
登录注册
0.jpg)
旋风设计和仿真
11
4

0
SOLIDWORKS 2016
2020-11-05 07:11
1.png)
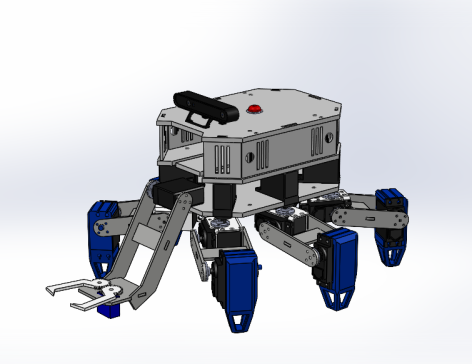
六足
74
3

5
SOLIDWORKS 2021
2022-08-26 22:42
0_0_364.png)
sw仿生蜘蛛可编辑含参数含配合可用作仿真
12
0
100
SOLIDWORKS 2023
2024-11-08 10:26
0.png)
工业机器人仿真实训室模型
47
0

295
SOLIDWORKS 2016
2024-03-04 01:55
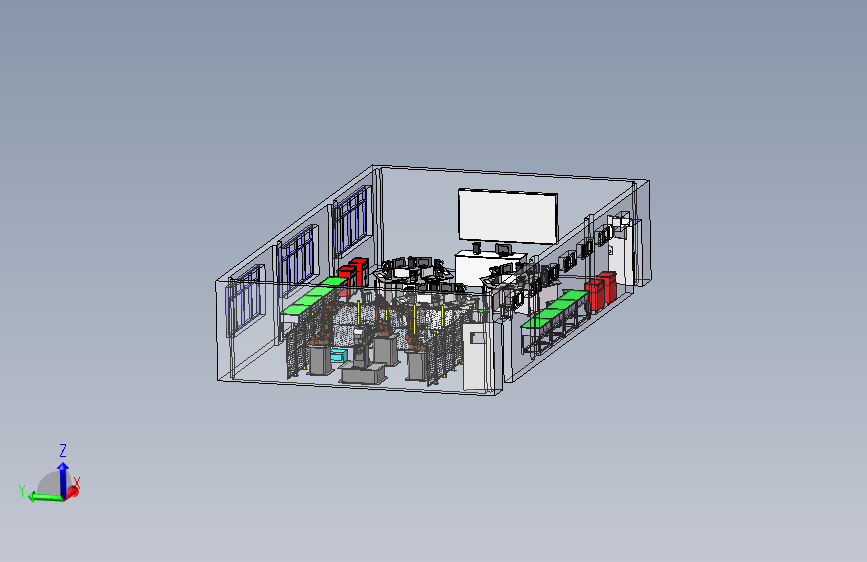
工业机器人仿真实训室模型MF
14
0

225
SOLIDWORKS 2016
2025-05-10 21:08
0.png)
双足联动机器人设计模型
57
0

27
SOLIDWORKS 2017
2024-02-16 19:38
0.png)
四足行走机器人sw模型
58
0
141
SOLIDWORKS 2011
2024-02-16 17:25
0.png)
四足行走机器人sw模型
18
0
140
SOLIDWORKS
2024-02-09 21:35
0_0_364.png)
F0859-四足爬行机器人sw MF
45
5

10
SOLIDWORKS 2017
2023-11-22 21:16
0.png)
heo·Jansen型两足步行机器人
26
0
12
SOLIDWORKS 2015
2023-11-13 14:25

轮足复合式机器人的设计与研究(全部结清)
28
0

200
SOLIDWORKS 2012
2024-03-13 02:21
0.png)
使用Solidworks进行面建模的手机保护套
14
0

60
SOLIDWORKS 2023
2025-01-29 23:28
0.jpg)
在我的真空室上使用的中心夹具和钩板
25
2
0
SOLIDWORKS 2015
2021-03-12 10:03
履足复合式震后救灾机器人
41
0
90
SOLIDWORKS 2021
2024-10-17 08:07
0.png)
电动机后可使用的螺栓联轴器组件--SW
0
0
60
SOLIDWORKS 2023
2024-12-21 01:29
0.png)
仿真人手设计模型
5
0
7
SOLIDWORKS 2023
2025-01-01 22:41
0.jpg)
干式变压器仿真
101
31
0
SOLIDWORKS 2015
2020-10-30 04:10
0.png)
仿生昆虫飞行机器人
85
1
8
SOLIDWORKS 2020
2023-02-19 20:47
0.png)
并联机器人 Delta 6 graos de Libertad 格式:SW原格式 STEP X_T
2
0
8
SOLIDWORKS 2019
2024-10-05 09:06
0.png)
使用钢丝和气缸的倍行程滑台
27
0

20
SOLIDWORKS 2010
2023-04-05 23:20
0.png)
F0986-研发专用多足机器人
19
0
10
SOLIDWORKS 2010
2023-11-22 21:21
0.png)
六足蜘蛛爬行机器人
27
1

6
SOLIDWORKS 2022
2024-07-28 17:29
0.png)
智能行走四足机器人
10
0
88
SOLIDWORKS 2020
2024-08-30 19:05
六足爬行机器人结构
6
0
45
SOLIDWORKS
2024-05-24 18:42
多足爬行机器人结构
8
0

