
![17HS系列混合式步进电机[17HS5012]](https://html.lazystones.com/lazy/564457/image/5a345212-536e-4c4e-aa18-958be55424ae原图(主)0.png)
17HS系列混合式步进电机[17HS5012]

![17HS系列混合式步进电机[17HS3006]](https://html.lazystones.com/lazy/564455/image/f4c0235d-0833-4967-9686-e95930efbe5b原图(主)0.png)
17HS系列混合式步进电机[17HS3006]
![17HS系列混合式步进电机[17HS3001]](https://html.lazystones.com/lazy/564454/image/c037953a-3f1b-478d-bdb3-ef4aa1865cb4原图(主)0.png)
17HS系列混合式步进电机[17HS3001]
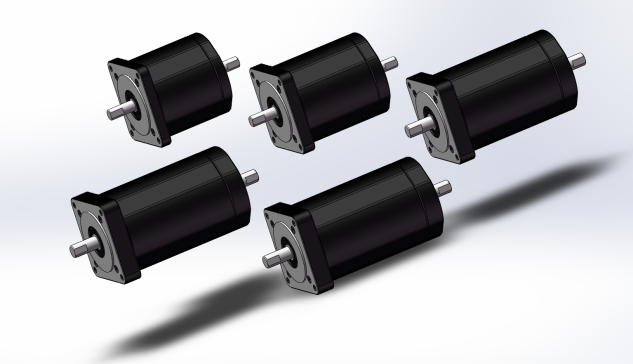
![两相42系列混合式步进电机[42BYG250AK-SASSML-0151]](https://html.lazystones.com/lazy/1754702/image/9bf25e31-6a0c-49c8-9127-c07788c3199a原图(主)0.png)
两相42系列混合式步进电机[42BYG250AK-SASSML-0151]
![两相42系列混合式步进电机[42BYG250BK-SASSML-0151]](https://html.lazystones.com/lazy/1755146/image/7e225d66-0704-4294-9353-c355343413e0原图(主)0.png)
两相42系列混合式步进电机[42BYG250BK-SASSML-0151]
5款90BYG二相、三相混合式步进电机

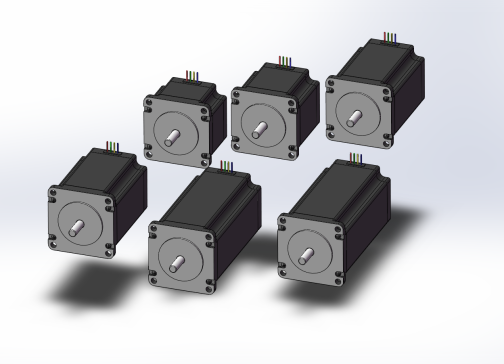
6款57BYG二相、三相混合式步进电机
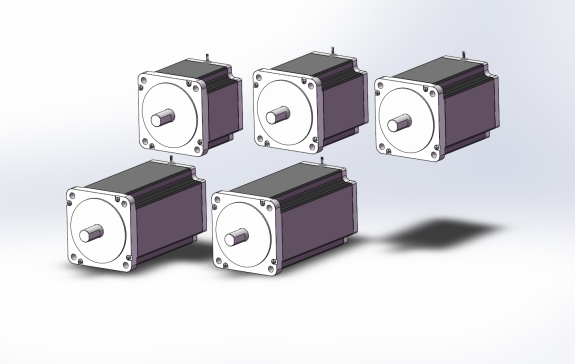
5款86BYG二相、三相混合式步进电机
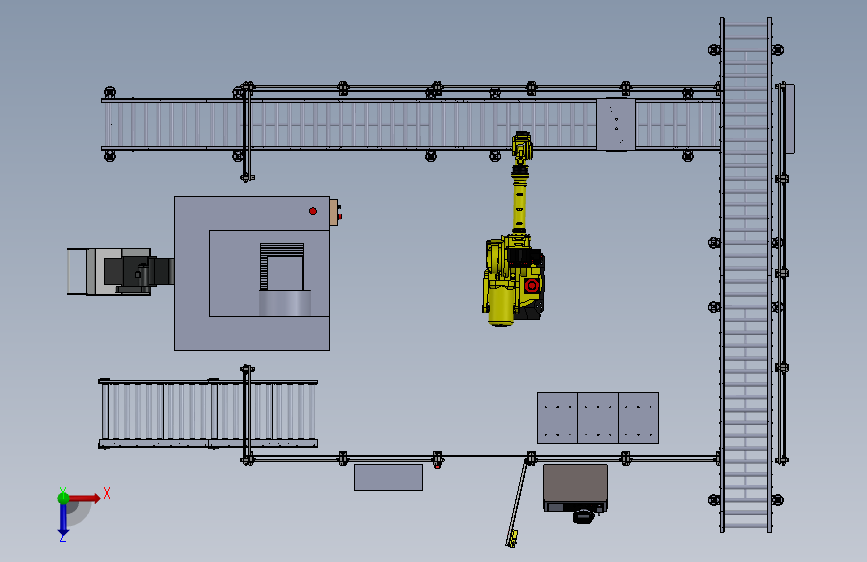
雨刷器装配与仿真

