
登录注册
0.png)
四足机器人狗0
36
1

20
STEP
2022-06-06 12:22
0_0_364.png)
四足机器人20
21
0
20
STEP
2022-06-06 12:16
0.png)
四足机器人10
13
0
20
STEP
2022-06-06 12:14

六足机器人10
11
0
20
SOLIDWORKS 2015
2022-06-06 11:40
0.jpg)
四足机器人腿
63
2

1
STEP
2021-11-16 01:11
0.jpg)
六足机器人_1
29
1

0
AutoCAD
2020-11-18 12:11
0.png)
DIY四足机器人
16
1
7
STEP
2022-10-26 10:25
0.png)
玩具六足仿生兽带运动仿真三维PROE==535200==35
238
0
35
PROE
2023-12-06 11:12
0.png)
基于Adams的汽车主减速器的设计与仿真【含CAD图纸】
4
0
150
AutoCAD 2004
2024-10-17 01:15
0.png)
适合常规和钢笔使用的笔筒--SW
6
1

60
SOLIDWORKS 2023
2024-12-21 05:51
0.png)
混合式步进电机HSTM57-1.8-S-56
6
0

10
SOLIDWORKS 2020
2024-12-17 20:44
0.jpg)
机器人部件正在进行中
15
0
0
SOLIDWORKS 2013
2020-10-12 05:10
0.png)
带式掺和器(混合器)
39
0

100
SOLIDWORKS 2020
2023-09-24 22:13
0.jpg)
使用触点和LED重置
7
1
0
SOLIDWORKS 2017
2020-11-18 11:11
Solidworks 便携式足部仿人手按摩仪
31
0
83
SOLIDWORKS 2020
2024-08-16 15:04
0.png)
G035110-中型联盟机器人足球+2023+波尔曼万隆=机器人机械臂
3
0

10
STEP
2025-06-15 10:12
0.png)
M4482-绕线器(与探测机器人配套使用)三维SW2016带参
10
0
49
STEP
2024-09-16 11:26
0.png)
适合儿童使用的木椅
5
0
60
SOLIDWORKS 2021
2025-01-29 23:29
四足爬行机器人简易结构
48
0

48
SOLIDWORKS
2024-11-30 14:23
0.png)
四足爬行机器人sw18可编辑
8
0
0
SOLIDWORKS 2018
2025-06-12 18:12
0.png)
四足轮式机器人--1443699-200
14
0

