
登录注册
0.png)
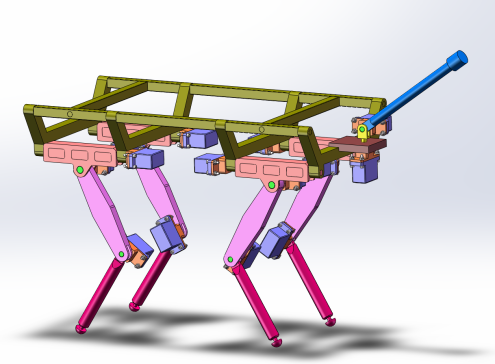
四足机器人-机械四足三维SW模型
151
0

200
SOLIDWORKS 2018
2024-02-16 10:23
0.png)
无人机推进器
36
0
10
SOLIDWORKS 2015
2023-05-02 18:21
0.png)
G19209-水推进器” 无人机
0
0

10
SOLIDWORKS 2018
2025-05-15 19:29
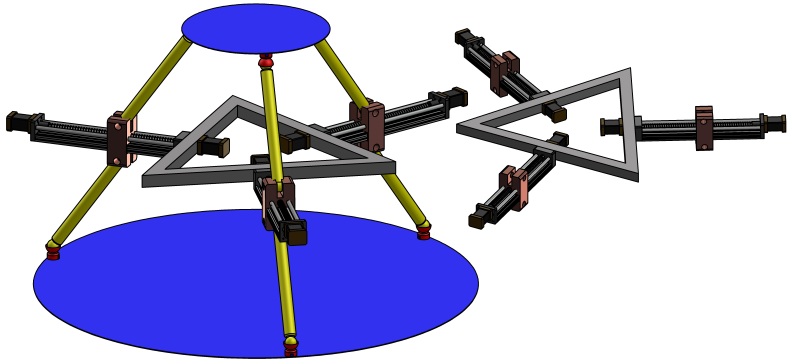
052-并联机器人-三角机器人 SW(1)
3
0

10
SOLIDWORKS 2021
2025-05-19 22:18

066-并联机器人-三角机器人 SW6
3
0
10
SOLIDWORKS 2016
2025-05-19 20:57

058-并联机器人-三角机器人 SW(7)
0
0
10
SOLIDWORKS 2016
2025-05-19 20:56
048-并联机器人-三角机器人 SW
9
0
10
SOLIDWORKS 2016
2025-05-19 22:10
0_0_364.png)
使用了单轴机器人的轻载传送装置
98
0

5
SOLIDWORKS 2012
2022-11-20 21:14
0.jpg)
使用了单轴机器人的轻载传送装置
24
0

0
SOLIDWORKS 2010
2020-10-11 10:10
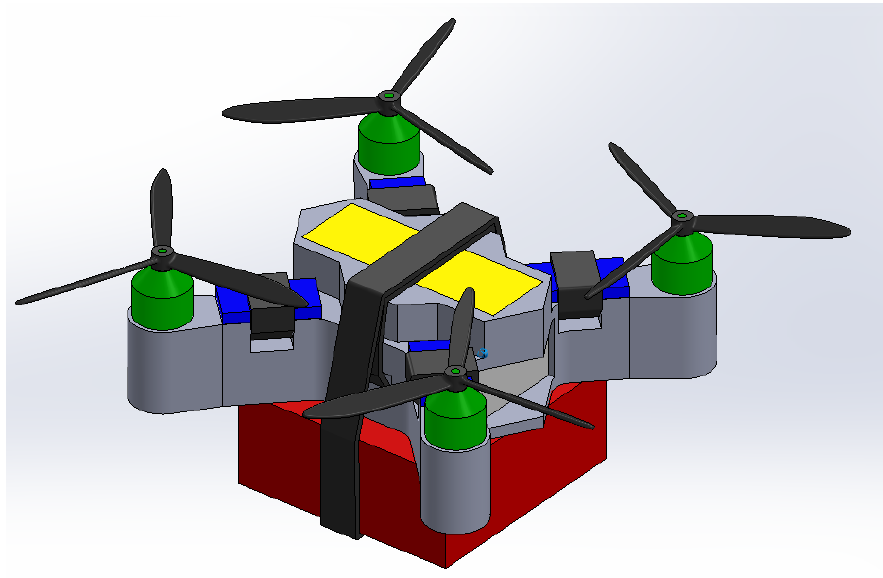
G023379-120mm 四轴飞行器框架 V03 使用拓扑优化生成=飞机
4
0
20
SOLIDWORKS 2015
2025-06-01 16:33
N009538-通用联合组件
4
0
20
SOLIDWORKS 2023
2025-05-27 09:56
0.png)
汽车差速器的仿真525519
48
0
250
SOLIDWORKS 5
2024-04-15 22:32
0.png)
使用偏心锥形凸轮的多段行程机构
12
1
0
SOLIDWORKS 2016
2025-05-28 16:57
0.png)
仿生鱼机器人
100
5
12
SOLIDWORKS 2018
2024-01-03 15:56
0.png)
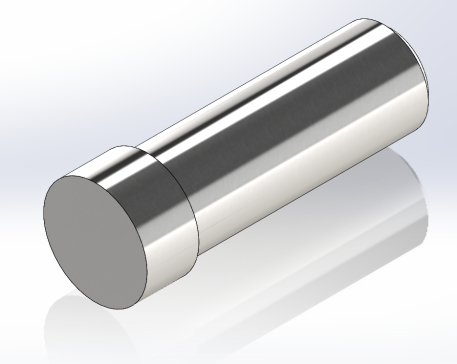
步进电机联轴器
4
0
25
SOLIDWORKS 2006
2024-09-10 21:42
0.png)
步进电机联轴器8毫米至6毫米35毫米1 4张1 2
0
0

