
登录注册
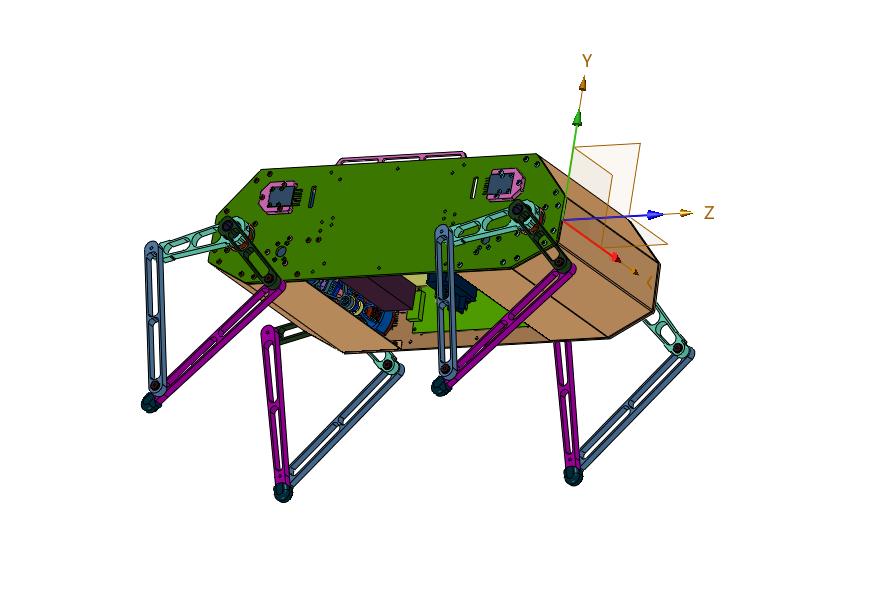
遥控多足仿真昆虫爬行机器人
20
0

40
STEP
2023-07-23 14:33
0.png)
铁艺仿真行走机器人
24
0
30
STEP
2022-12-07 23:53
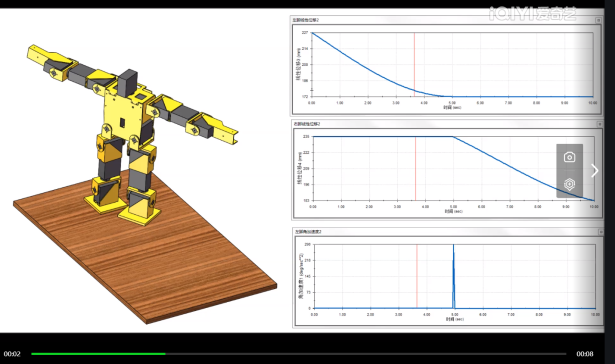
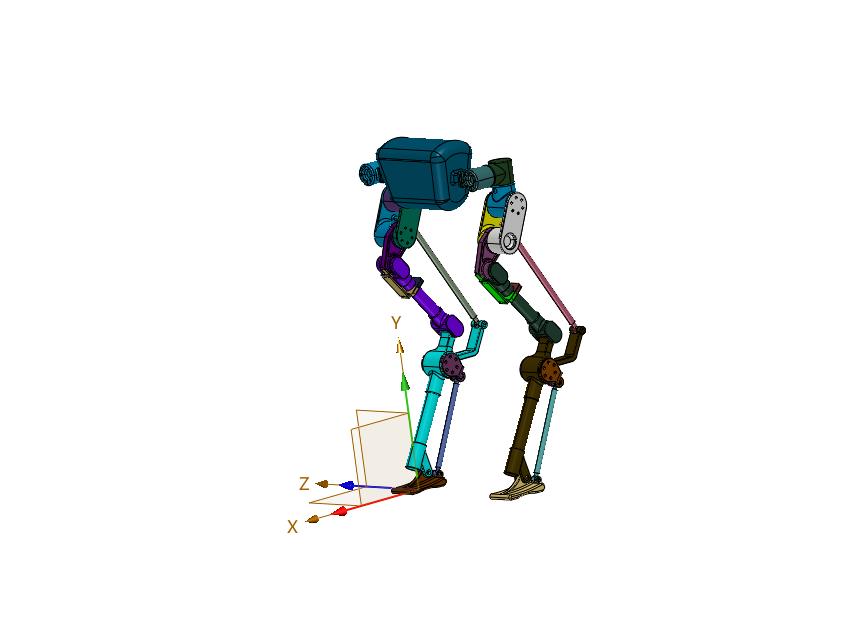
双足机器人设计及仿真
56
2

