
登录注册
0.png)
并联机器人Stewart 平台3 格式:SW STP X_T
3
0

8
SOLIDWORKS 2022
2024-10-05 09:07
0_0_364.png)
仿生机器人的机构设计与运动仿真设计
16
0

240
PROE*CREO Wildfire 3.0
2025-01-26 21:24
0.jpg)
咖啡袖和可重复使用的上衣
37
0

0
2020-10-12 08:10
0.jpg)
平衡机器人使用激光切割和3D印刷部分
32
3
0
SOLIDWORKS 2016
2021-03-11 12:03
0_0_364.png)
G032319-基本的WIFI操纵杆使用ESP32=机器人机械臂
0
0

10
STEP
2025-06-12 20:31
0.png)
Harward仿生昆虫飞行机器人
73
0
50
SOLIDWORKS 2020
2022-08-31 08:40

四足仿生ESP32机器狗智能编程机器人
42
0

50
STEP
2023-08-18 22:18
0.png)
G01108-无人机(使用arduino+uno)-无人机
0
0

10
STEP
2024-10-19 10:22
0_0_364.png)
四足爬虫机器人
92
0
25
SOLIDWORKS 2022
2023-07-28 15:03
0_0_364.png)
悬臂式掘进机三维SW模型+仿真动画
37
0

390
SOLIDWORKS 2021
2024-05-29 10:40
0.png)
iRobot Braava 拖地机器人的设计与仿真
29
0
200
PROE*CREO 5
2024-03-11 00:01

工业机器人MCD运动仿真项目三维UG12.0带参
5
0
30
UG 12.0
2024-08-25 08:58
0.png)
水下清淤机器人三维含仿真视频
55
0
400
SOLIDWORKS 2018
2024-05-31 09:58
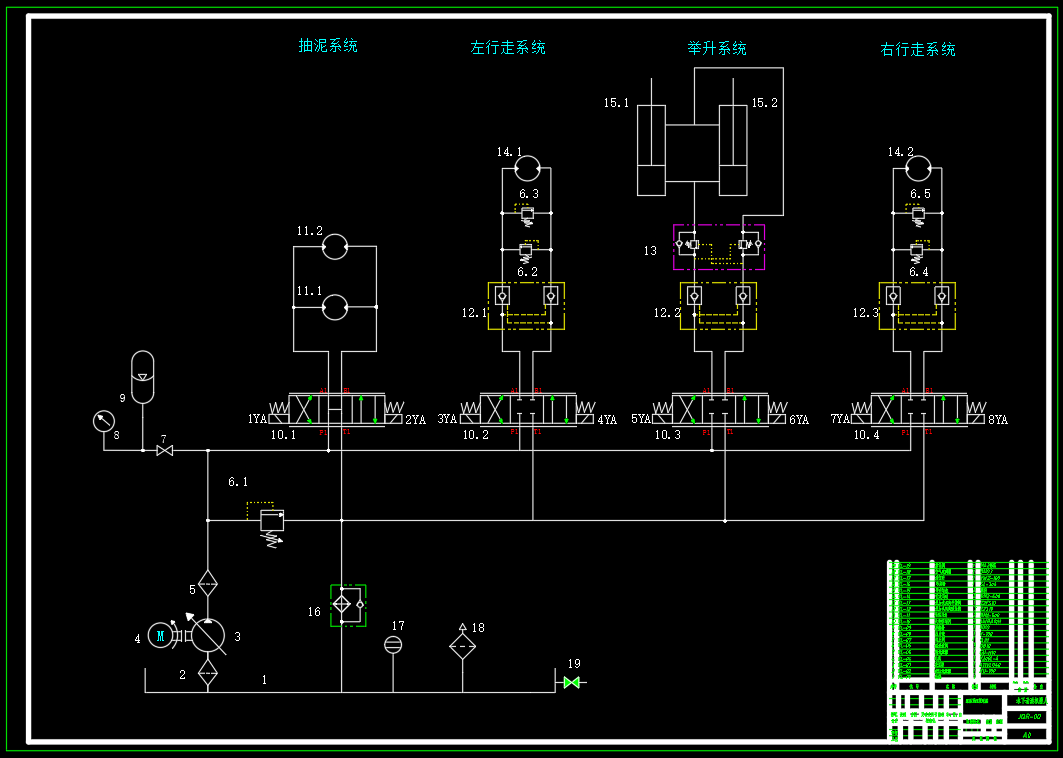
基于amesim水下清淤机器人的液压仿真
30
0

