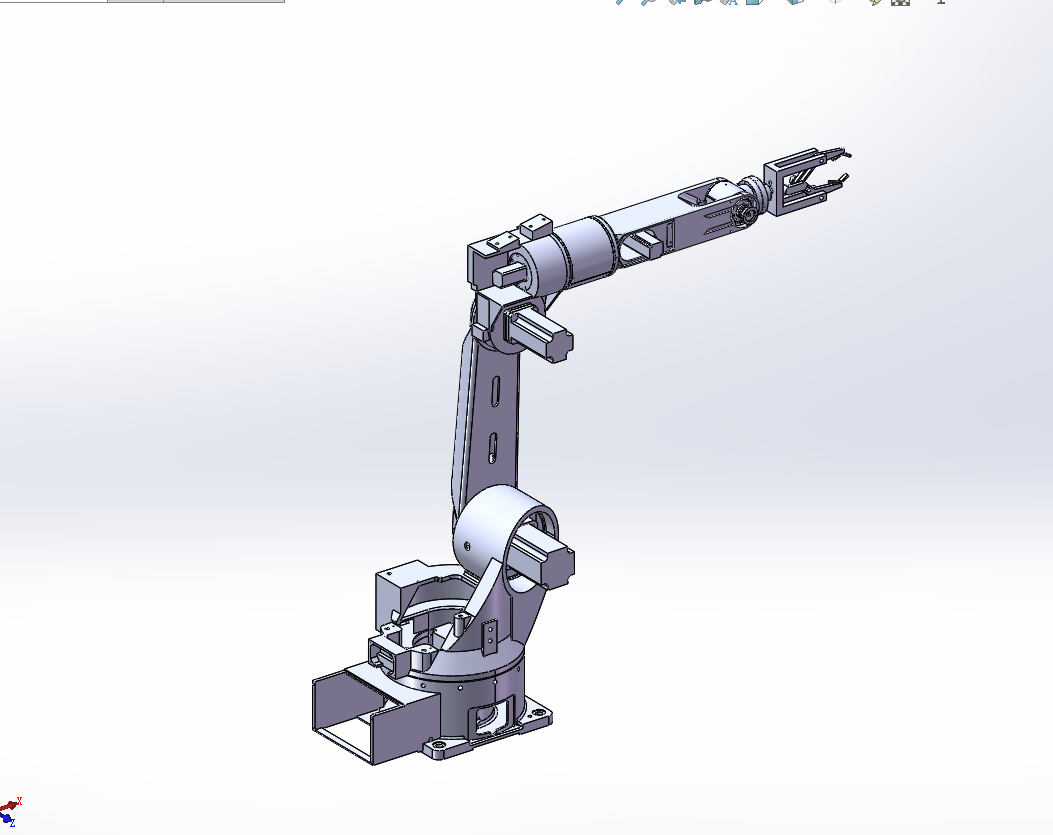
五自由度机器人机构设计-串联机器人机械手设计含三维图+CAD图纸+说明书(ID:841679)
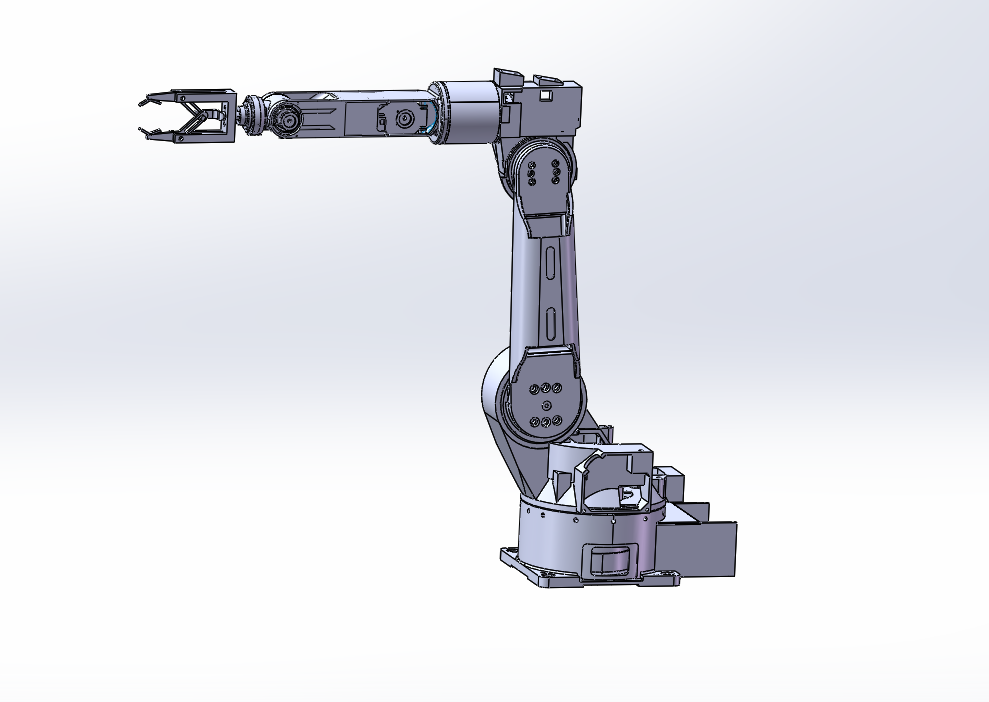
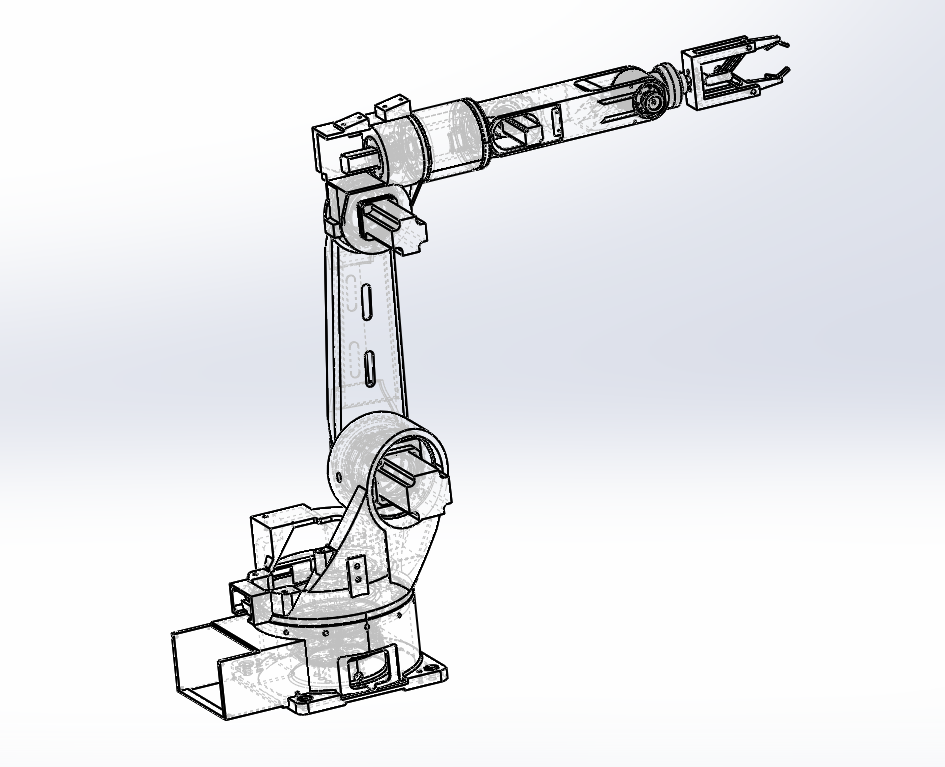
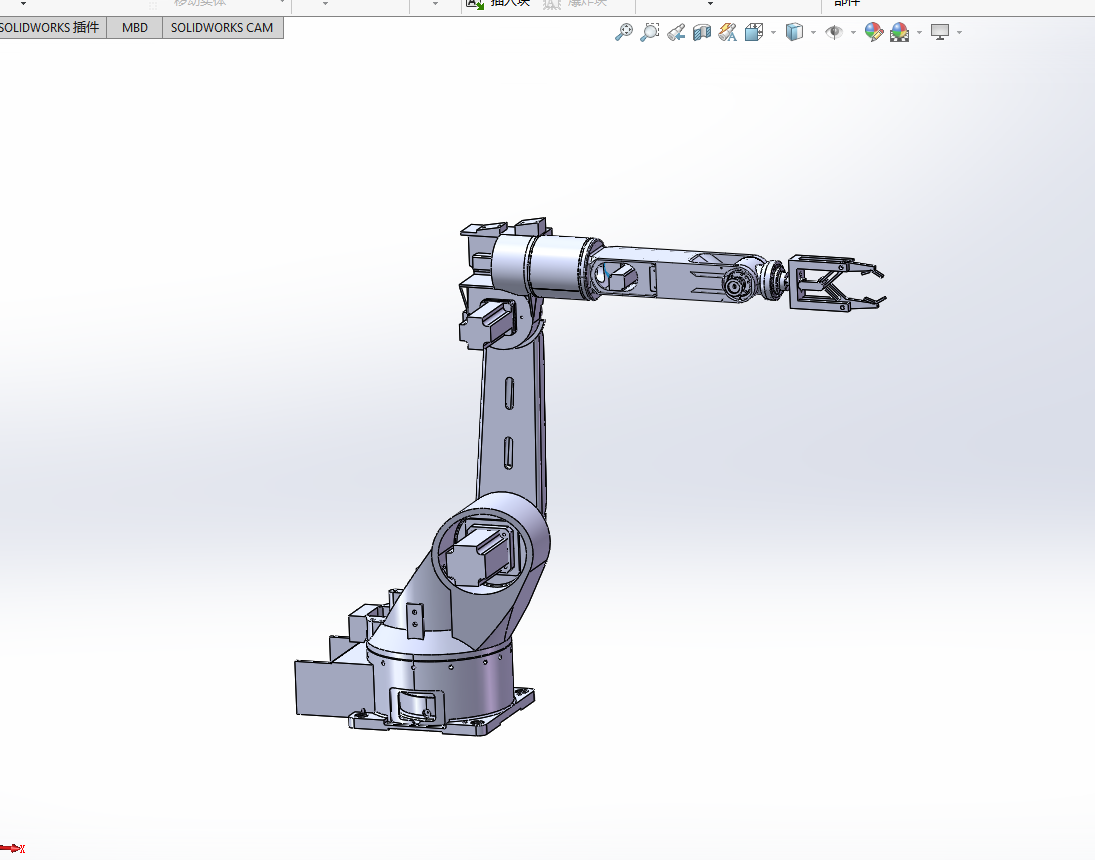
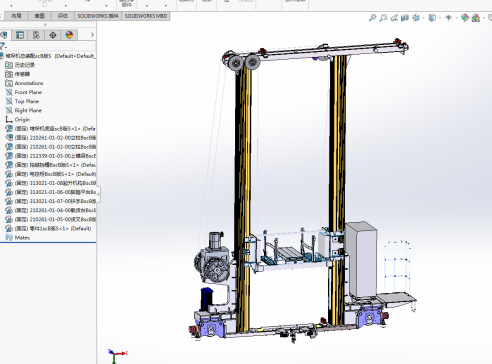
0.png)
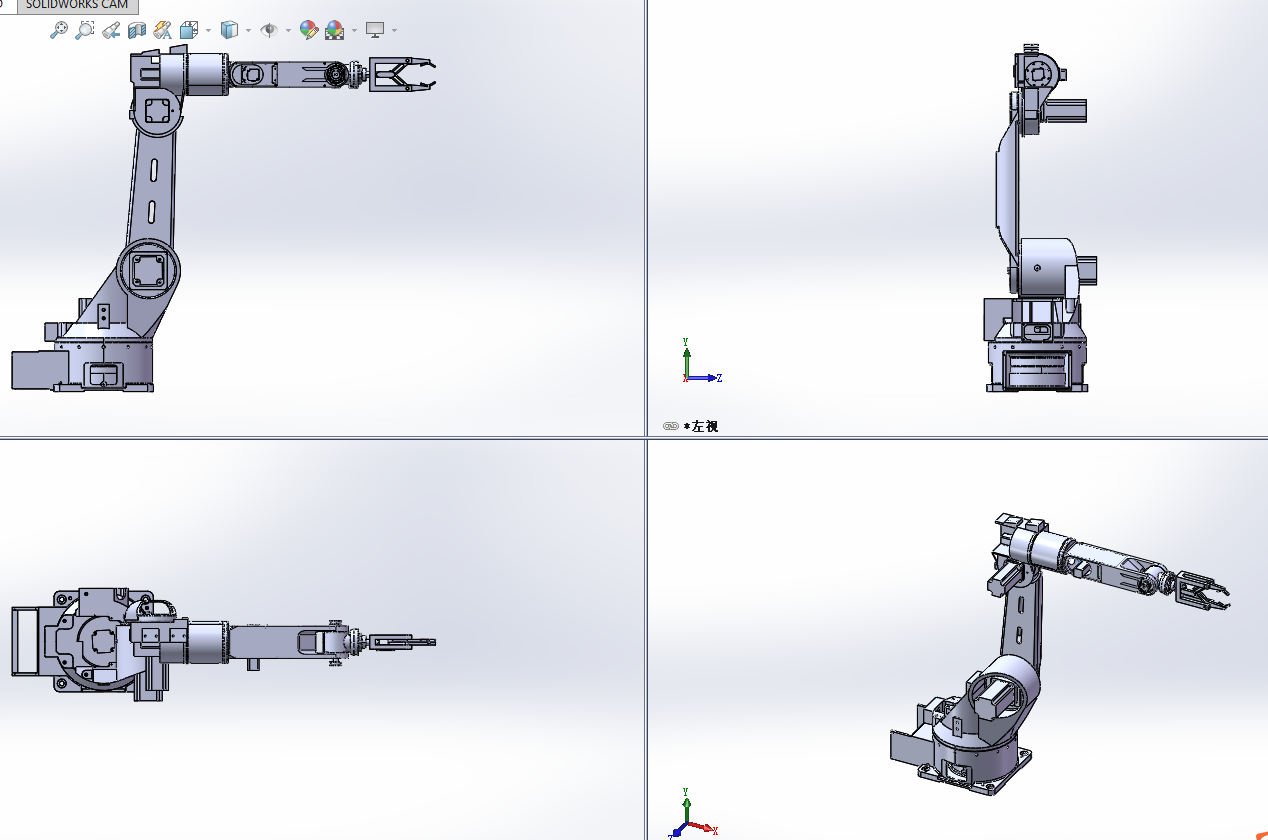
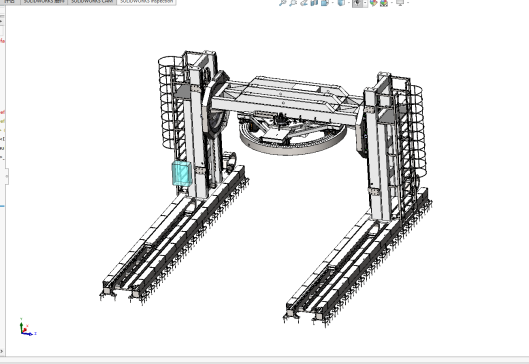
2.png)