340
STEP
2024-01-19 14:36

使用pokeys57cnc进行控制12
11
0

10
STEP
2025-01-20 10:02
0.png)
使用 ES6CCLEAR 进行组装
1
0
1000
STEP
2025-01-16 20:03
0.png)
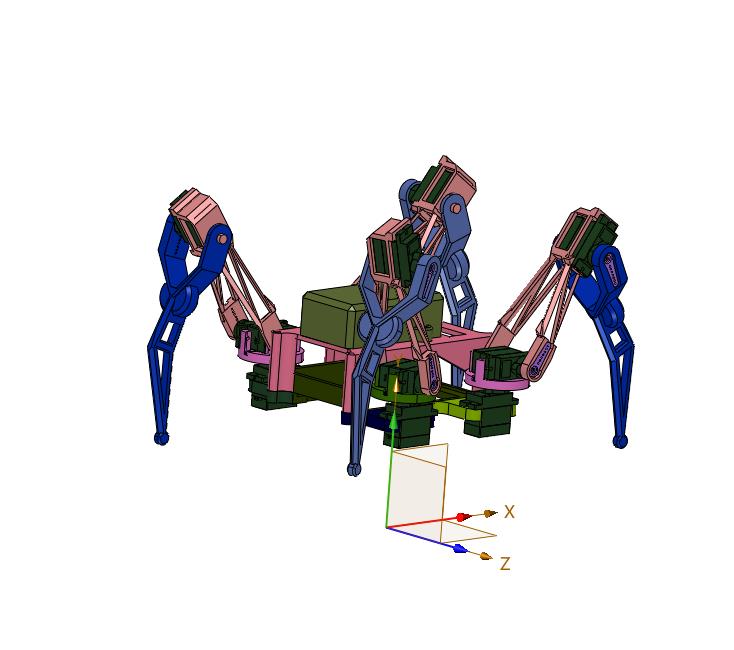
六足仿生机器人3d图 仿生六足爬行蜘蛛机器人sw运动仿真3d模型
17
0

140
STEP
2025-05-09 00:05
0.png)
G033735-使用臂式机器人进行自动粘胶=机器人机械臂
3
0

10
STEP
2025-06-13 22:29
山区搬运用四足仿生机器人
46
0
70
STEP
2023-11-20 23:00
0.png)
手脚融合的多足仿生机器人
59
0
50
STEP
2023-12-13 00:30
门型动态步行仿人两足机器人
34
0
30
STEP
2024-01-21 14:23
0.png)
G01014-使用四轴飞行器无人机进行燃料输送-无人机
1
0

10
STEP
2024-10-19 10:14
0.png)
仿真机器人
16
0
7
STEP
2022-11-24 10:21
0.png)
G06574-6DOF仿真机器人54
5
0
5
STEP
2025-03-14 18:03
0.png)
G16921-使用Solidworks进行无人机建模”+无人机
0
0
5
STEP
2025-05-15 11:31
0.png)
仿真真实电机的机器人应用电机大型电机-STEPIGES-STL
0
0