0_0_364.png)
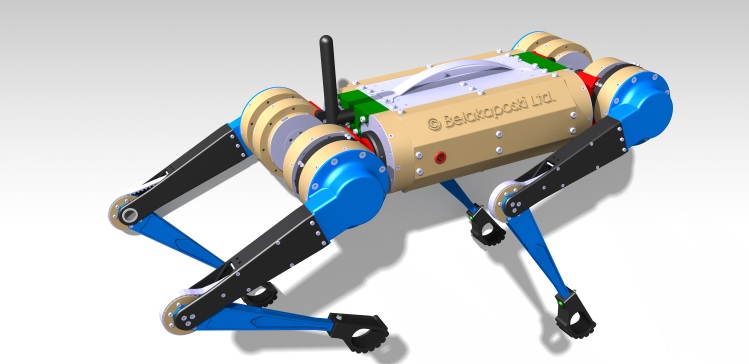
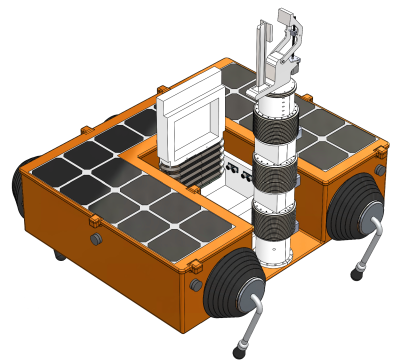
舵机四足机器人MF

