
登录注册
遥控多足仿真昆虫爬行机器人
20
0

40
STEP
2023-07-23 14:33
0.png)
机器人和玩具中使用的粗糙款式Mechanum轮-SW-
0
0

60
SOLIDWORKS 2022
2024-12-21 02:47
0.png)
使用ESB进行机器人手臂模拟
3
0

89
SOLIDWORKS
2024-05-17 00:06
0.png)
铁艺仿真行走机器人
24
0
30
STEP
2022-12-07 23:53
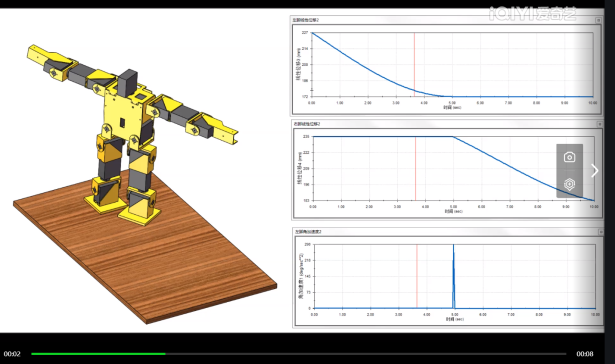
双足机器人设计及仿真
56
2

340
STEP
2024-01-19 14:36
0_0_364.png)
六足仿生机器人3d图 仿生六足爬行蜘蛛机器人sw运动仿真3d模型
34
0

90
SOLIDWORKS 2015
2024-03-13 14:25

仿生多足爬行机器人设计
54
0
20
creo5.0
2022-09-09 09:29
0.jpg)
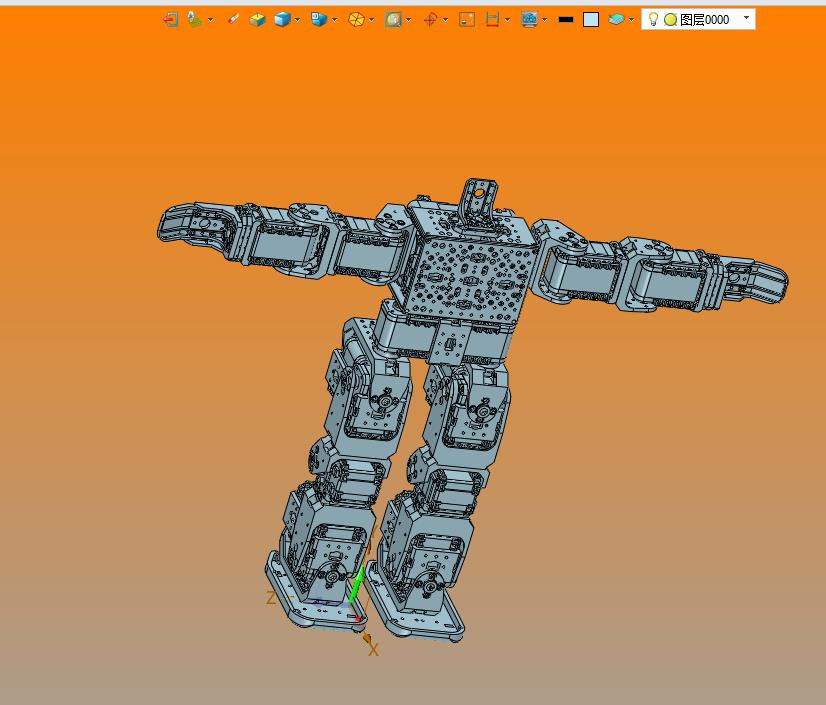
仿人足机器人
47
14

0
SOLIDWORKS 2013
2021-04-29 08:04

使用pokeys57cnc进行控制12
11
0

10
STEP
2025-01-20 10:02
0.png)
使用 ES6CCLEAR 进行组装
1
0
1000
STEP
2025-01-16 20:03
0.png)
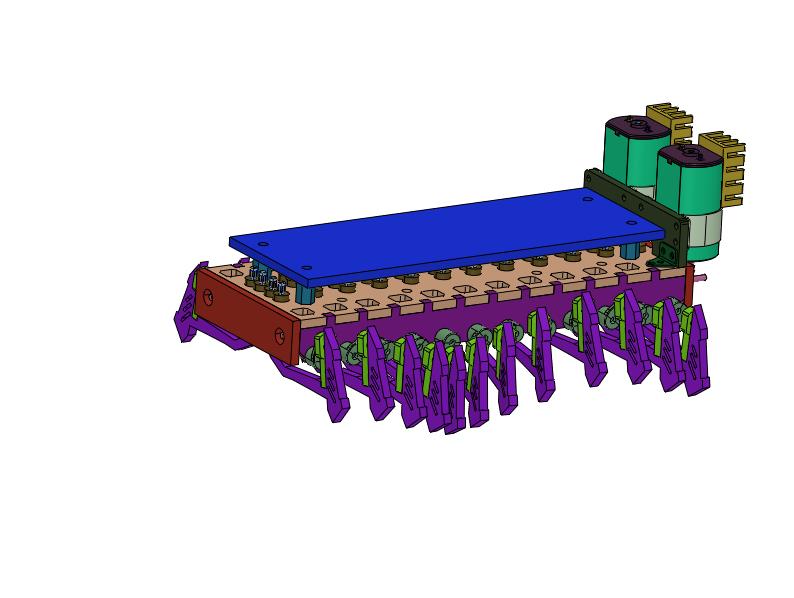
八连杆足式机器人(内置仿真仿真结果文件)
20
0