60
STEP
2024-12-21 01:54
多关节电机仿真机器人行走
19
0
75
STEP
2022-12-04 17:34
0.png)
W7672-使用单轴驱动器进行转移
4
0
5
STEP
2024-09-26 06:18
0.png)
N002318-真正的男人使用3脚剪影”
1
0
8
STEP
2025-05-23 22:02
0.png)
G033730-使用Klann机构的步行机器人=机器人机械臂
5
0
10
STEP
2025-06-13 22:28
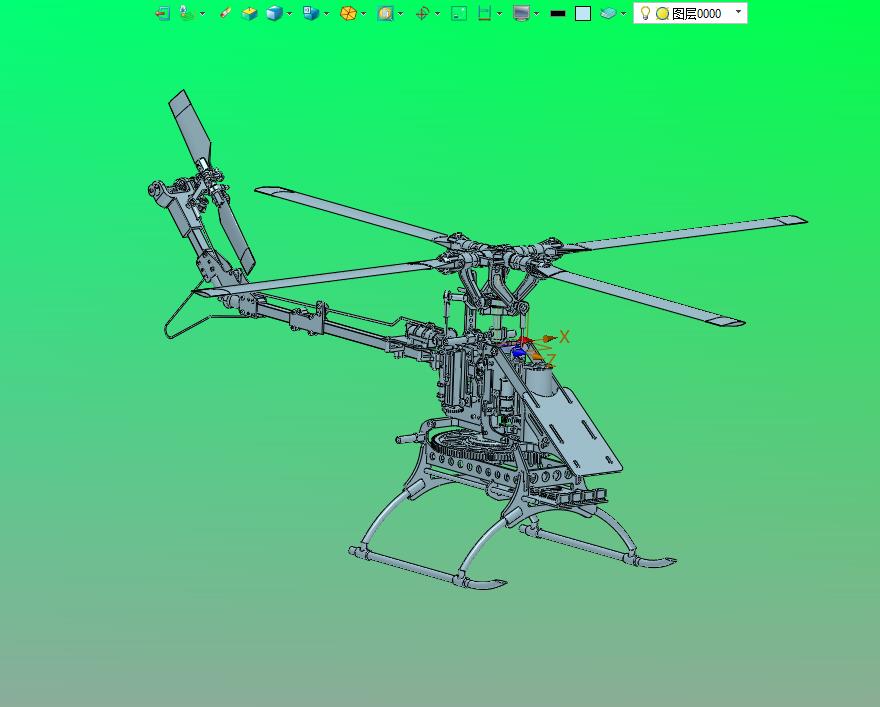
飞行玩具合金遥控直升机仿真机
