
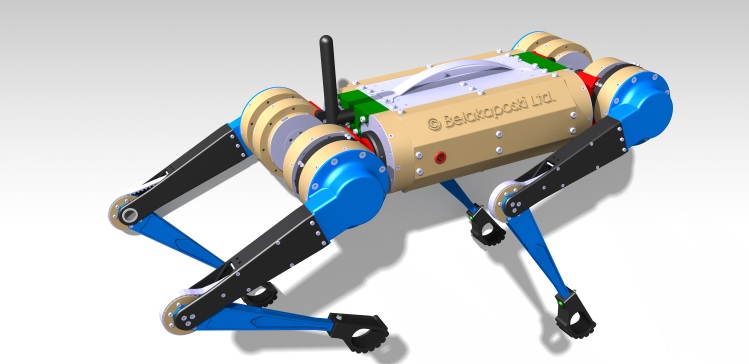
四足机械狗机器人

0.png)
G030135-步行机器人+(10)=机器人机械臂

0.png)
G030131-步行机器人+(6)=机器人机械臂
0.png)
G030133-步行机器人+(8)=机器人机械臂
0.png)
G030126-步行机器人+(1)=机器人机械臂
0.png)
G030127-步行机器人+(2)=机器人机械臂
0.png)
G030138-步行机器人=机器人机械臂
0.png)
G030132-步行机器人+(7)=机器人机械臂
0.png)
G030129-步行机器人+(4)=机器人机械臂
0.png)
G030128-步行机器人+(3)=机器人机械臂
0.png)
G030133-步行机器人 (8)=机器人机械臂

G030129-步行机器人 (4)=机器人机械臂
0.png)
G030132-步行机器人 (7)=机器人机械臂
0_0_364.png)
G030135-步行机器人 (10)=机器人机械臂
0.png)
G030127-步行机器人 (2)=机器人机械臂

G030136-步行机器人 (11)=机器人机械臂
0_0_364.png)
G030130-步行机器人 (5)=机器人机械臂
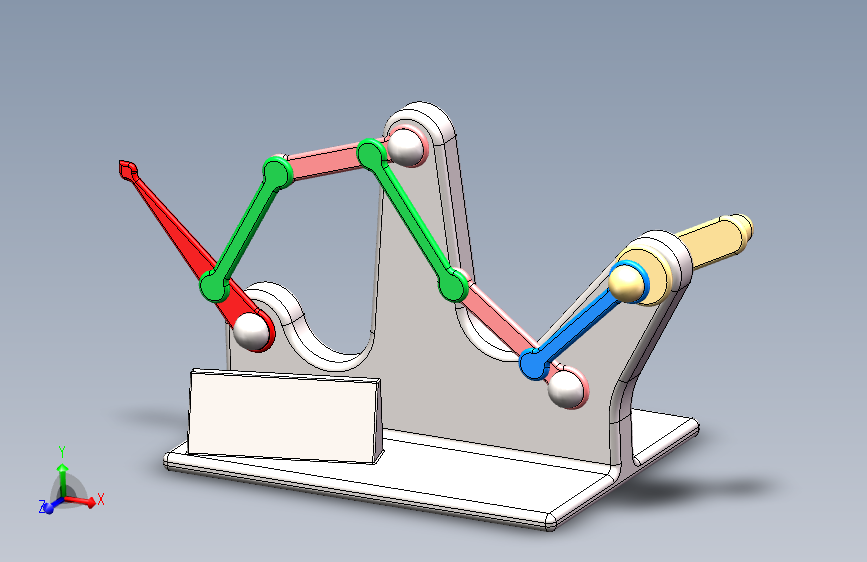
连杆机构仿真

0_0_364.png)
仿真型机械手
0.png)
多足行走机器人+探索再谈机器马的难题+创新...