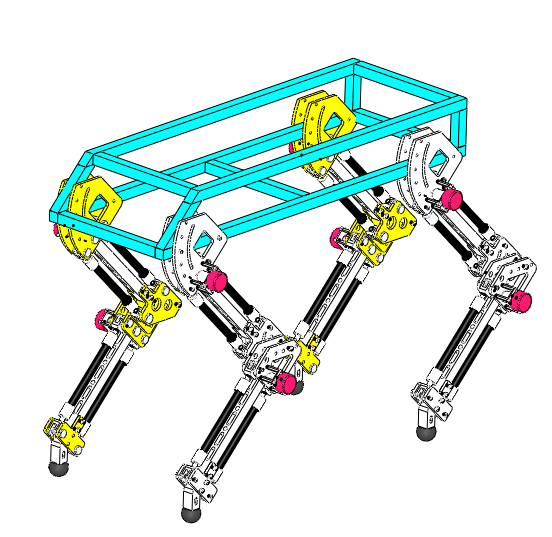
四足机器人机械狗

0.png)
四足机械狗机器人
四足机械狗机器人

0.png)
G030133-步行机器人 (8)=机器人机械臂

0_0_364.png)
G030135-步行机器人 (10)=机器人机械臂

G030136-步行机器人 (11)=机器人机械臂
0_0_364.png)
G030130-步行机器人 (5)=机器人机械臂
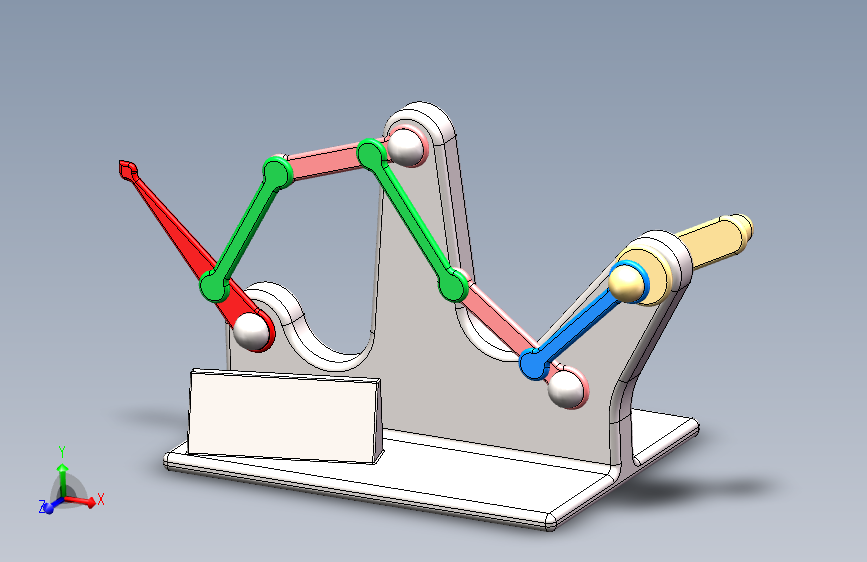
连杆机构仿真

0.png)
五自由度并联机器人 格式:STP X_T SW

0_0_364.png)
三自由度并联机器人 格式:STEP X_T SW
0.png)
仿蜘蛛侦查型机器人

机器人和CNC

0.png)
G19466-无人机推进器” 无人机
是一种飞行机器,由飞行员遥控或由操作员自控操作,利用空气动力学定律提升自身,可重复使用,能够携带武器和其他有效载荷。这种无人机的最大用途是在军事领域,但它也用于自由和公开进行的地理、摄影和摄像领域
O-Crab六足行走机器人3D数模图纸 Solidworks设计
0.png)
G025813-推进器=水下无人机
0.png)
G026023-BTD 150推进器=水下无人机
0.png)
G034606-行星齿轮变速箱步进。=机器人机械臂
0.png)
G030139-步行机器人:鸭形机器人=机器人机械臂
0.png)
仿生蜻蜓仿生扑翼鸟(含动画仿真)sw2021