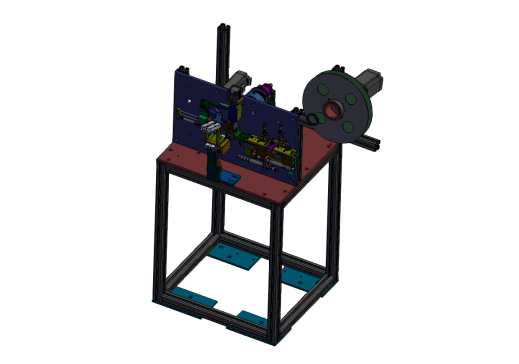
1.png)
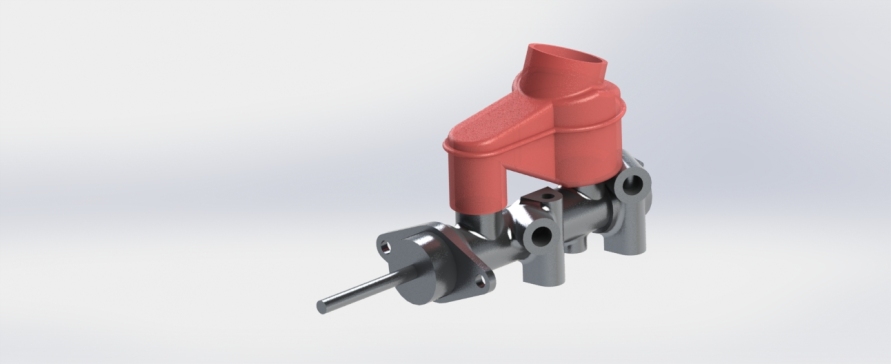
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17026628786790.zip | 24.23M |
| 2 | 中期检查.docx | 15.00K |
| 3 | 任务书.docx | 297.70K |
| 4 | 外文翻译.doc | 174.50K |
| 5 | 开题报告-终.docx | 21.37K |
| 6 | 答辩记录.docx | 15.86K |
| 7 | 评定书.docx | 12.87K |
| 8 | 评阅书.docx | 12.67K |
