

A0005482-匕首

0.png)
智能眼镜模型=57207=20

0.png)
智能宠物喂食器三维=893672=25
0.png)
直线运动导轨三维模型 =375073=5
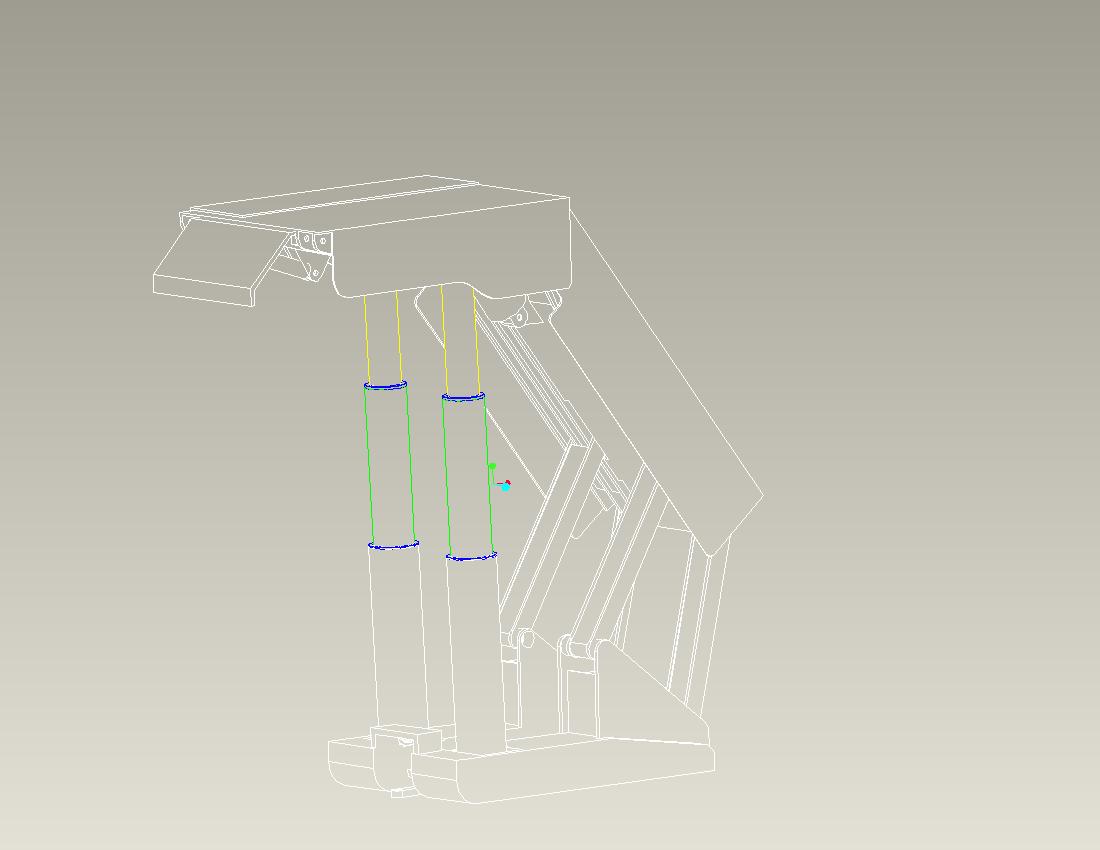
支撑掩护式液压支架的设计【带三维图】=101527=300
0_0_364.png)
运动手环3D=704407=20
0.png)
一种轴类零件铣床夹具=450922=10
0.png)
一款吻合器切割组件=1345199=50
0.png)
一款手术钳=1349850=5
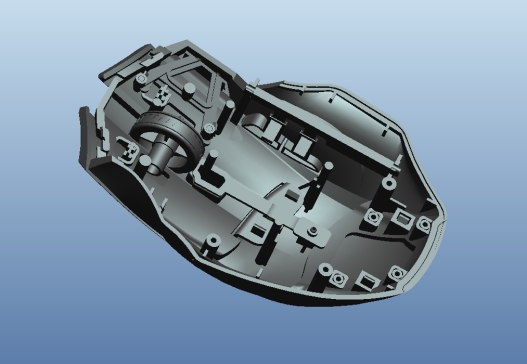
炫酷游戏鼠标=751234=80
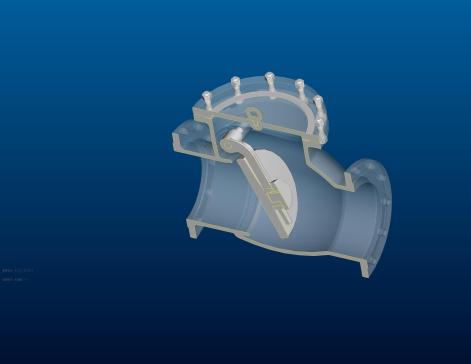
旋启式止回阀 =160035=10
新中式现代简约加湿器香薰机=947247=50
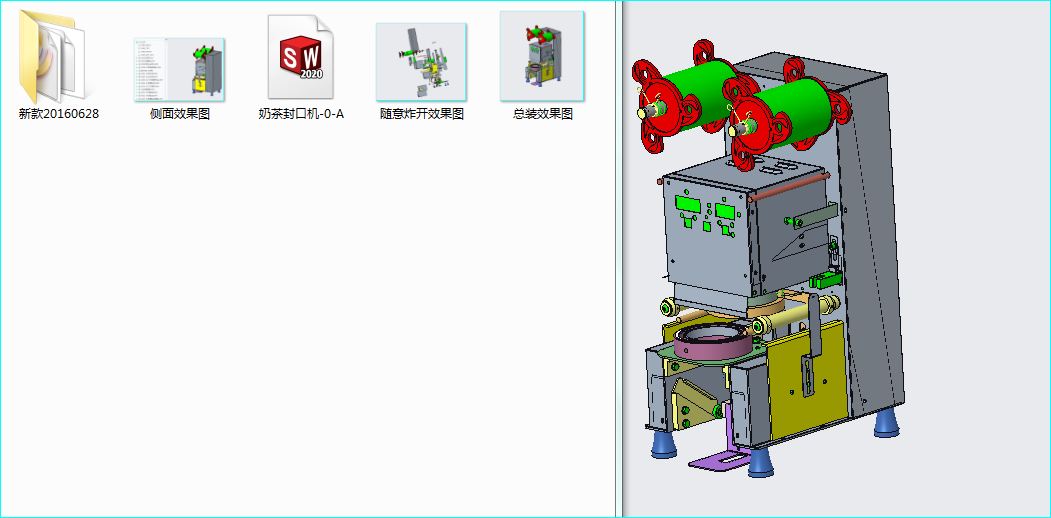