35
0
70
STEP
2022-12-04 17:42
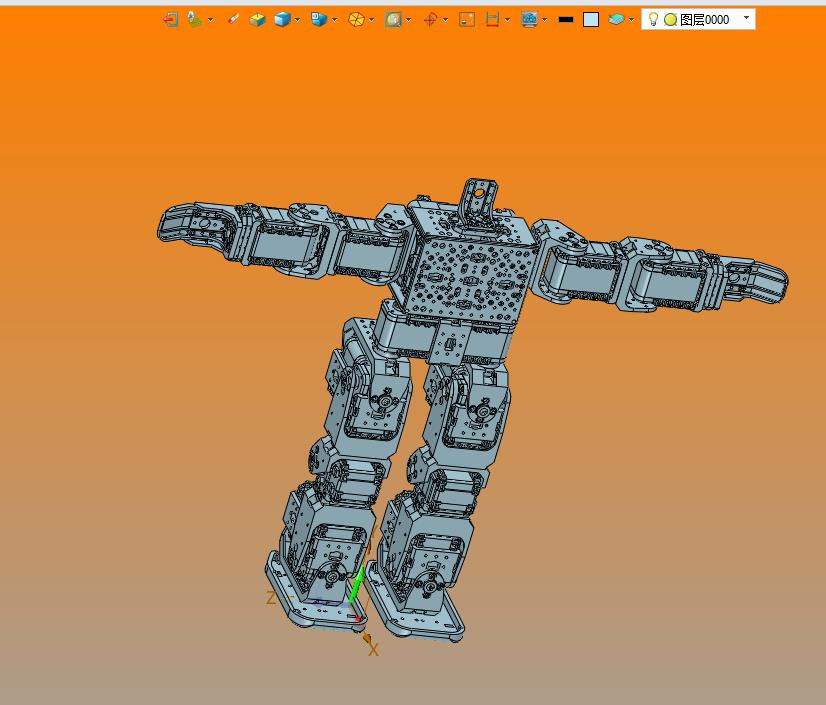
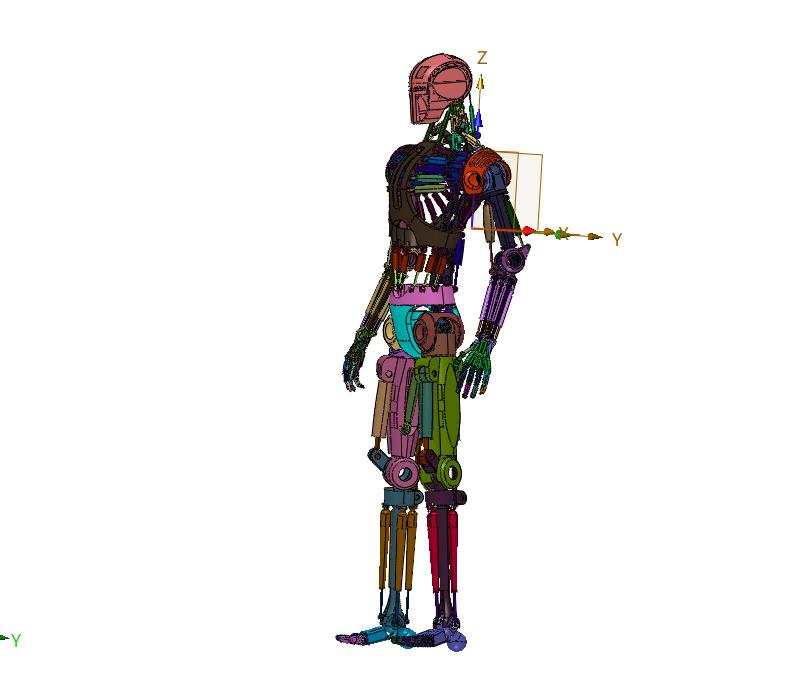
机械智能拟人仿真机器人
1076
0
50
STEP
2023-04-21 18:52
0.png)
生化蚂蚁仿真机器人
100
0
35
STEP
2022-11-25 23:38
0.png)
G028725-Grabby+2(进行中)=机器人机械臂
3
0
10
STEP
2025-06-07 21:57
0.png)
使用单轴驱动器进行转移
16
0