| 9 | 0三维预览1.png | 191.10K |
| 10 | 0三维预览2.png | 158.80K |
| 11 | 0三维预览3.png | 316.08K |
| 12 | 0三维预览4.png | 227.64K |
| 13 | 0三维预览5.png | 191.11K |
| 14 | zpt.SLDASM | 7.59M |
| 15 | zpt.stp | 9.11M |
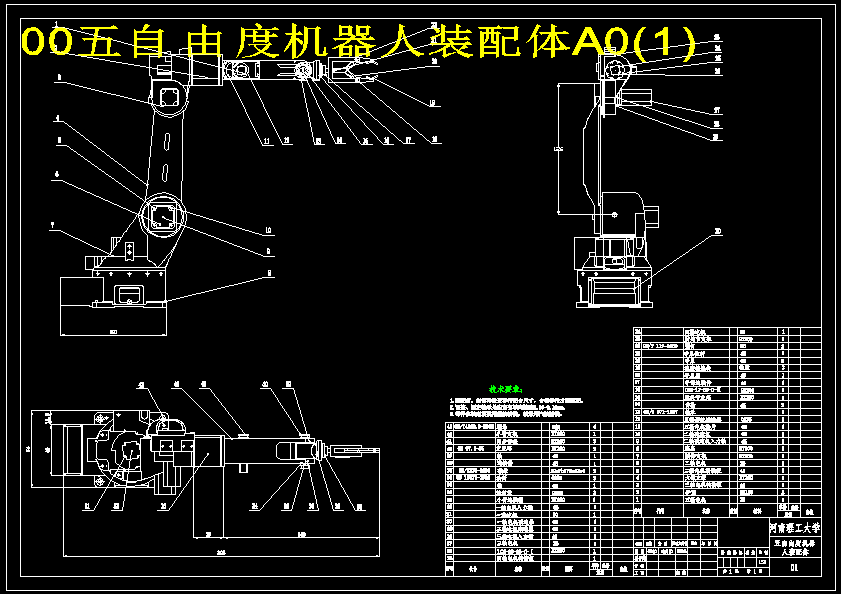
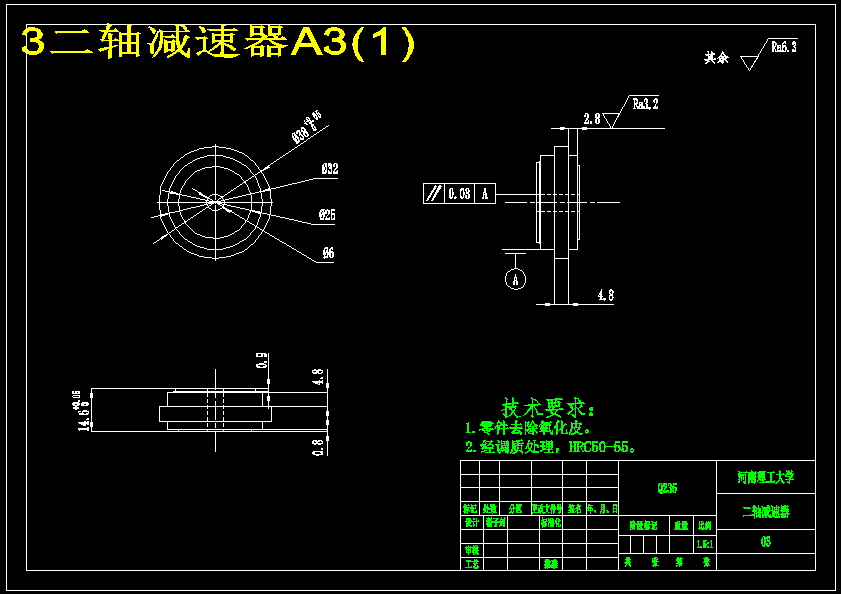
| 16 | 00五自由度机器人装配体A01.dwg | 145.44K |
| 17 | 00五自由度机器人装配体A01.png | 23.52K |
