
登录注册
0.png)
并联机器人 格式:STP X_T SW F3z
1
0

8
SOLIDWORKS 2020
2024-10-05 09:06
0.png)
IRB 920T__四轴机器人,载荷6公斤,适用于灵活使用
0
0
750
SOLIDWORKS 2015
2024-10-22 15:44
单电机四足仿生机器人套件
153
5

30
STEP
2023-09-19 23:49
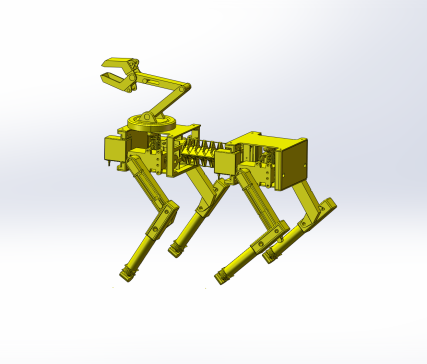
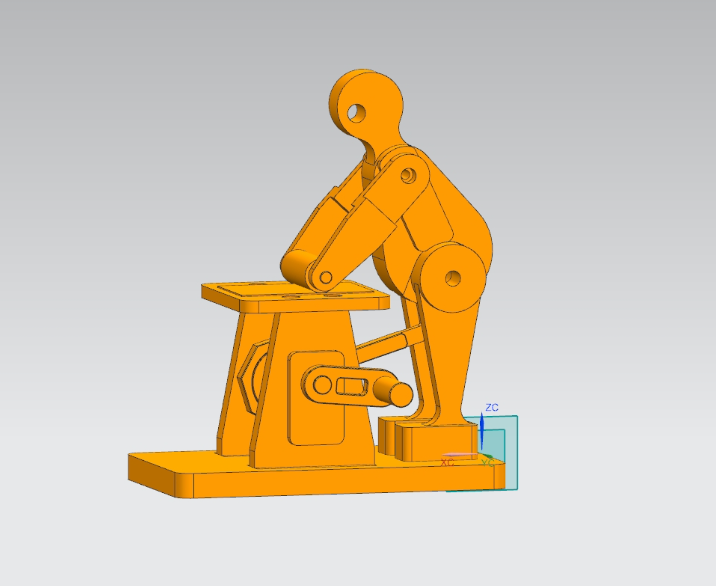
仿生猎豹四足机器人机械手
45
0