0.png)
混联式分拣机器人3

履带式爬行机器人
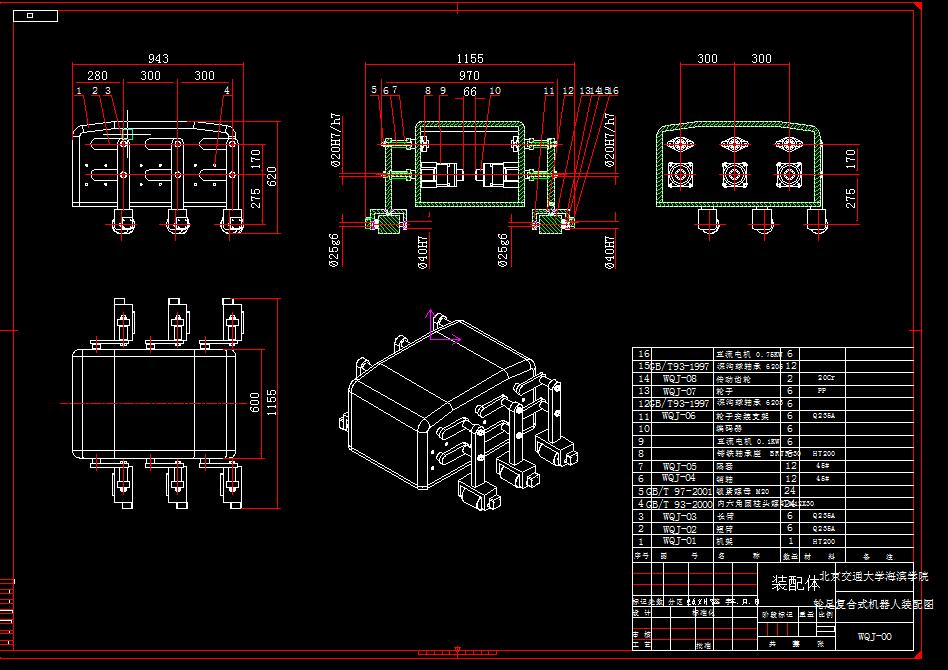
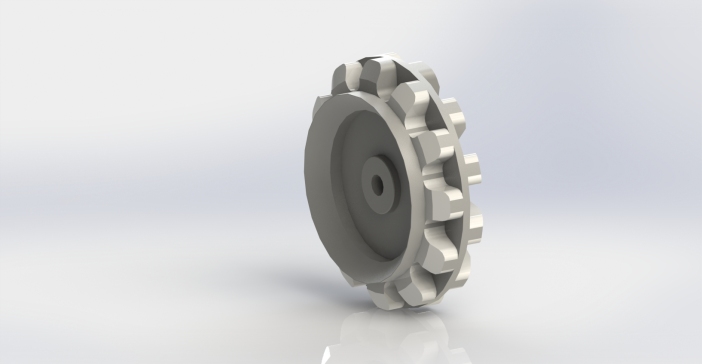
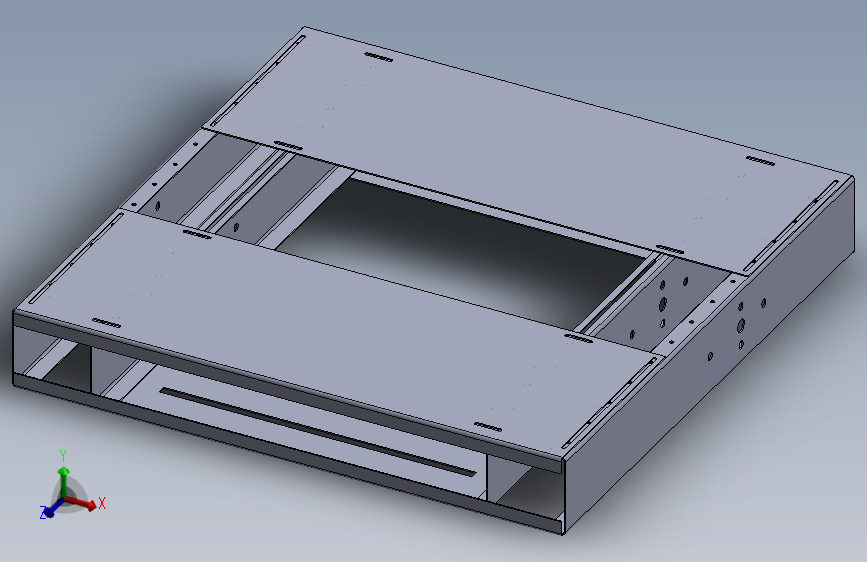
Q468-轮足复合式机器人的设计与研究【三维SolidWorks】
0.jpg)
使用风扇和USB读取LED灯
G029216-Pololu 改进型链轮,12 齿=机器人机械臂

桌上足球和台球桌组合
G029424-Roombot 进展中 - UBC Enph 253=机器人机械臂
0_0_364.png)
仿生机械鱼机器人
0.png)
扫地机器人的设计(家用地面清洁机器人)资料 Solidworks和CAD格式
0.png)
扫地机器人的设计(家用地面清洁机器人)资料 Solidworks和CAD格式