新款奶茶封口机 =1434865=600
0.png)
谐波减速器模型设计图=501430=100
0.png)
小型履带式液压挖掘机底盘履带、支重轮、拖链轮的设计=210014=250
0_0_364.png)
吸尘器卧式机=1469150=500
西班牙超音波雾化器=1501393=150
0.png)
温度传感器 =35727=0
尾座体的钻M6螺纹底孔夹具设计及加工工艺=1078581=330
0.png)
微型投影仪=315296=85
0.png)
微型防水水泵=1549329=30
0.png)
通用标准2节AA电池壳模块设计=223274=10
0.png)
套简零件工艺设计与工艺管理功能模块开发=1446989=300
0.png)
台式冰淇淋=1419074=1000
0.png)
塑料齿轮模具图 =764015=50
0.png)
四自由度码垛机器人=455377=600
0.png)
四种机械手=1530693=120
0_0_364.png)
斯堪尼亚重卡柴油机=264733=10
0.png)
四冲程单缸发动机三维=1184928=50
0_0_364.png)
双缸发动机结构设计及运动仿真【带三维及仿真】=129224=250
0.png)
鼠标——纹理=639066=100
0.png)
输电线路除冰机的设计 =1408230=250
输出轴钻10-Φ20孔夹具设计及加工工艺=1079225=330
0.png)
手持DLP投影机=808615=160
0.png)
三自由度Delta并联机器人的设计与仿真【三维图】=464535=500
0.png)
三路激光熔覆送粉喷嘴=500509=40
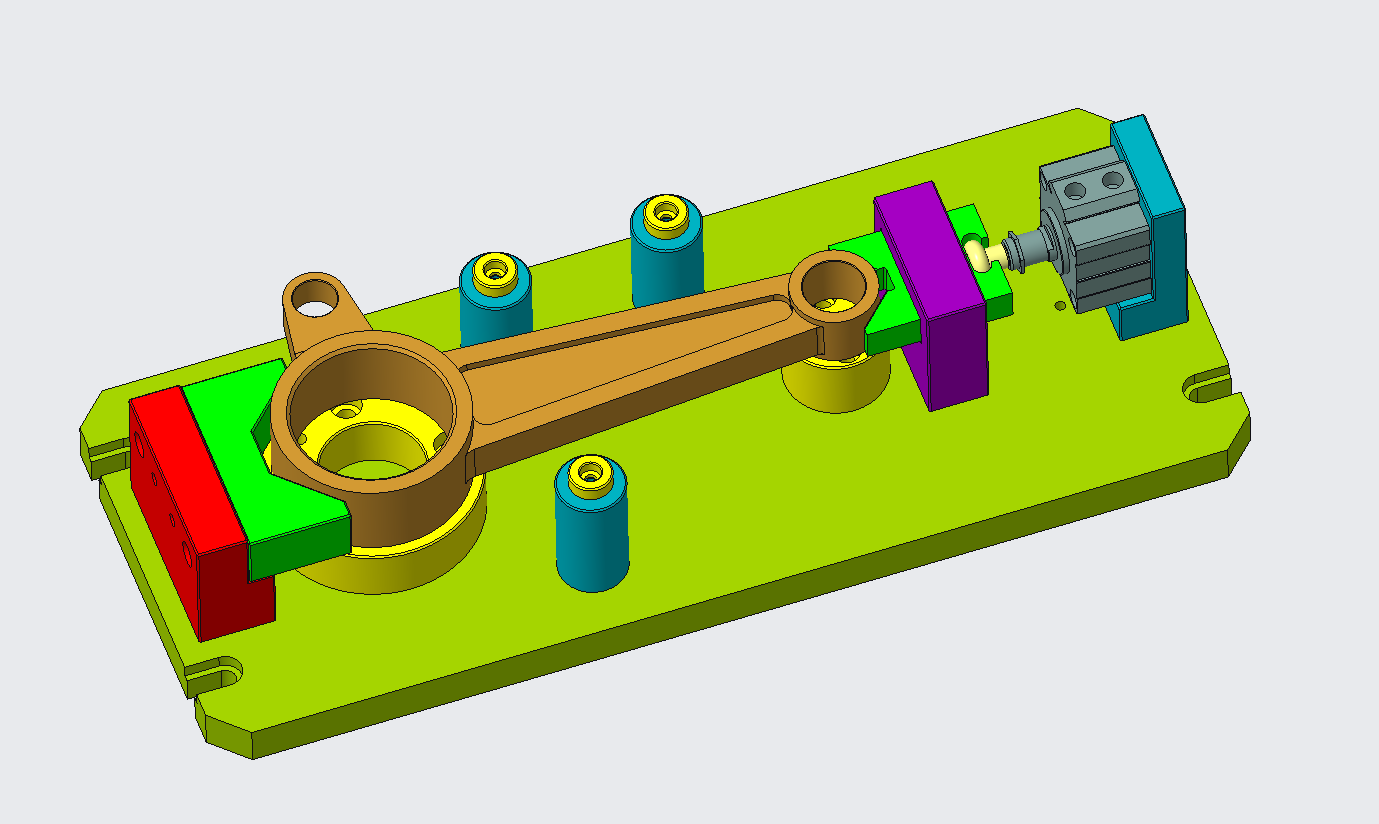
三孔连杆加工工艺及夹具设计=1460189=250
0.png)
库卡KR 40 PA货盘堆垛机器人--268871-15

0.png)
日常用具夹子=688263=40
0.png)
全套某螺杆式空压机三维模型=115495=200