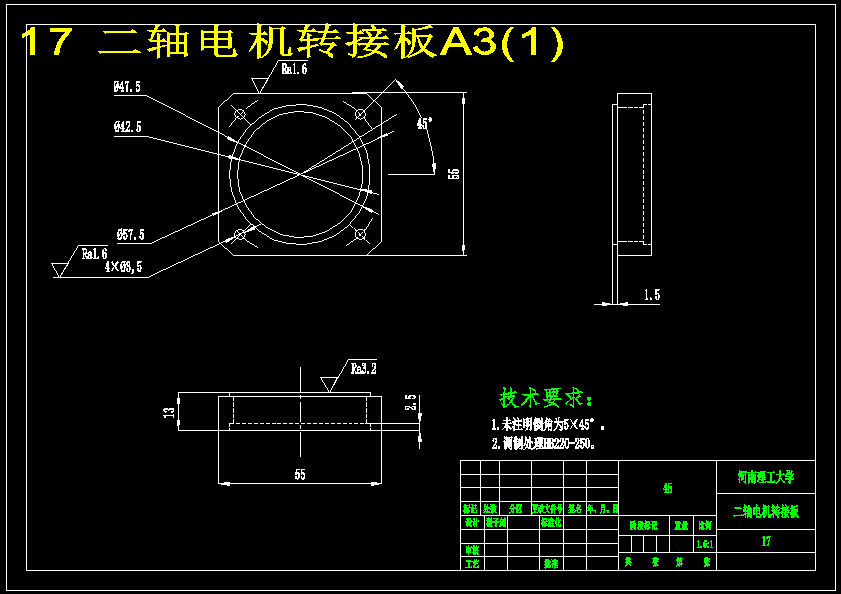
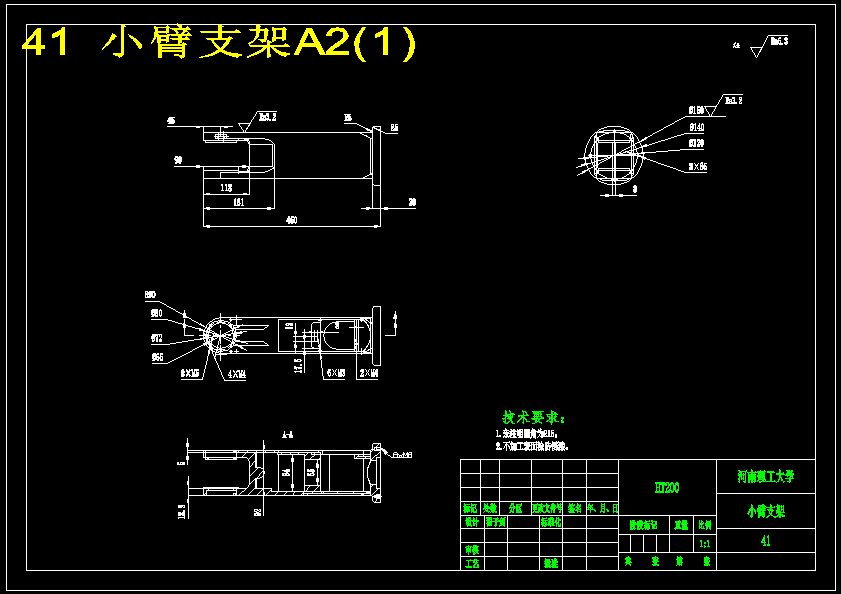
| 18 | 17二轴电机转接板A31.dwg | 55.50K |
| 19 | 17二轴电机转接板A31.png | 13.76K |
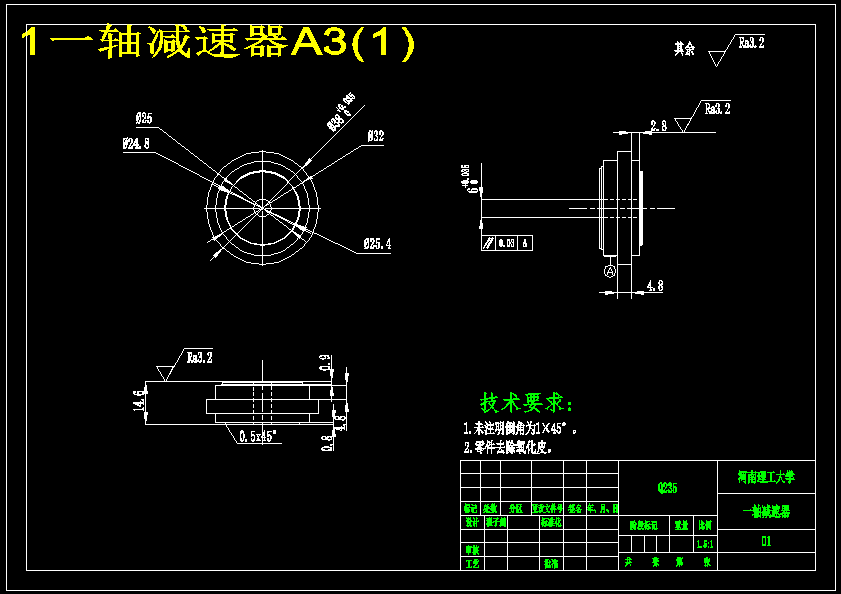
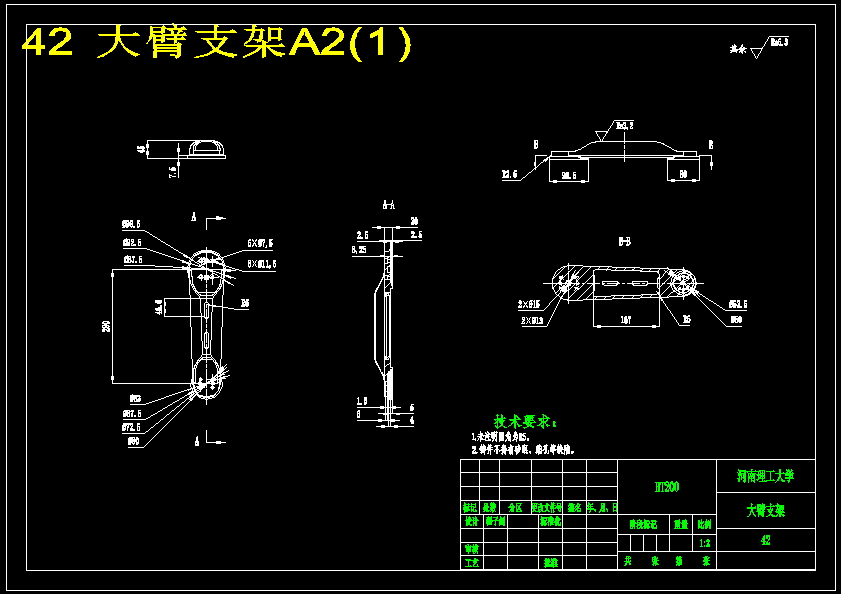
| 20 | 1一轴减速器A31.dwg | 58.59K |
| 21 | 1一轴减速器A31.png | 13.67K |
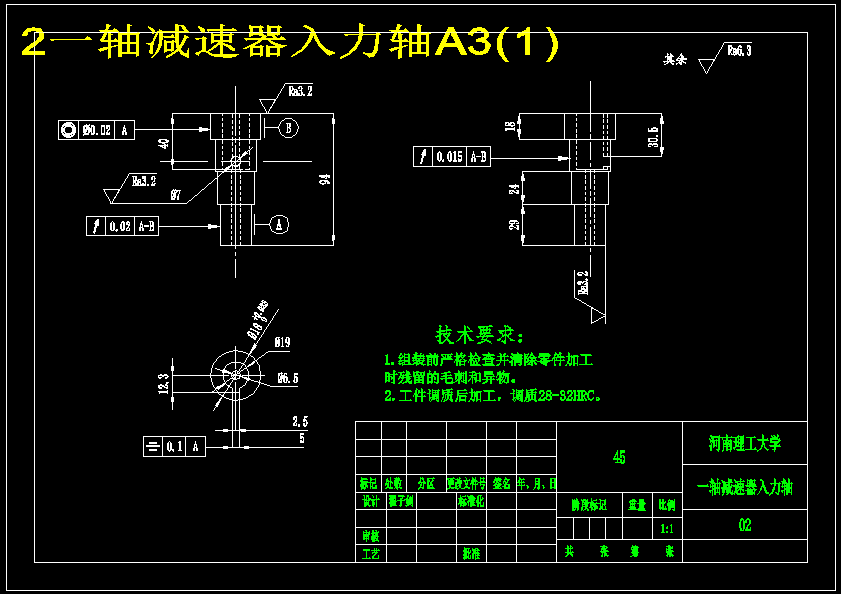