190
SOLIDWORKS 2019
2025-04-17 10:05
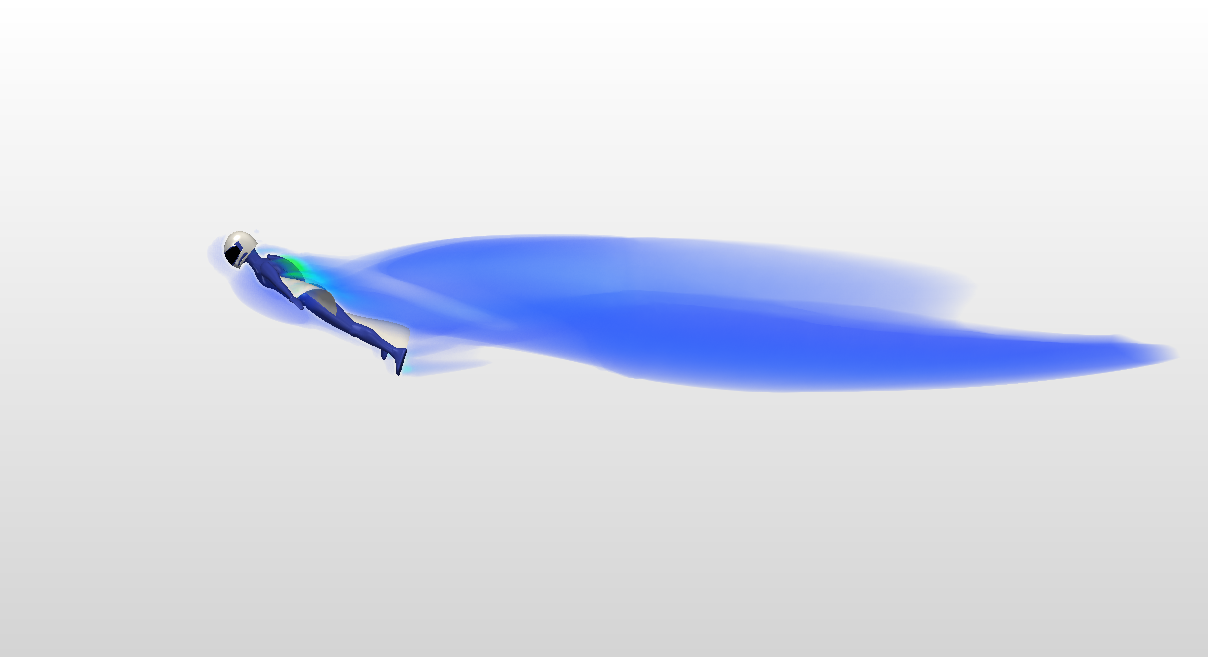
翼装飞行员仿真分析
22
0

15
STEP
2023-09-12 17:06
0.png)
SJ602-A 机械臂使用手册
4
0
60
STEP
2024-04-04 10:40
行星齿轮减速器运动仿真
89
5

8
UG NX
2024-03-04 02:16
行星齿轮减速器运动仿真
12
1

7
STEP
2025-02-03 22:56
0.png)
G030437-倒立摆的控制使用扭曲陀螺轮=机器人机械臂
0
0
10
STEP
2025-06-09 22:41
0.png)
G030437-倒立摆的控制使用扭曲陀螺轮=机器人机械臂
3
0

20
Inventor 2017
2025-06-05 10:29
0.png)
皂液器使用单向阀
12
0
12
SOLIDWORKS 2023
2025-04-17 21:43
0.png)
机器人足球底盘包括3个零件pololu14x14机器人足球-STEPIGES-
5
0
60
STEP
2024-12-21 02:47
032-并联机器人-六足动物 SW STEP
3
0

10
SOLIDWORKS 2012
2025-05-19 21:38
0.jpg)
实际问题解决-使用Soldiwork进行支架模拟
9
1
0
SOLIDWORKS 2016
2020-12-07 12:12
0_0_364.png)
仿制进口瑞士超越离合器--582485-300
37
0
275
SOLIDWORKS 2014
2025-02-23 08:35
0.png)
仿生六足机器人机构的设计多足多功能机器人的结构设计
35
0
220
AutoCAD 2000
2024-03-03 23:18
0.png)
仿生六足机器人机构的设计【多足多功能机器人的结构设计】
24
0
225
AutoCAD 2000
2024-04-24 15:00
0.png)
仿人机器人 格式:STEP SW Creo
6
1
8
SOLIDWORKS 2020
2024-08-30 08:00
0.png)
UG运动仿真含源文件和视频资料-超越离合器
25
0