44
SOLIDWORKS 2018
2024-02-10 01:26
0.png)
六足仿生机器人3d图 仿生六足爬行蜘蛛机器人sw运动仿真3d模型
17
0
140
STEP
2025-05-09 00:05
0.png)
12自由度自足仿生机器人使用树莓派4
8
0
50
IGES
2022-09-20 11:14
0.png)
12自由度自足仿生机器人使用树莓派4
10
0
50
IGES
2022-09-20 14:40
0.jpg)
Robi仿人机器人(进行中)
52
1
0
2021-04-29 05:04
0.png)
G033735-使用臂式机器人进行自动粘胶=机器人机械臂
3
0

10
STEP
2025-06-13 22:29
0.jpg)
盒式仿真器
7
1
0
STEP
2020-11-05 12:11
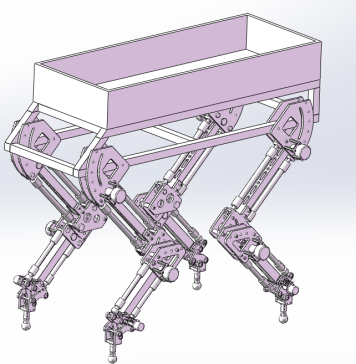
山区搬运用四足仿生机器人
46
0
70
STEP
2023-11-20 23:00
0.png)
手脚融合的多足仿生机器人
59
0
50
STEP
2023-12-13 00:30
0.png)
仿生多足爬行机器人设计
57
0
20
PROE
2022-09-09 01:32
0.jpg)
轮足复合步行机器人
63
2
0
SOLIDWORKS 2014
2020-10-12 03:10
门型动态步行仿人两足机器人
34
0
30
STEP
2024-01-21 14:23
用于hsmworks机器仿真1的haas vf5
0
0

16
SOLIDWORKS 2013
2025-05-30 09:33
0.png)
四足连杆行走机器人3d图纸行走机器人+仿真连杆行走机器人3d图
78
0
90
SOLIDWORKS 2015
2024-03-13 14:42
0.png)
仿真机器人
16
0
7
STEP
2022-11-24 10:21
0.png)
X0685-6轴机器人仿真==288798=20
2
1
19
Parasolid
2024-08-20 19:50
0.png)
G06574-6DOF仿真机器人54
5
0

5
STEP
2025-03-14 18:03
0.jpg)
四足仿生机器人
131
18
0
SOLIDWORKS 2010
2020-10-11 11:10
0.png)
使用CATIA进行零件设计的4-11
10
0
10
CATIA V5R21
2025-01-22 12:48
0.png)
使用Autocad进行轴细节设计
0
0
50
AutoCAD 2018
2025-05-05 20:48
0.png)
足行机器人
4
0
88
SOLIDWORKS 2022
2024-04-29 14:25
0.png)
四足机器人
129
0
12
SOLIDWORKS 2022
2023-07-28 14:50
多关节电机仿真机器人行走
19
0
75
STEP
2022-12-04 17:34
0.png)
W7672-使用单轴驱动器进行转移
4
0
5
STEP
2024-09-26 06:18
0.png)
使用SOLIDWORKS对AMD RYZEN处理器进行3D建模
0
0
50
SOLIDWORKS 2022
2025-05-05 20:49
0.png)
使用单轴驱动器进行转移
4
1
0
SOLIDWORKS 2016
2025-05-28 16:55
0.png)
N002318-真正的男人使用3脚剪影”
1
0
8
STEP
2025-05-23 22:02
仿生四足机器人
7
0

45
SOLIDWORKS 2012
2025-06-05 22:33
3_0_364.png)
六足机器人-三维图-仿真源文件
17
0

10
IGES
2022-12-04 16:04
0.jpg)
用于CFD仿真的水混合器
18
1
0
2020-11-05 11:11

