
登录注册
0.png)
仿生多足爬行机器人设计
57
0
20
PROE
2022-09-09 01:32
0.png)
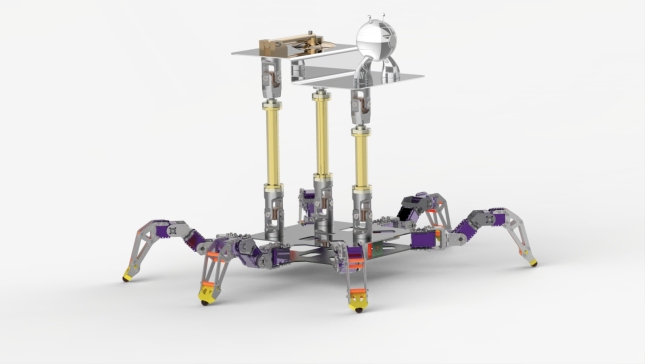
六足 并联机器人 hexapod 格式:STP X_T SW CREO
3
0

8
PROE*CREO 2.0
2024-10-05 09:11
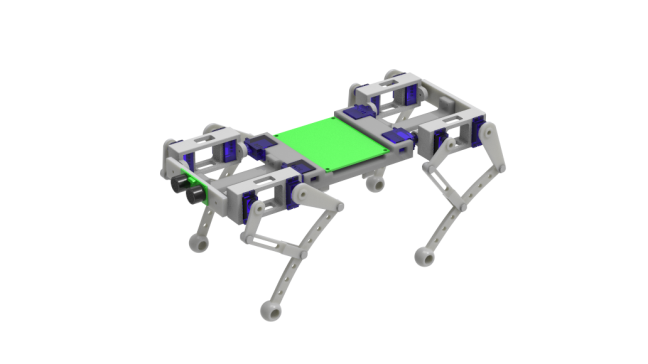
仿生四足机器狗
75
0

200
PROE Creo
2024-05-14 09:47
形仿生机器人双足行走机构设计【PROE】带电路图
35
0

245
PROE*CREO
2024-03-10 15:34
0.png)
多楔带滚子线和皮带机配合使用
14
0

5
PROE
2023-06-15 10:52
0_0_364.png)
仿生机器人的机构设计与运动仿真设计
16
0
240
PROE*CREO Wildfire 3.0
2025-01-26 21:24
0.png)
iRobot Braava 拖地机器人的设计与仿真
29
0
200
PROE*CREO 5
2024-03-11 00:01
0.png)
玩具六足仿生兽带运动仿真三维PROE==535200==35
238
0

35
PROE
2023-12-06 11:12
相机六足机器人
28
2
10
PROE
2023-04-10 14:46
0.png)
仿人机器人上身
50
1
20
PROE
2022-08-04 07:08
0.png)
JX0239 双足步行机器人运动建模研究
61
1

200
PROE
2023-12-23 00:02
0.png)
六足机器人结构
148
0
10
PROE
2023-05-29 20:31
0.png)
简易并联机构装配及运动仿真
83
0
8
PROE
2023-01-10 06:52
0.png)
并联机器人
19
0
14
PROE*CREO 5
2024-06-14 16:50
0.png)
机器人和控制模拟的自行车概念设计
1
0

20
PROE*CREO 4.0
2025-06-06 10:10
0.png)
行星齿轮运动仿真proe设计
21
0

75
PROE*CREO Wildfire 4.0
2024-12-22 14:48
0.png)
挖掘机仿真
52
0
55
PROE*CREO
2024-03-07 09:11
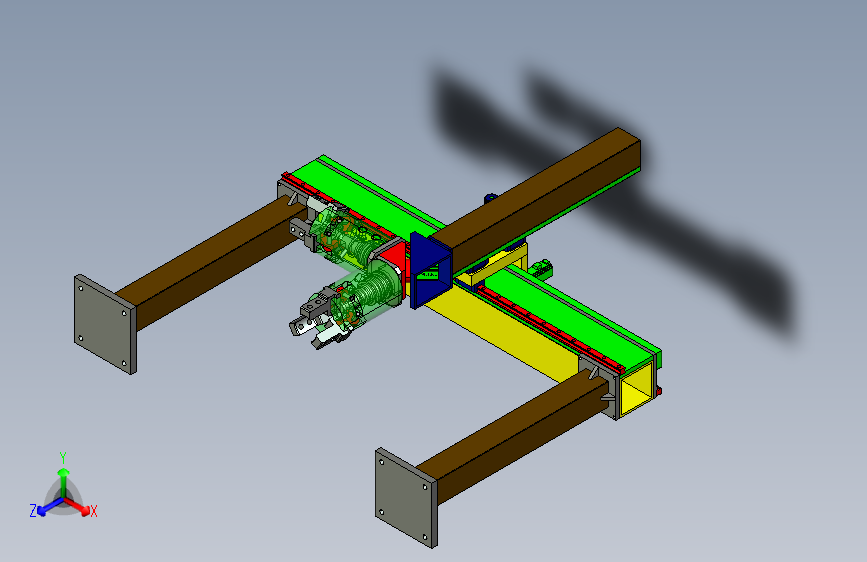
JX332-MAR08 五自由度桁架机器人与PROE仿真设计
3
0

220
PROE*CREO
2024-04-08 19:03
S1060-机械手-两足行走机器人——行走结构部分设计
15
0
10
PROE
2023-11-22 14:59
0.png)
手机支架-有仿真
36
1
90
PROE*CREO 4.0
2024-08-30 22:03
连杆滑块机构仿真(AsmPrt格式
44
0
78
PROE
2024-03-04 22:01

双履带挖掘机建模仿真
13
0
50
PROE*CREO 5.0
2025-04-10 12:28
0_0_364.png)
差速器运动仿真机构
68
1
8
PROE
2023-01-07 15:13
0.png)
昆虫机器人六足动物
69
0
10
PROE
2023-04-01 18:18

仿人形武士机器人模型
42
0
12
PROE
2024-02-21 07:46