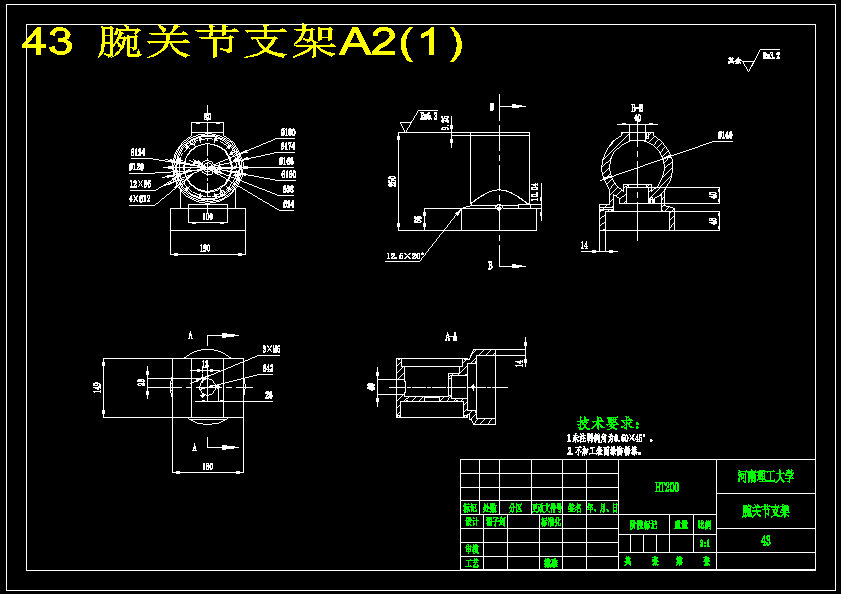
| 22 | 2一轴减速器入力轴A31.dwg | 64.47K |
| 23 | 2一轴减速器入力轴A31.png | 15.78K |
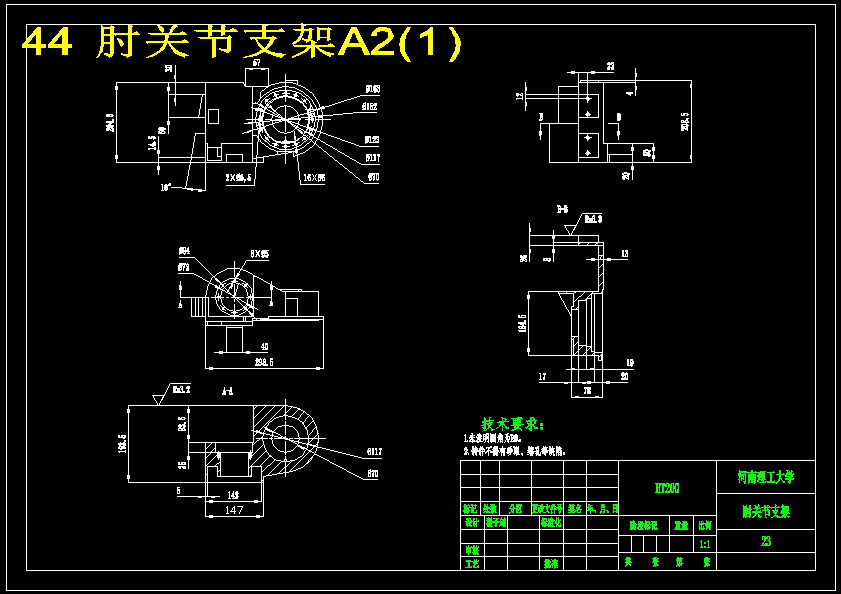
| 24 | 3二轴减速器A31.dwg | 57.09K |
| 25 | 3二轴减速器A31.png | 13.13K |
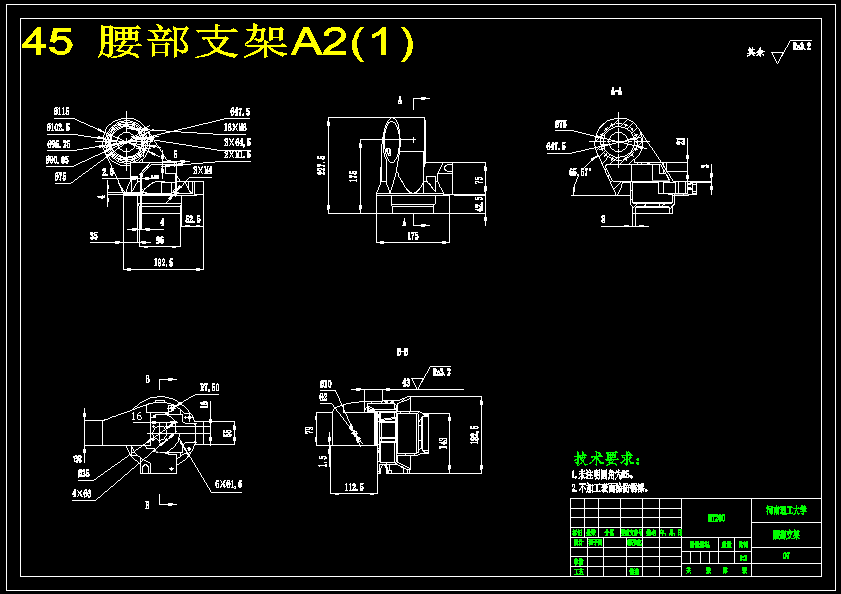
| 26 | 41小臂支架A21.dwg | 93.63K |
| 27 | 41小臂支架A21.png | 13.02K |
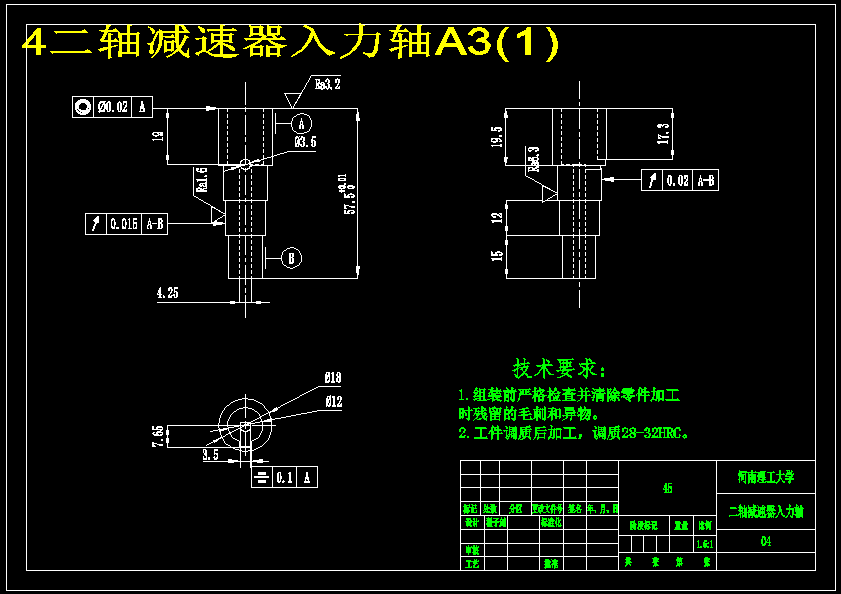