48
SOLIDWORKS 2019
2024-09-11 08:32
多足爬行机器人结构
32
8
28
SOLIDWORKS 2024
2024-09-13 11:26

六足爬行机器人图纸
29
0
90
SOLIDWORKS 2013
2024-05-24 11:06
0_0_364.png)
四足探索行走机器人
30
0

20
SOLIDWORKS 2014
2024-02-27 13:41
0_0_364.png)
六足蜘蛛爬行机器人
1
0
1
SOLIDWORKS 2024
2025-06-20 23:15
0.png)
NASA的挑战使用的HET模型可用于人类评级进入载具-SW-STEPIGES
2
0
60
SOLIDWORKS 2023
2024-12-21 00:30
六轴机器人渲染仿真动画
33
0
500
SOLIDWORKS 2016
2024-03-08 23:01
0.png)
草莓采摘机器人仿真视频
10
0
8
SOLIDWORKS 2022
2024-07-20 16:54
0.png)
采摘机器人(新1修改运动仿真)
11
0

500
SOLIDWORKS 2022
2025-05-11 12:50
0.jpg)
行星联合会
9
1
0
SOLIDWORKS 2012
2020-11-05 03:11
0_0_364.png)
仿生足
111
0
12
SOLIDWORKS 2020
2023-07-24 18:52
0.png)
并联机器人 格式:STP X_T SW F3z
1
0
8
SOLIDWORKS 2020
2024-10-05 09:06
0.png)
IRB 920T__四轴机器人,载荷6公斤,适用于灵活使用
0
0
750
SOLIDWORKS 2015
2024-10-22 15:44
仿生猎豹四足机器人机械手
45
0

250
SOLIDWORKS 2018
2024-09-11 17:17
0.png)
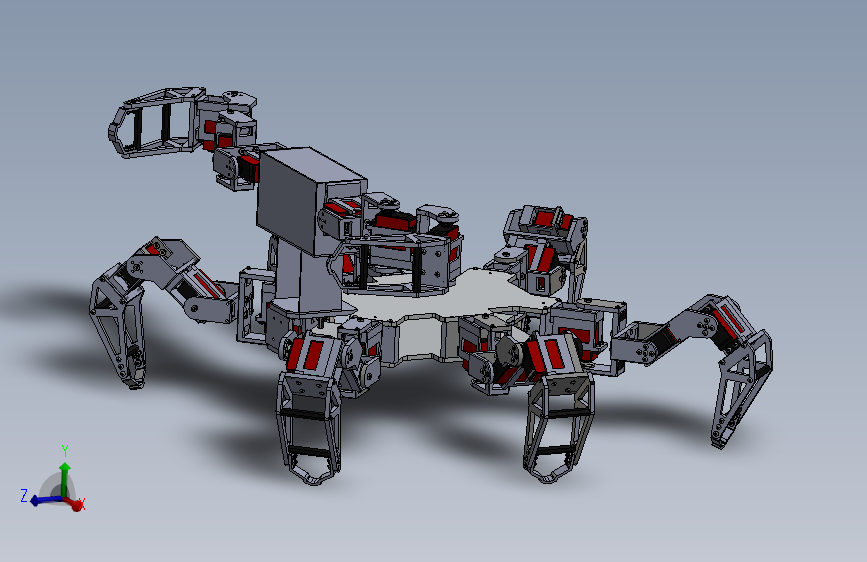
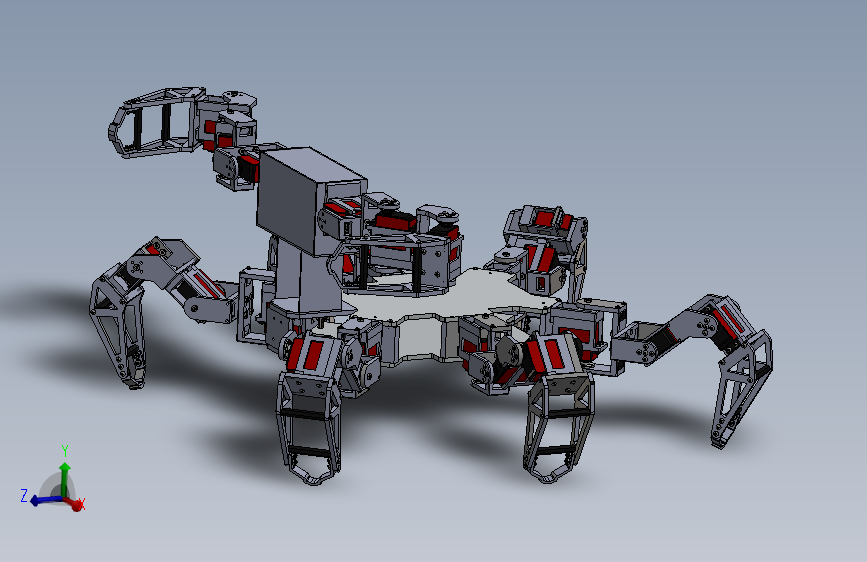
六足蜘蛛机器人
202
1

90
SOLIDWORKS 2016
2022-10-23 11:39
0.png)
四足仿生机器马
8
0
70
SOLIDWORKS 2023
2025-01-01 22:44

