
0.png)
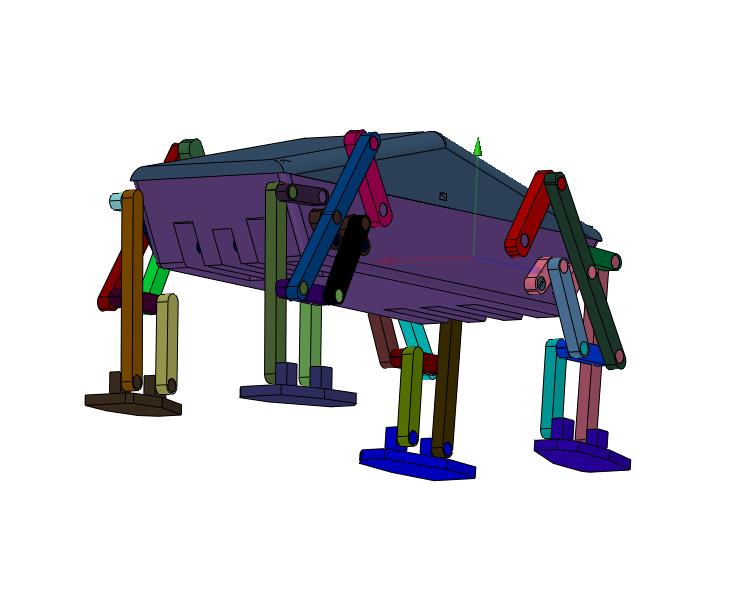
G029397-Robot+Studio_+四足步行机器人详细CAD=机器人机械臂

0.png)
G029397-Robot Studio_ 四足步行机器人详细CAD=机器人机械臂

0.png)
NEMA34标准混合式步进电机

0.jpg)
使用CiV和Keyho设计和渲染瓶子

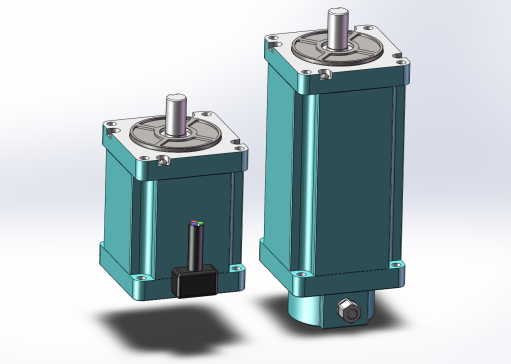
2款110系列三相混合式步进电机

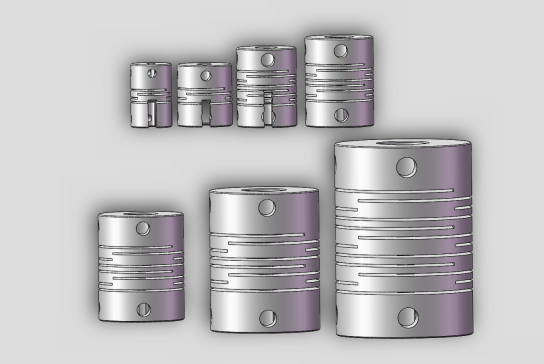
7款DI 铝合金平行线顶丝系列联轴器
0.png)
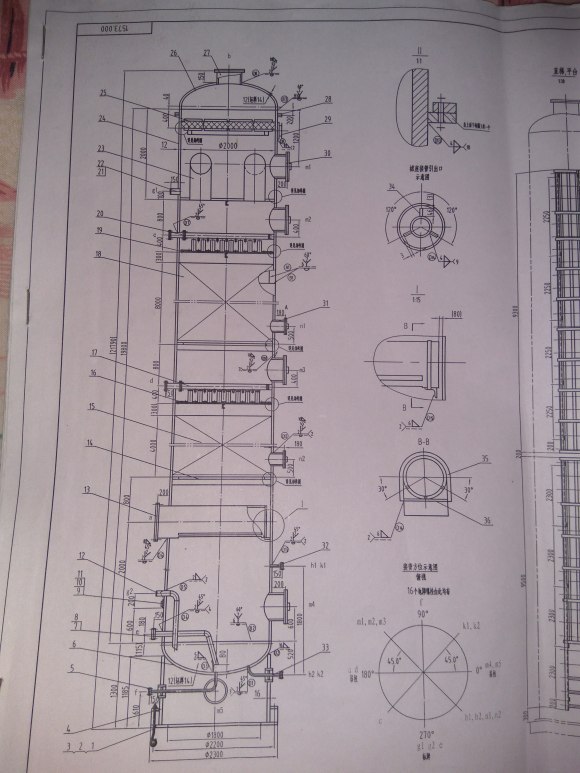
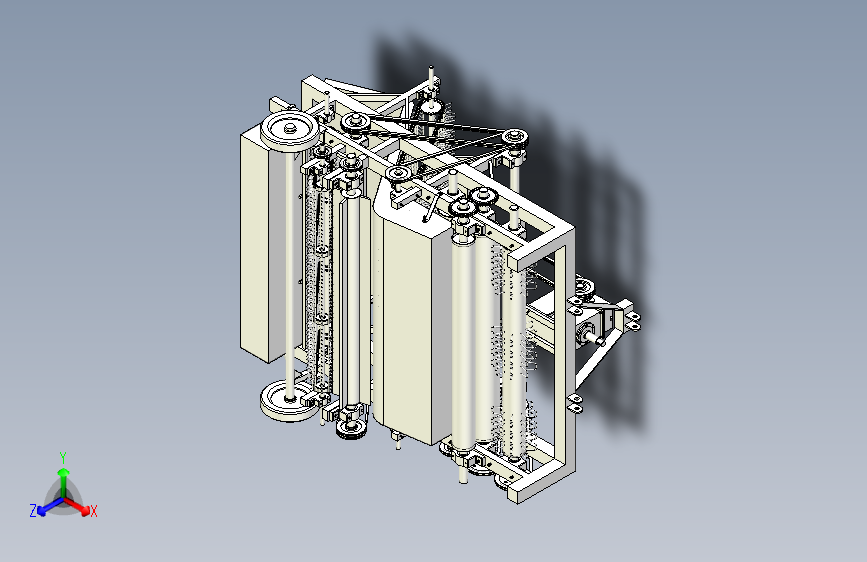
立式加工中心Z轴进给传动设计与仿真