| 28 | 42大臂支架A21.dwg | 129.50K |
| 29 | 42大臂支架A21.png | 13.99K |
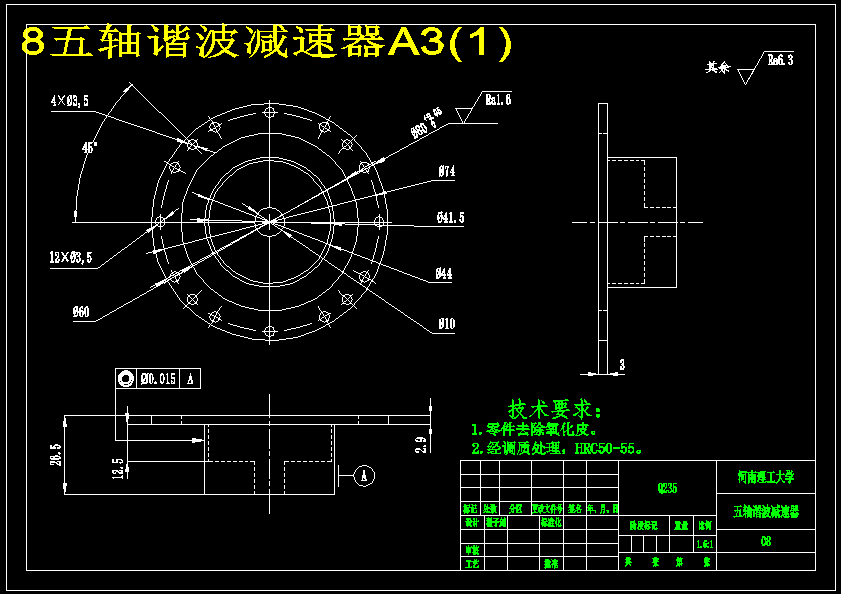
| 30 | 43腕关节支架A21.dwg | 88.66K |
| 31 | 43腕关节支架A21.png | 15.08K |
| 32 | 44肘关节支架A21.dwg | 82.66K |
| 33 | 44肘关节支架A21.png | 15.66K |
| 34 | 45腰部支架A21.dwg | 129.72K |
| 35 | 45腰部支架A21.png | 16.13K |
| 36 | 4二轴减速器入力轴A31.dwg | 64.47K |