250
SOLIDWORKS 2018
2024-09-11 17:17
0.png)
仿生六足机器人机构的设计
9
0

180
AutoCAD 2010
2025-04-11 21:24
0.png)
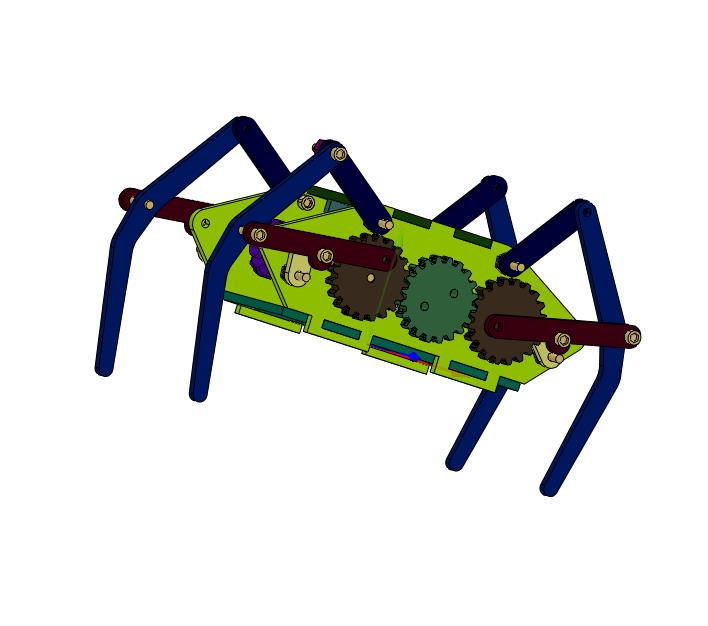
六足蜘蛛机器人
202
1

90
SOLIDWORKS 2016
2022-10-23 11:39
0.png)
G035238-自平衡和避障机器人使用PID控制=机器人机械臂
2
0
10
STEP
2025-06-15 10:20
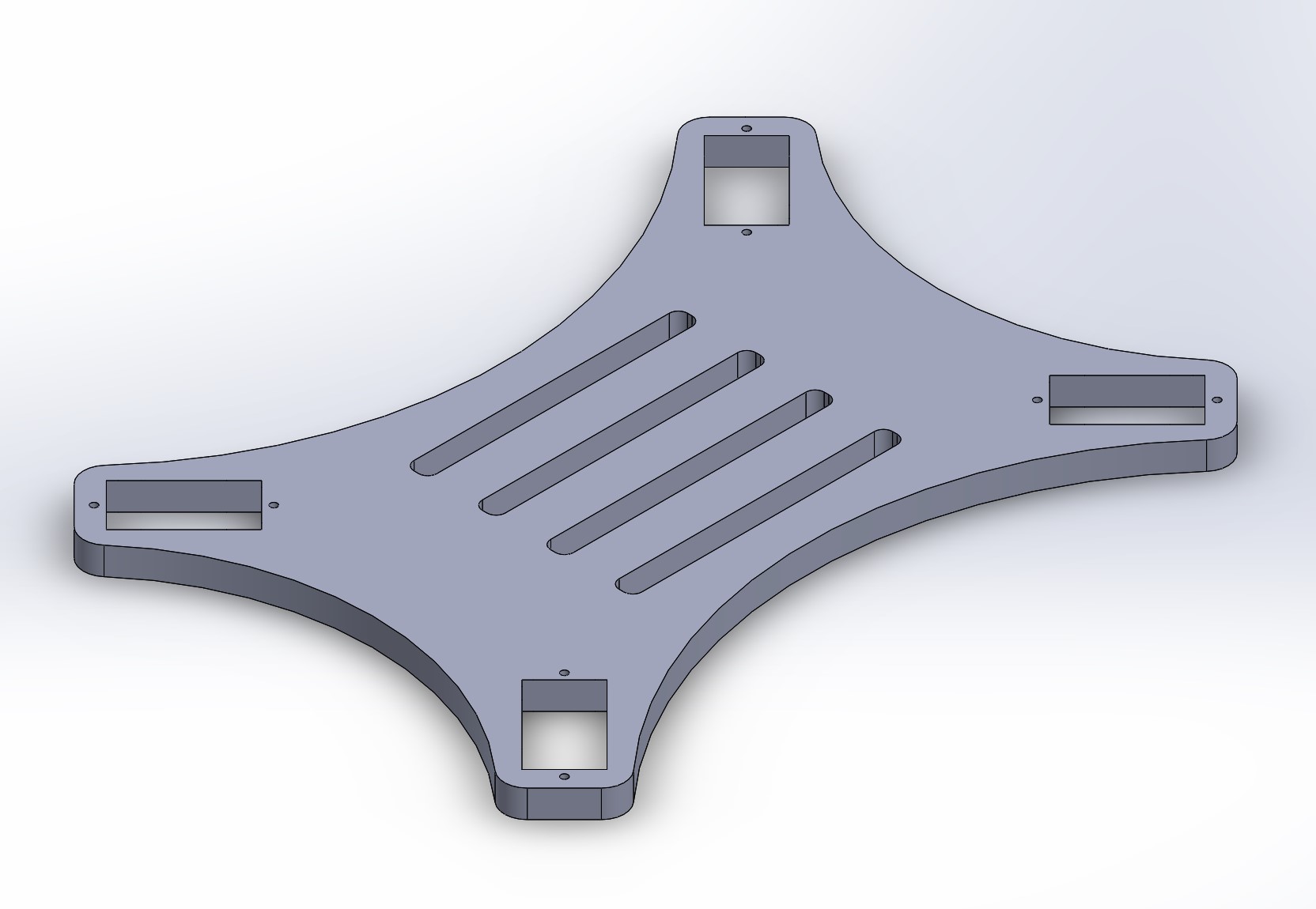
仿生四足机器狗
75
0