30
UG
2024-02-28 16:17
0.png)
G029483-SCUTTLE+ESP8266+用于物联网的支架=机器人机械臂
4
0
10
STEP
2025-06-10 00:06
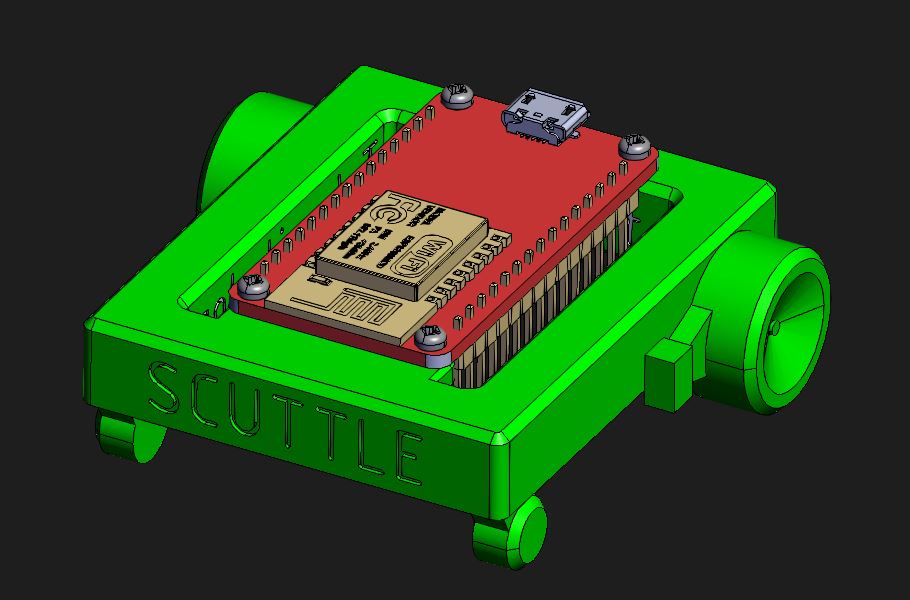
G029483-SCUTTLE ESP8266 用于物联网的支架=机器人机械臂
1
0
20
SOLIDWORKS 2020
2025-06-05 02:13
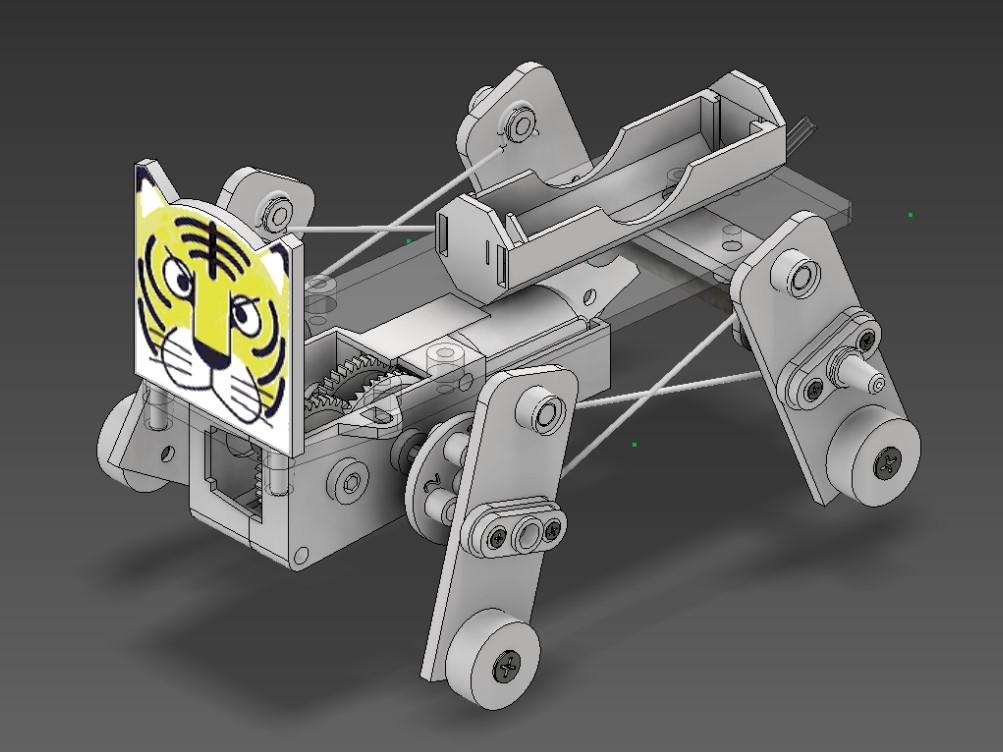
四足机器人机械虎行走玩具
17
0

35
Parasolid
2024-12-13 10:25
0.png)
Z0442-起垄铺膜联合作业机器人模型三维SW2016带参
4
0
90
SOLIDWORKS 2013
2024-07-30 19:58