| 37 | 4二轴减速器入力轴A31.png | 14.79K |
| 38 | 8五轴谐波减速器A31.dwg | 62.72K |
| 39 | 8五轴谐波减速器A31.png | 18.59K |
| 40 | DH.avi | 498.57M |
| 41 | DH1.avi | 498.57M |
| 42 | 361404010105_翟子剑_五自由度机器人的机构设计_全文标红报告.pdf | 270.13K |
| 43 | 361404010105_翟子剑_五自由度机器人的机构设计_简版报告.pdf | 256.74K |
| 44 | 毕业实习报告.doc | 93.91K |
| 45 | 五自由度机器人的机构设计.doc | 977.59K |
| 46 | 五自由度机器人的机构设计.docx | 665.19K |
| 47 | 五自由度机器人的机构设计.pdf | 719.69K |
此图纸下载需要250金币
立即下载
发布者
代做设计 微加chen_hao185
创作: 24911
粉丝: 709
加入时间:2023-06-16

模型信息
图纸格式:sldasm,stp,dwg,pdf
文件大小:24.82M
所需金币:250
上传时间:2023-12-16 01:54:53
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
猜你喜欢
0.png)
0.png)
0.jpg)
0.png)
0.jpg)
0.png)
0.png)
0.png)
0.png)
0.png)
0.jpg)
0.png)
0.png)