200
PROE Creo
2024-05-14 09:47
0.png)
四足仿生机器马
8
0

70
SOLIDWORKS 2023
2025-01-01 22:44
0.png)
使用FreeCAD对洗发水瓶进行建模
10
0

50
STEP
2025-05-05 20:48
0.png)
G032908-轮式足球机器人=机器人机械臂
1
0
10
STEP
2025-06-12 21:15
0.png)
施密特联轴器运动仿真
28
0

58
UG NX 8
2024-03-07 07:46
0.jpg)
施密特联轴器运动仿真
10
0

0
UG
2020-10-12 12:10
0.png)
G031354-机器人3自由度仿真+MATLAB=机器人机械臂
0
0
10
STEP
2025-06-12 19:27

G031354-机器人3自由度仿真 MATLAB=机器人机械臂
3
0

20
SOLIDWORKS 2021
2025-06-06 11:06
0.png)
简易并联机构装配及运动仿真
8
0
88
SOLIDWORKS 2014
2024-03-31 18:09
0.png)
轮式双足平衡机器人
103
6
7
IGES
2022-11-12 17:02
0.png)
使用RevolveLoftExtrudeCircular Pattern等功能进行建模的Autodesk Fusion 360教程
5
0
60
STEP
2025-03-29 00:06
形仿生机器人双足行走机构设计【PROE】带电路图
35
0
245
PROE*CREO
2024-03-10 15:34
0_0_364.png)
四足爬行机器人简易模型
26
0
18
SOLIDWORKS 2019
2024-02-27 23:40
0.png)
Hexapod robot六足蜘蛛爬行机器人
209
3
58
SOLIDWORKS 2022
2023-12-24 15:34
六足步行沙地运载机器人
28
0
40
STEP
2023-10-26 11:38
0.png)
四足爬行机器人sw18可编辑
57
0

45
SOLIDWORKS 2018
2023-01-31 09:24
0.jpg)
契贝谢夫四足行走机器人
38
0
50
2021-11-04 12:11
0.png)
使用传感器对模制产品进行箱检查
19
0
12
Parasolid
2023-09-21 19:25
减速箱模型和仿真
17
0

60
UG 10
2024-01-14 21:44
0.png)
亚足联奖杯
43
0
10
SOLIDWORKS 2018
2023-04-27 13:45
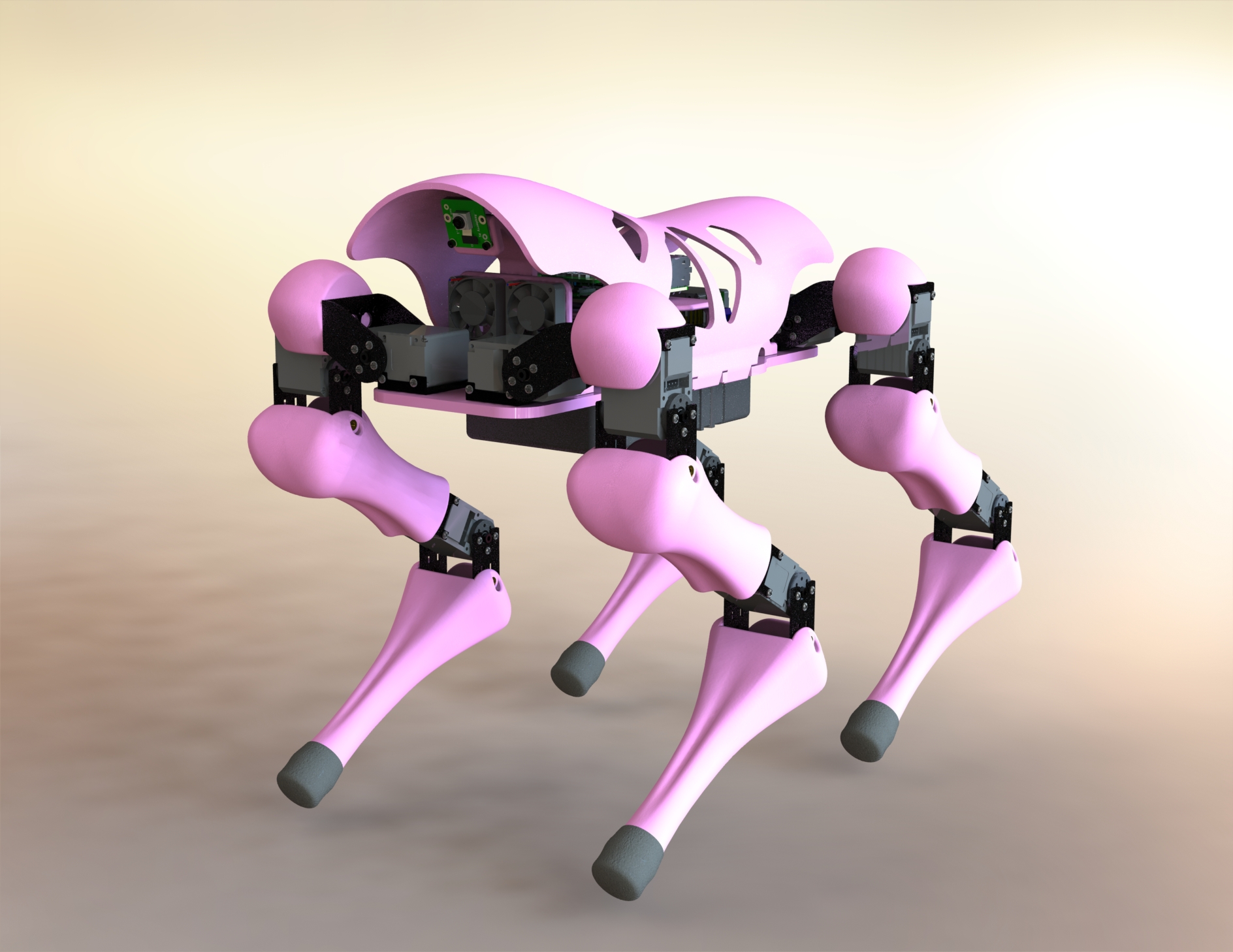
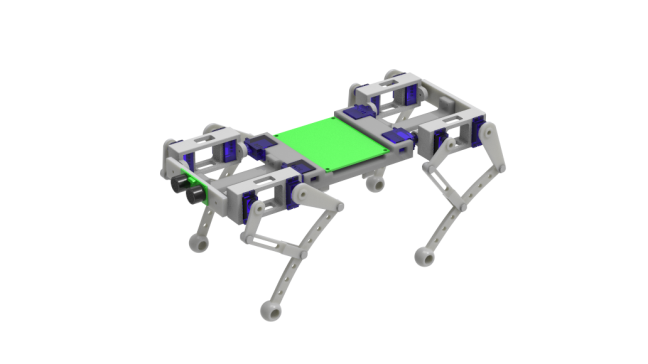
Pinkparter四足机器人
87
0
50
SOLIDWORKS 2021
2022-08-31 14:58
0.png)
G045216-使用Arduino Uno进行身高测量=集装箱容器
0
0
20
SOLIDWORKS 2023
2025-06-10 21:32
0.png)
自行车变速器可配合飞轮等使用
26
0
50
STEP
2022-09-20 11:56
0.png)
自行车变速器可配合飞轮等使用
10
0
60
STEP
2022-09-20 10:49
0.png)
蓝色机器人T200推进器 使用PE 1000材料的概念自主水下车设计(AUV)
6
0
50
STEP
2025-05-05 20:21
0.png)
人类仿真手臂
309
62
0
SOLIDWORKS 2018
2022-05-07 05:23
CAE擀面小人运动仿真
200
1