20
STEP
2023-04-05 22:59
空间四足爬行机器人
41
0
50
STEP
2024-01-21 14:00

行走四足机器人
49
2
10
STEP
2023-04-06 09:46
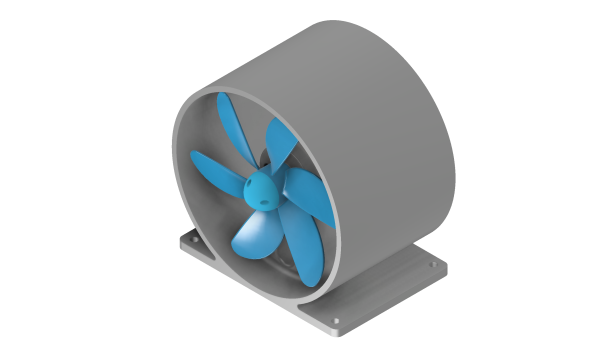
使用 3、4、5、6 叶片风扇进行实验。
8
0
1000
STEP
2025-01-20 09:35
0.png)
N000696-使用SOLIDWORKS进行零件建模设计”
2
0
5
STEP
2025-05-21 23:32
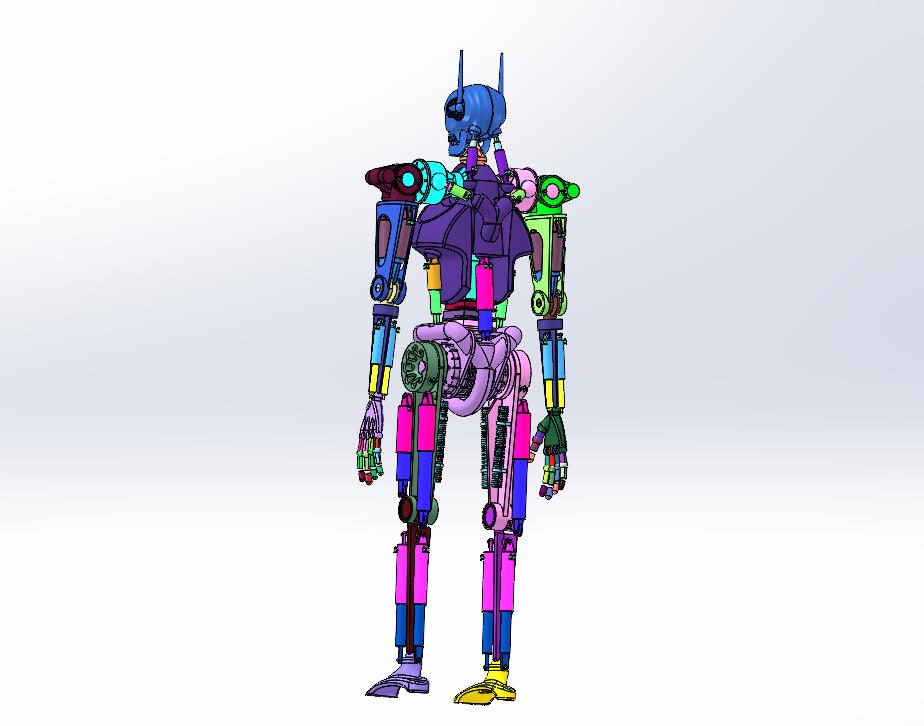
智能仿生仿真人型服务机器人
74
0
100
STEP
2023-08-19 00:15
0_0_364.png)
G029317-Robi人形机器人(正在进行中)=机器人机械臂
0
0
10
STEP
2025-06-10 00:23
0_0_364.png)
G029317-Robi人形机器人(正在进行中)=机器人机械臂
1
0
20
STEP
2025-06-04 21:58
0.png)
使用单轴机器人的中载传送组
0
0
88
STEP
2024-04-01 01:17
0.png)
G027407-5联合机器人臂=机器人机械臂
0
0
10
STEP
2025-06-07 19:07
0.png)
采用全链驱动六足仿生机器人
25
0
75
STEP
2025-04-18 09:44
0_0_364.png)
G032439-检测爬行机器人(进行中...)=机器人机械臂
0
0
10
STEP
2025-06-12 20:38
0_0_364.png)
Human_1A仿真假人模型用于仿真测试运动
53
3
60
STEP
2022-09-18 10:53
0.png)
G029142-NX9机器人仿真=机器人机械臂
0
0
10
STEP
2025-06-10 00:37

四足爬行机器人
19
0

10
STEP
2024-11-29 16:39
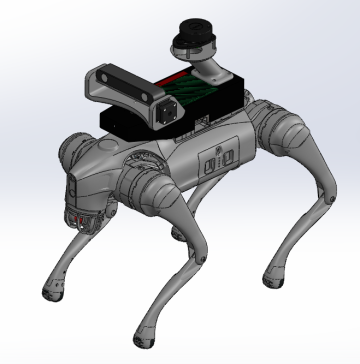
四足爬行机器人
52
1

118
STEP
2025-03-18 07:12
0.png)
迷你机器人scara MG995使用齿条齿轮机构进行垂直移动
31
0
10
STEP
2023-12-16 12:48