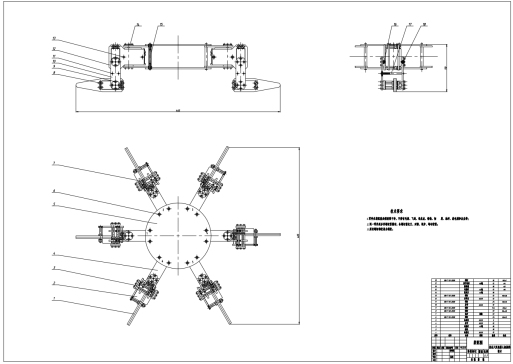
19- 六自由度六足并联机器人 inventor设计 STEP IGS格式
0.png)
五自由度并联机器人 格式:STP X_T SW

0_0_364.png)
三自由度并联机器人 格式:STEP X_T SW
0.png)
G030137-步行机器人,平行曲柄=机器人机械臂
0.png)
仿蜘蛛侦查型机器人

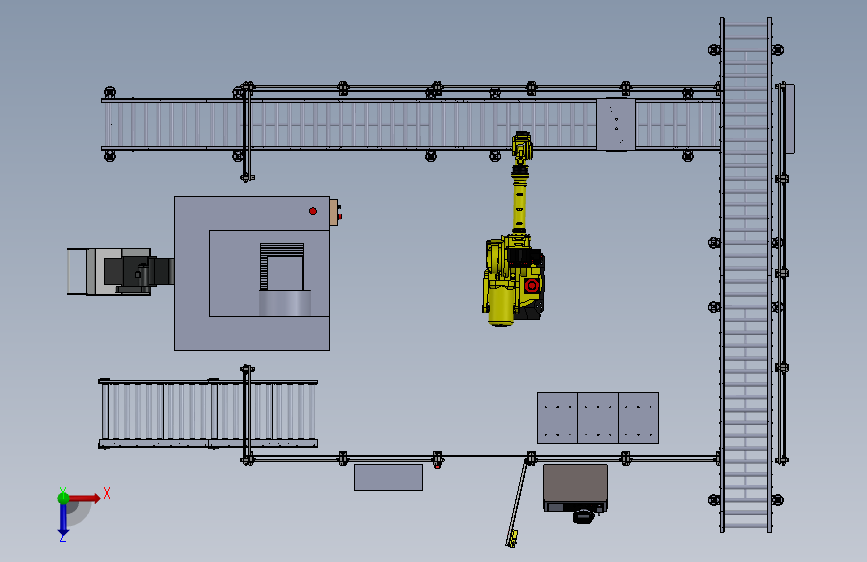
机器人和CNC
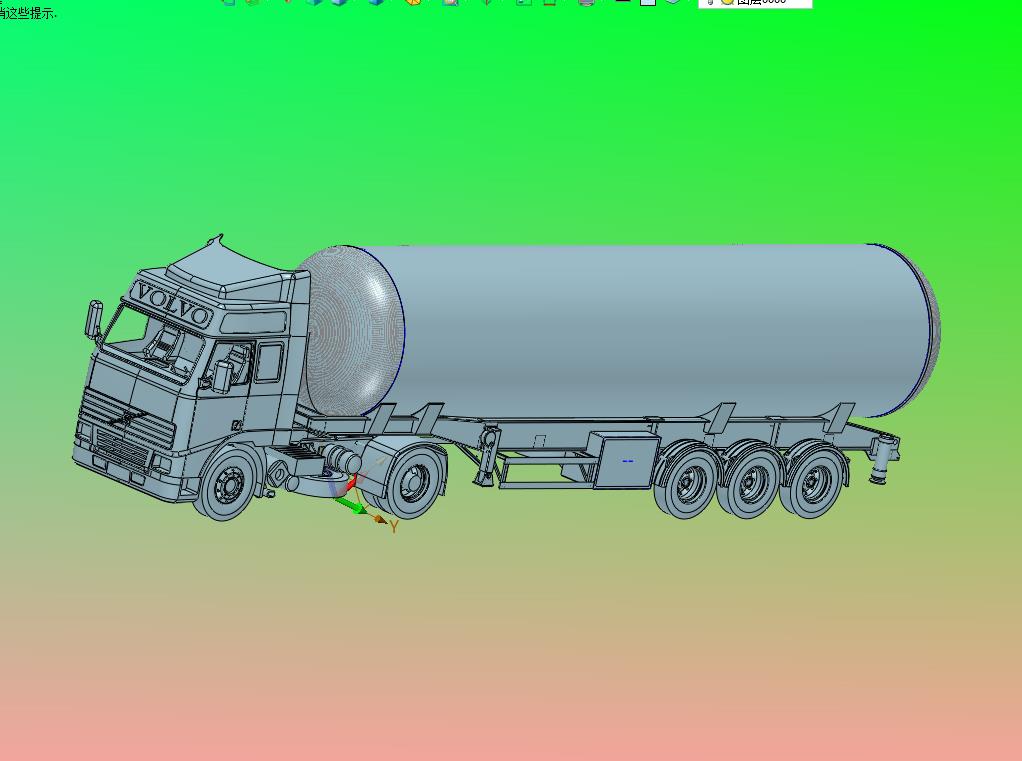
仿真合金油罐车模型摆件