500
AutoCAD 2018
2024-09-06 02:38
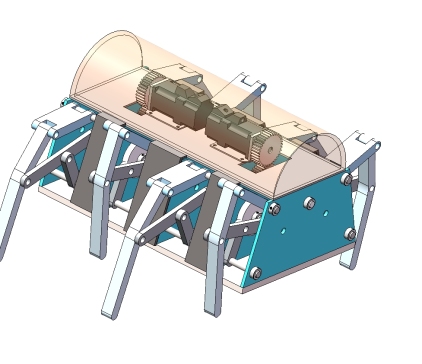
Z2665-八足机器人-图纸及爆炸运动仿真三维SW2019带参==1194304=200
52
0
80
SOLIDWORKS 2019
2024-11-02 09:56
0.png)
井下煤矿巡检机器人三维带仿真-360
20
0
1500
SOLIDWORKS 2023
2025-05-13 14:40
复合式机器人agv仓库行走搬运智能小车
82
0
80
STEP
2022-11-23 00:09
0.png)
美式大卡车仿真合金货车
5
0
60
STEP
2025-02-12 19:21
0.png)
JS317-立式加工中心Z轴进给传动设计与仿真
3
0
120
AutoCAD 2007
2024-04-08 21:29
0.png)
F0783-使用直线螺杆的机器人夹持机构
5
0
9
STEP
2024-10-08 13:51
0.png)
G02929-夹爪 使用线性螺杆的机器人夹具机构34
0
0
5
STEP
2024-11-22 10:34
座式喷砂机器人结构的设计及仿真
102
3
340
STEP
2024-01-19 13:44
0.jpg)
仿真
28
7
0
PROE
2020-10-12 06:10
0.jpg)
使它真实相机
10
1
0
SOLIDWORKS 2017
2021-03-06 06:03
0_0_364.png)
拔棉杆粉碎残膜回收联合作业机设计与仿真(SW+CAD+说明书)
10
0

120
SOLIDWORKS 2020
2024-09-30 16:21
0_0_364.png)
F0986-研发专用多足机器人
5
0
9
STEP
2024-10-08 21:03
仿生爬行壁虎总装运动仿真
48
5

44
STEP
2024-02-16 18:53
一台电机和程序可多人使用呼吸机
31
0

60
SOLIDWORKS 2020
2022-09-20 09:01
0_0_364.png)
步进电机驱动的多轮行进机器人
15
0
50
SOLIDWORKS 2016
2022-09-12 22:52
0_0_364.png)
步进电机驱动的多轮行进机器人
7
0
50
SOLIDWORKS 2016
2022-09-12 22:29
0_0_364.png)
齿轮连杆组合机构的多足机器人
83
0
100
STEP
2024-04-25 00:58
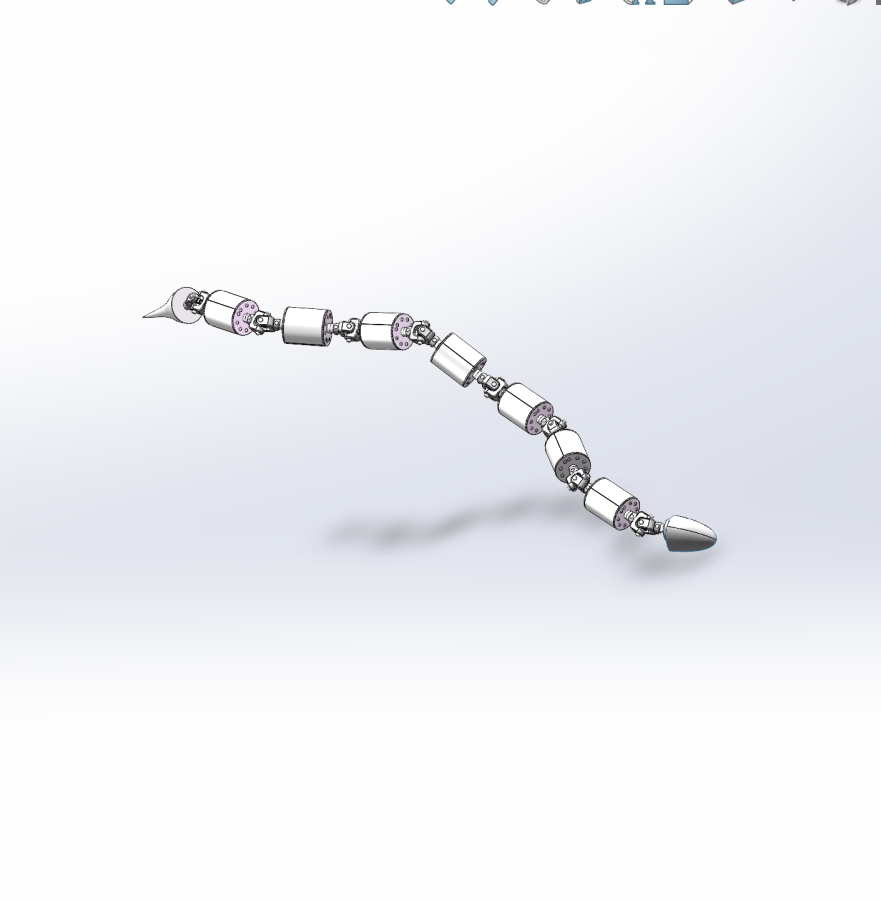
仿生蛇形机器人三维+说明书+仿真动画
39
0

