
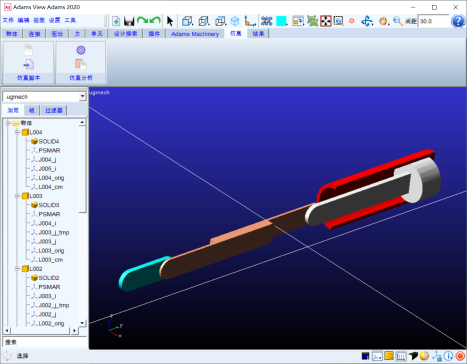
曲柄滑块机构ADAMS仿真
0_0_364.png)
G033736-使用齿条和齿轮的六足机器人=机器人机械臂

0.png)
使用 CATIA V5 进行叶轮设计
0.png)
仿真真实电机的机器人应用电机大型电机-STEPIGES-STL

0.png)
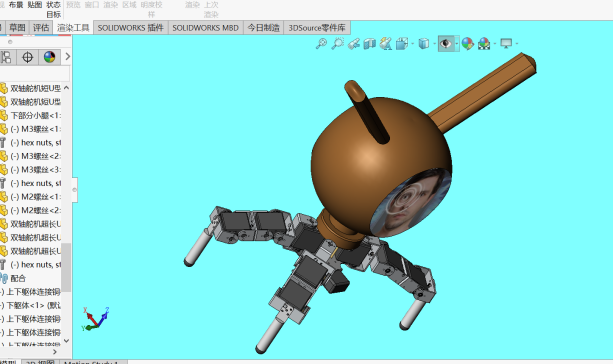
G033730-使用Klann机构的步行机器人=机器人机械臂

0.png)
G033730-使用Klann机构的步行机器人=机器人机械臂
0.png)
1减速齿轮箱-- adams 运动仿真

0.png)
G049259-使用 sheet metal 特性进行叶轮设计=叶轮推进器
0.png)
行进电机联轴器
0.png)
并联机构三维加仿真
0.jpg)
滑块联轴器运动仿真

0_0_364.png)
空间RCCR联轴器solidworks仿真包含仿真和视频文件3D模型

0.png)
G033731-使用LX60电机的机械腿=机器人机械臂
0.jpg)
在我的真空室上使用的中心夹具和钩板
0.png)
电动机后可使用的螺栓联轴器组件--SW
0.png)
使用钢丝和气缸的倍行程滑台

0.png)
施密特联轴器运动仿真
0.jpg)
施密特联轴器运动仿真
0.png)
简易并联机构装配及运动仿真
0.jpg)
模型平面旋转电机-开放,以进行更改和使用在其他项目
0.png)
联轴器 施密特 仿真运动分析

3-cru并联机构含动画仿真

0.png)
X1458-可直接加工使用的链式联轴器三维SW2012无参
四足仿生机构
0.png)
八足仿生机构

0.jpg)
八足仿生机构

0.jpg)
行星齿轮运动仿真
![34HS混合式行星减速步进电机[34HS3404-C16X]](https://html.lazystones.com/lazy/567987/image/a0b4b99f-b484-4007-b5ab-29180e90285a原图(主)0.png)
34HS混合式行星减速步进电机[34HS3404-C16X]
![34HS混合式行星减速步进电机[34HS2403-C10X]](https://html.lazystones.com/lazy/567986/image/19dfe915-118a-4530-b875-042f7f2c267a原图(主)0.png)
34HS混合式行星减速步进电机[34HS2403-C10X]
![23HD混合式行星减速步进电机[23HD6405-C13X]](https://html.lazystones.com/lazy/567971/image/ed4edd3e-3b87-4d4a-8fdd-f2e469380611原图(主)0.png)
23HD混合式行星减速步进电机[23HD6405-C13X]
![23HD混合式行星减速步进电机[23HD4404-C3X]](https://html.lazystones.com/lazy/567968/image/7fba6047-89b5-4171-a098-dbc426d5cbc7原图(主)0.png)
23HD混合式行星减速步进电机[23HD4404-C3X]
![23HD混合式行星减速步进电机[23HD1409-C55X]](https://html.lazystones.com/lazy/567966/image/46d84d86-1424-4ea4-8ceb-ebcd2c2ad196原图(主)0.png)
23HD混合式行星减速步进电机[23HD1409-C55X]
![11HY混合式行星减速步进电机[11HY5401-C19X]](https://html.lazystones.com/lazy/567913/image/725b7262-e7ef-4ba4-9495-db13a9274a86原图(主)0.png)
11HY混合式行星减速步进电机[11HY5401-C19X]
![11HY混合式行星减速步进电机[11HY3401-C5X]](https://html.lazystones.com/lazy/567910/image/bc743f46-6010-4154-a296-0f679b6b6bdc原图(主)0.png)
11HY混合式行星减速步进电机[11HY3401-C5X]
![17HS混合式行星减速步进电机[17HS5005-C5X]](https://html.lazystones.com/lazy/564449/image/526f771a-eb20-4050-a51a-fdbf55a380c2原图(主)0.png)
17HS混合式行星减速步进电机[17HS5005-C5X]
![14HY混合式行星减速步进电机[14HY3001-C5X]](https://html.lazystones.com/lazy/564447/image/17413113-118c-4fae-bbdb-05f68ee56484原图(主)0.png)
14HY混合式行星减速步进电机[14HY3001-C5X]
![14HY混合式行星减速步进电机[14HY0003-C14X]](https://html.lazystones.com/lazy/564444/image/2b919fdb-c1a0-438d-a912-6b3e26c5f68f原图(主)0.png)
14HY混合式行星减速步进电机[14HY0003-C14X]
![34HS混合式行星减速步进电机[34HS3404-C16X]](https://html.lazystones.com/lazy/564462/image/932d54bb-3ddd-4b77-a201-af71433b12f6原图(主)0.png)
34HS混合式行星减速步进电机[34HS3404-C16X]
![34HS混合式行星减速步进电机[34HS2403-C10X]](https://html.lazystones.com/lazy/564461/image/ec6173ab-89db-4ec3-bc61-07c939b0b347原图(主)0.png)
34HS混合式行星减速步进电机[34HS2403-C10X]
0.png)
推瓶机构 格式:SW原格式(带运动仿真)IGS STEP


