
登录注册
使用 3、4、5、6 叶片风扇进行实验。
8
0
1000
STEP
2025-01-20 09:35
0.jpg)
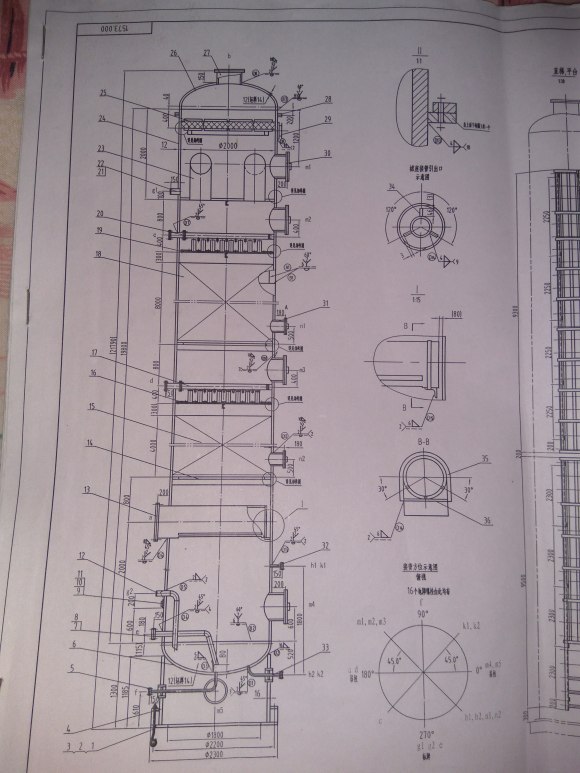
干式变压器仿真
101
31

0
SOLIDWORKS 2015
2020-10-30 04:10
0.png)
使用传感器对模制产品进行箱检查
19
0
12
Parasolid
2023-09-21 19:25
0.png)
使用接近传感器进行的旋转位置检测
35
0
8
SOLIDWORKS 2010
2022-12-20 17:31
0.jpg)
使用接近传感器进行的旋转位置检测
15
1
0
SOLIDWORKS 2010
2020-10-11 10:10
0.png)
变压器仿真
9
0

25
SOLIDWORKS 2015
2022-09-01 22:42
0.png)
变压器仿真
0
0
12
SOLIDWORKS 2015
2025-04-15 21:42
0.png)
UG NX落地风扇摇头运动仿真实例 格式:UG原格式+运动仿真 STP X_T SW
2
0

9
SOLIDWORKS 2020
2024-10-21 11:15
0.png)
仿威图并联式控制柜
31
0

30
STEP
2024-03-20 09:08
G033732-使用Shunk DPG40和工具中心点的Fanuc M100适配器=机器人机械臂
3
0

20
STEP
2025-06-08 09:34
0.png)
G033732-使用Shunk+DPG40和工具中心点的Fanuc+M100适配器=机器人机械臂
5
0

10
STEP
2025-06-13 22:28
0.jpg)
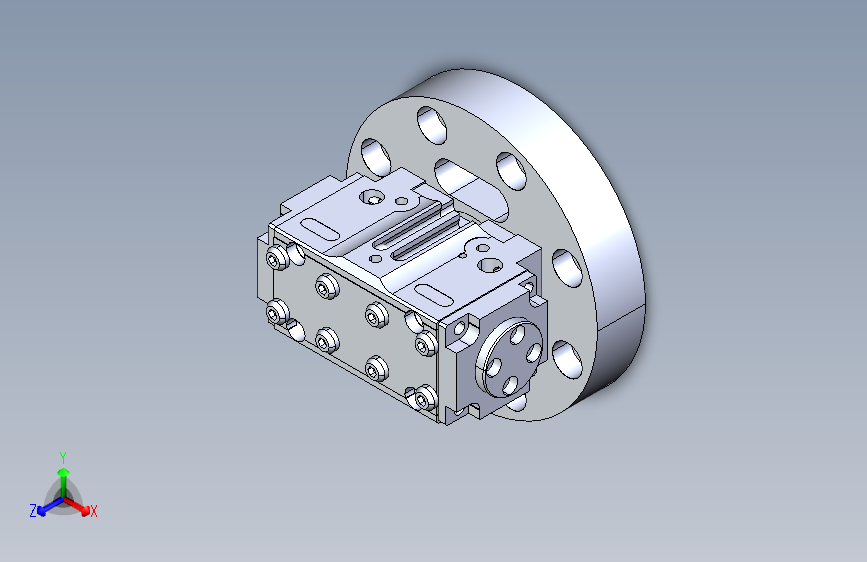
步进电机执行器
17
5
0
STEP
2020-11-22 01:11
0.png)
G029569-SONCEBOZ+7214+执行器=机器人机械臂
4
0
10
STEP
2025-06-09 23:58
0.png)
G034014-锁执行器=机器人机械臂
3
0
10
STEP
2025-06-15 08:01
0.png)
G027890-AK10-9 V2 执行器=机器人机械臂
2
0
20
STEP
2025-06-03 21:39

G029569-SONCEBOZ 7214 执行器=机器人机械臂
4
0
20
IGES
2025-06-05 04:47
0.png)
G027890-AK10-9+V2+执行器=机器人机械臂
3
0
10
STEP
2025-06-07 20:04
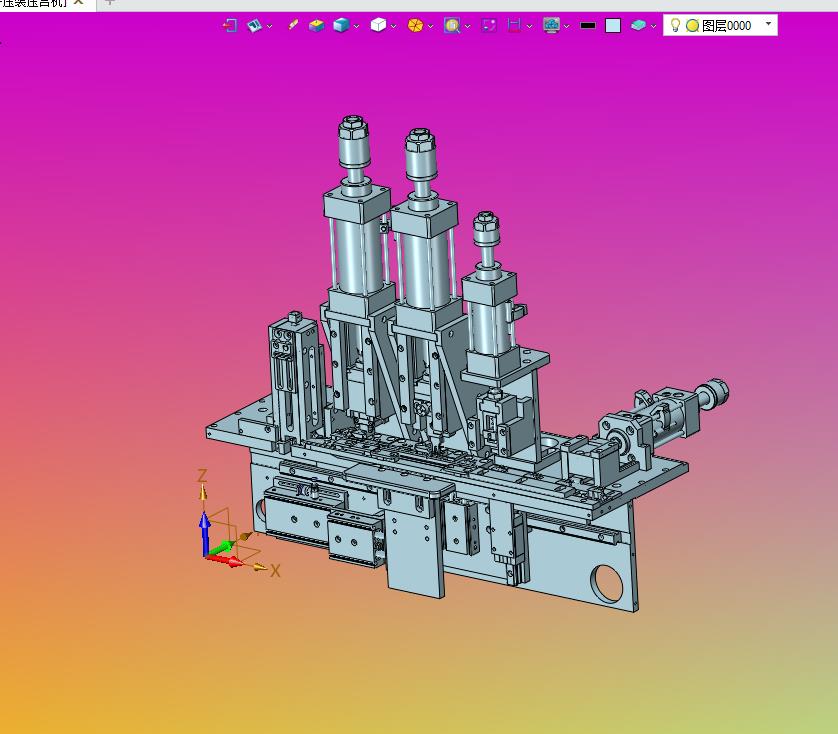
递进式端子压装压合机
13
0
30
STEP
2022-12-04 17:02