18
STEP
2024-03-03 21:14
G033977-四足爬行机器人=机器人机械臂
1
0
20
SOLIDWORKS 2021
2025-06-08 10:12
0.png)
G033937-四足步行机器人=机器人机械臂
1
0
10
STEP
2025-06-13 22:41
0.png)
G033977-四足爬行机器人=机器人机械臂
3
0
10
STEP
2025-06-13 22:42
0.png)
使用AutoCAD和SolidWorks进行3D设计的工程力学学生-SW-
0
0
60
SOLIDWORKS 2019
2024-12-21 05:49
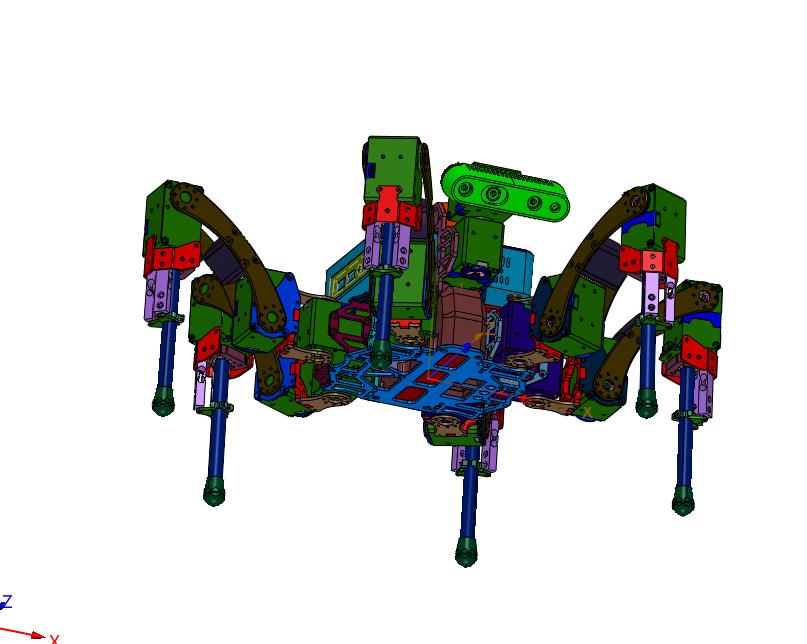
全地面六足直立式步行机器人
40
0
80
STEP
2023-12-13 00:26
0.jpg)
工厂中使用的机器人手臂
17
1
0
SOLIDWORKS 2016
2020-11-21 09:11