20
SOLIDWORKS 2014
2025-05-29 15:02
0.png)
步进电机挠性联轴器6 35 x 8 mm 12
0
0
20
SOLIDWORKS 2014
2025-05-29 15:02
0.jpg)
N71--使用钢丝和气缸的4倍行程滑台
56
2

0
SOLIDWORKS 2010
2020-11-13 01:11
G049849-真空电机=叶轮推进器
1
0
20
SOLIDWORKS 2015
2025-06-16 11:25
0.png)
机器人仿人设计
6
0

10
SOLIDWORKS 2020
2024-08-30 08:20
4.png)
机器人-仿人设计
3
0
10
SOLIDWORKS 2020
2024-08-30 08:20
仿生四足机器人sw三维+CAD图纸==961384==500K
27
0
500
SOLIDWORKS 2020
2024-12-26 20:05

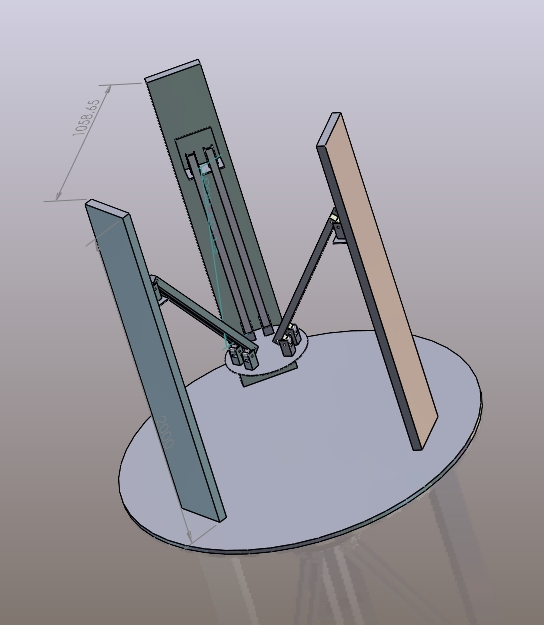
六轴并联机器人平台
9
0

15
SOLIDWORKS
2025-04-16 08:22
0_0_364.png)
HEGOA六足机器人__紧凑型动态六足机器人
4
0
750
SOLIDWORKS 2015
2024-10-22 10:20
行走机器人
41
0

250
SOLIDWORKS 2016
2024-02-04 01:00
二联式组合件
7
0

25
SOLIDWORKS
2025-05-16 16:09
0_0_364.png)
多旋翼飞行机器人及其并联机械手设计
19
1

90
SOLIDWORKS 2013
2024-08-30 21:55
0.png)
CNC机中使用的张紧器专门在CO2激光器中
28
0
1000
SOLIDWORKS 2023
2025-03-02 21:30
0.png)
四足机器人菠萝狗
98
5
7
SOLIDWORKS 2018
2023-09-07 00:22
六足类机器人单臂
17
1

13
SOLIDWORKS 2018
2023-03-29 22:33
0.png)
第16组 四足机器人
27
0

60
SOLIDWORKS 2014
2023-03-16 09:52
0.png)
第15组 足球机器人
16
0
60
SOLIDWORKS 2015
2023-03-16 09:52
0.png)
第5组 足球机器人
25
0
60
SOLIDWORKS 2016
2023-03-16 09:46
0.jpg)
双足机器人(monkyebot或“changuibot”)
11
0
0
SOLIDWORKS 2016
2020-10-22 12:10
仿生四足机械狗
12
0

200
SOLIDWORKS 2016
2024-12-06 19:58
0.png)
凸轮机构 格式:SW2020原格式(带运动仿真) STEP
4
1

6
SOLIDWORKS 2020
2024-10-14 06:25
0.png)
凸轮机构 格式:SW原格式(带运动仿真) STP X_T
6
0
6
SOLIDWORKS 2020
2024-10-14 06:25
0.png)
机械使用的排针连接器 UG12
2
0
1
SOLIDWORKS 2016
2025-05-19 23:27
0_0_364.png)
G034112-通过机器人进行自动矿物分析=机器人机械臂
0
0
20
SOLIDWORKS 2023
2025-06-08 12:37
0.png)
3爪机械爪 运动仿真
7
1

30
SOLIDWORKS 2022
2024-08-12 20:40