0.png)
G027301-2足人形机器人=机器人机械臂
0.png)
G19466-无人机推进器”+无人机
0.png)
G19466-无人机推进器” 无人机
是一种飞行机器,由飞行员遥控或由操作员自控操作,利用空气动力学定律提升自身,可重复使用,能够携带武器和其他有效载荷。这种无人机的最大用途是在军事领域,但它也用于自由和公开进行的地理、摄影和摄像领域

0.png)
G030938-海爬行者=机器人机械臂
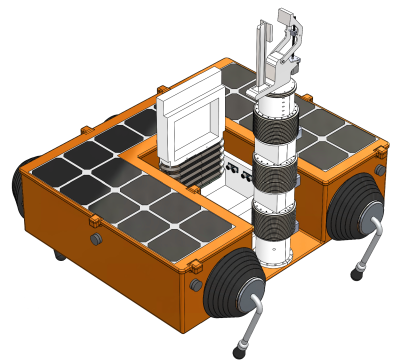
O-Crab六足行走机器人3D数模图纸 Solidworks设计
E0758-仿生六足机器人机构的设计【多足多功能机器人的结构设计】CAD+说明书
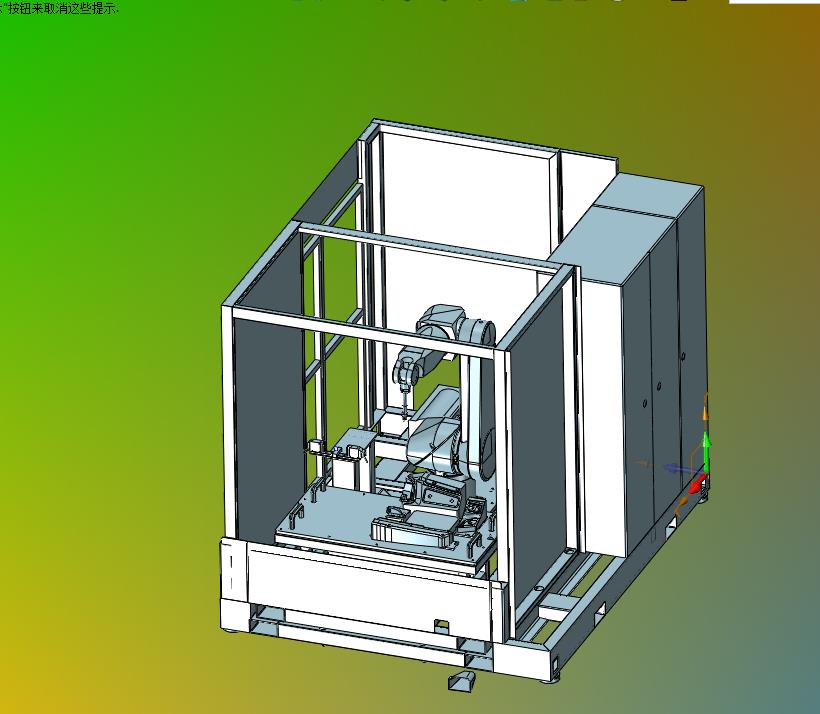
机器人拿取刀具进行切割塑料毛刺
0.png)
G17566-F1推进器界面” 无人机
0.png)
G17566-F1推进器界面”+无人机
0.png)
G025814-推进器+(1)=水下无人机
G026023-BTD+150推进器=水下无人机
0.png)
G025813-推进器=水下无人机