0.png)
G03455-四旋翼飞行器(六轴飞行器)无人机
0.png)
G03455-四旋翼飞行器(六轴飞行器)无人机
0.png)
G18068-适用于HMF+S550六轴飞行器的Tarot+TL65B43伸缩式起落架适配器”+无人机
0.png)
G18068-适用于HMF S550六轴飞行器的Tarot TL65B43伸缩式起落架适配器” 无人机
0.png)
DELTA并联机器人

0.png)
G031043-幻影真人版粉丝制作=机器人机械臂
0_0_364.png)
仿真水果玩具 高仿真香蕉模型


G19200-适用于每架无人机的行李箱” 无人机
小制作四足爬行机器人拼装机械
0.png)
四足机器人机械虎行走玩具模型

0.png)
JX659-四足步行机器人腿的机构设计

0_0_364.png)
E-SMART系列同步套件用于并联使用单元-kit_gk12p001481a

联合工业自行车

0.png)
混联机器人1478311

0.png)
G029956-奥克与纳特+-+机器人步行者=机器人机械臂
0.png)
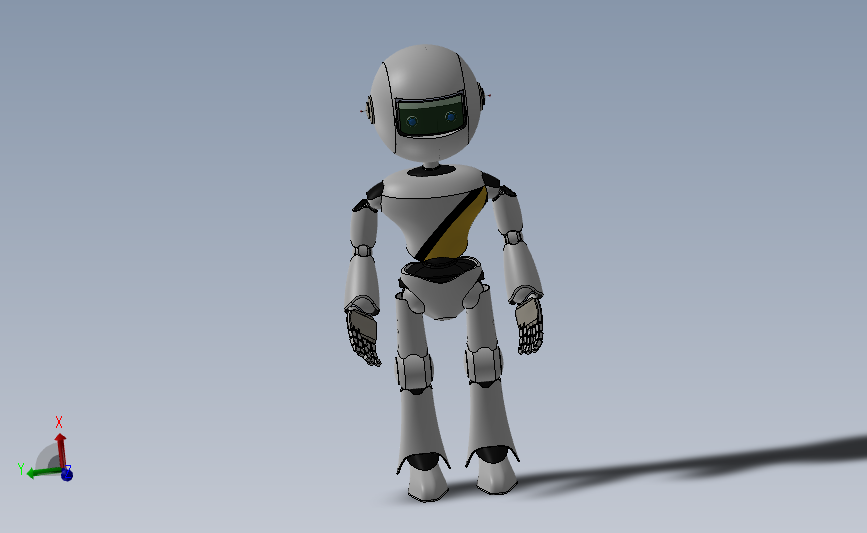
机器人工作室 双足机器人
0_0_364.png)
仿生青蛙跳跃机器人三维SW模型+通用格式
0.png)
基于四杆机构轮足复合式机器人3d图纸全套麦克纳姆四驱轮2d+3d图
0_0_364.png)
拔棉杆粉碎残膜回收联合作业机设计与仿真(sw12可编辑+CAD+说明书)
W3617-拔棉杆粉碎残膜回收联合作业机设计与仿真(sw12可编辑+CAD+说明书)
0.png)
双摆臂履带式搜索机器人行走机构
0.jpg)
机器人头部仿人概念

0.jpg)
仿人手臂机器人DIY
仿生类人迎宾机器人
0.png)
仿生鱼机器人设计
0.png)
G06044-机器人手仿生假手6
0.png)
地球仪模型和运动仿真

0.jpg)
如何使用放样融合工具
0.jpg)
使用混合绘制扭曲部分
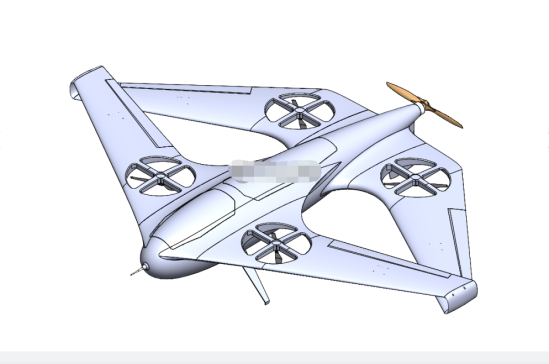
串行翼复合翼无人机1412451===150
0.png)
G026318-使用FlowXpress对保罗的Extra+300垂直安定面进行C.F.D分析(空气)=直升机
0.png)
G026318-使用FlowXpress对保罗的Extra 300垂直安定面进行C.F.D分析(空气)=直升机
0.jpg)
无人机的推进器

