
登录注册
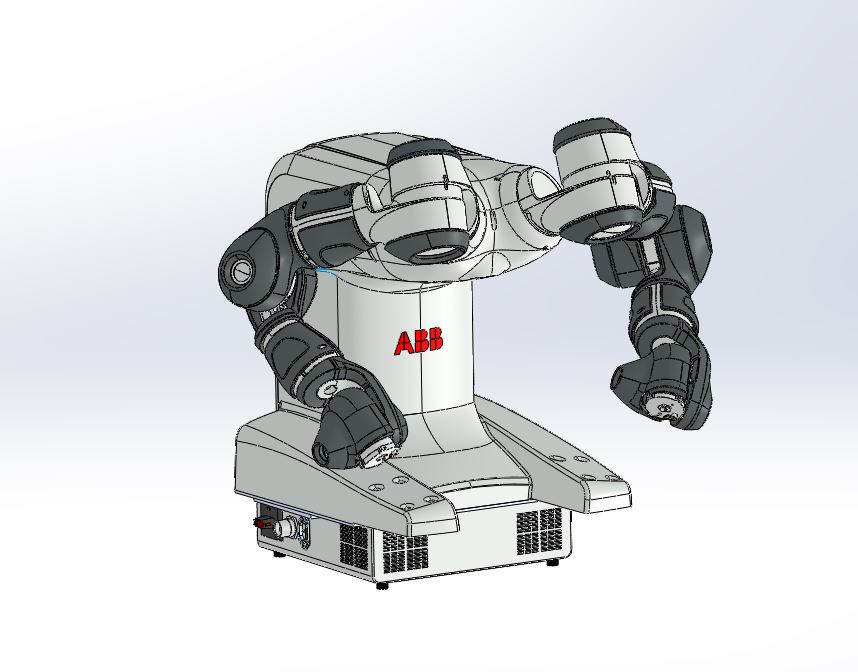
ABB IRB14000 YuMi双臂协作机器人3D模型(ID:986867)
1.png)
2.png)
3.png)

0.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1709456301437.zip | 97.55M |
| 2 | 1351552_20190610144534.jpg | 23.44K |
| 3 | ABB_IRB_14000_yumi.rar | 97.53M |
| 4 | 3HAC051599-0011.SLDPRT | 316.46K |
| 5 | 3HAC052976-001.SLDPRT | 993.61K |
| 6 | HandBase.SLDPRT | 5.33M |
| 7 | IRB14000.JPG | 67.82K |
| 8 | IRB14000.SLDASM | 17.75M |
| 9 | IRB14000_rev00_BASE.SLDPRT | 13.88M |
| 10 | IRB14000_rev00_Link1_L.SLDPRT | 1.55M |
| 11 | IRB14000_rev00_Link1_R.SLDPRT | 1.56M |
| 12 | IRB14000_rev00_Link2_L.SLDPRT | 3.55M |
| 13 | IRB14000_rev00_Link2_R.SLDPRT | 3.56M |
| 14 | IRB14000_rev00_Link3_L.SLDPRT | 1.75M |
| 15 | IRB14000_rev00_Link3_R.SLDPRT | 1.78M |
| 16 | IRB14000_rev00_Link4_L.SLDPRT | 2.85M |
| 17 | IRB14000_rev00_Link4_R.SLDPRT | 2.86M |
| 18 | IRB14000_rev00_Link5_L.SLDPRT | 1.78M |
| 19 | IRB14000_rev00_Link5_R.SLDPRT | 1.79M |
| 20 | IRB14000_rev00_Link6_L.SLDPRT | 1.76M |
| 21 | IRB14000_rev00_Link6_R.SLDPRT | 1.78M |
| 22 | IRB14000_rev00_Link7_L.SLDPRT | 618.15K |
| 23 | IRB14000_rev00_Link7_R.SLDPRT | 615.18K |
| 24 | IRB14000夹臂1.SLDASM | 2.95M |
| 25 | IRB14000_rev00_BASE.STEP | 53.74M |
| 26 | IRB14000_rev00_Link1_L.STEP | 4.84M |
| 27 | IRB14000_rev00_Link1_R.STEP | 4.87M |
| 28 | IRB14000_rev00_Link2_L.STEP | 11.76M |
| 29 | IRB14000_rev00_Link2_R.STEP | 11.82M |
| 30 | IRB14000_rev00_Link3_L.STEP | 6.15M |
| 31 | IRB14000_rev00_Link3_R.STEP | 6.26M |
| 32 | IRB14000_rev00_Link4_L.STEP | 9.54M |
| 33 | IRB14000_rev00_Link4_R.STEP | 9.61M |
| 34 | IRB14000_rev00_Link5_L.STEP | 5.84M |
| 35 | IRB14000_rev00_Link5_R.STEP | 5.87M |
| 36 | IRB14000_rev00_Link6_L.STEP | 5.17M |
| 37 | IRB14000_rev00_Link6_R.STEP | 5.22M |
| 38 | IRB14000_rev00_Link7_L.STEP | 1.22M |
| 39 | IRB14000_rev00_Link7_R.STEP | 1.21M |
此图纸下载需要50金币
立即下载
发布者
代做设计 机械类毕业设计
创作: 70357
粉丝: 543
加入时间:2024-03-01

模型信息
图纸格式:sldprt,sldasm,step
文件大小:99.89M
所需金币:50
上传时间:2024-03-03 16:58:35
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2016
标签
图纸简介
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
0.png)
0.png)
猜你喜欢
0.png)
0.png)
0.jpg)
0.png)
0.jpg)
0.png)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)