65
SOLIDWORKS
2024-10-24 11:04
0.jpg)
仿人机器人脚
9
1
0
SOLIDWORKS 2018
2020-10-12 04:10
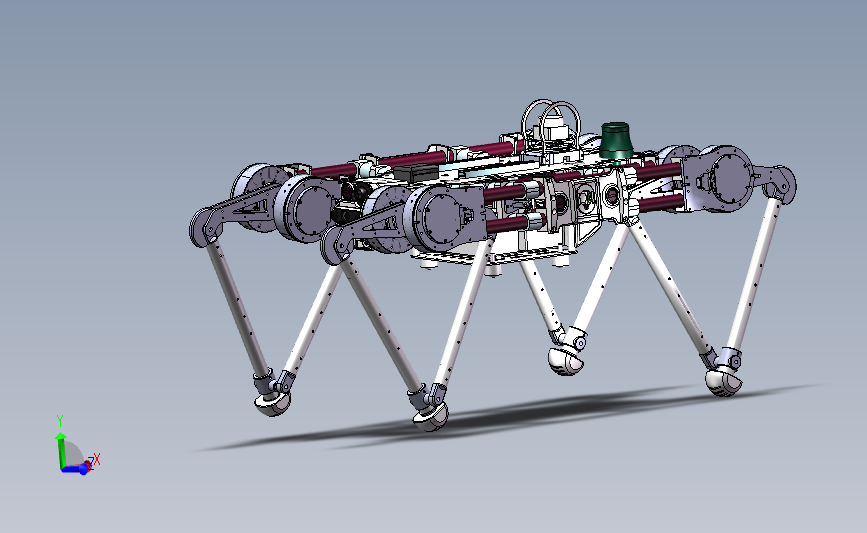
国产幽灵蛛2代机器人并联腿四足机器人
100
1
8
SOLIDWORKS 2020
2023-02-25 10:58
0.jpg)
钻头使用公式
6
4
0
2020-11-11 02:11
0_0_364.png)
链式刀库设计(卧加使用)--1701253-300
4
0
300
SOLIDWORKS 2020
2025-06-05 16:45
0.png)
G033738-使用紧凑型通用基板( Perf 板)ICB-288的电路=机器人机械臂
3
0
20
STEP
2025-06-08 09:34
0.jpg)
用于Mlb仿真的机械手
25
1
0
SOLIDWORKS 2017
2020-11-22 05:11
0.png)
使用四轴无人机输送燃油
9
0

88
SOLIDWORKS 2022
2024-08-04 18:51
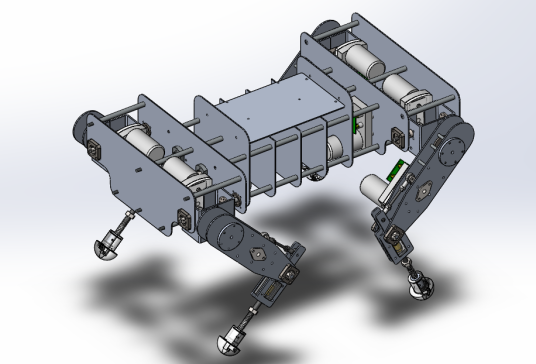
基于CPG算法和虚拟样机建模的仿生四足机器人
23
0

300
SOLIDWORKS 2014
2024-09-03 00:09

