
登录注册
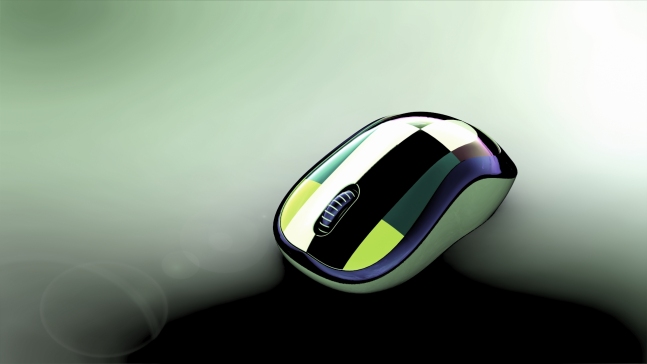
使用solidworks 11对罗技鼠标进行表面建模
0
0

10
SOLIDWORKS 2018
2025-01-15 16:20
0.png)
仿真飞鸟遥控扑翼鸟飞行器
0
0

40
STEP
2025-06-21 02:23
0.png)
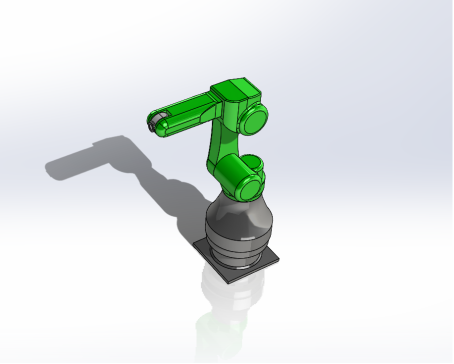
G00105-Fanuc+机器人如何使用其平台
12
0

10
STEP
2024-10-14 17:33
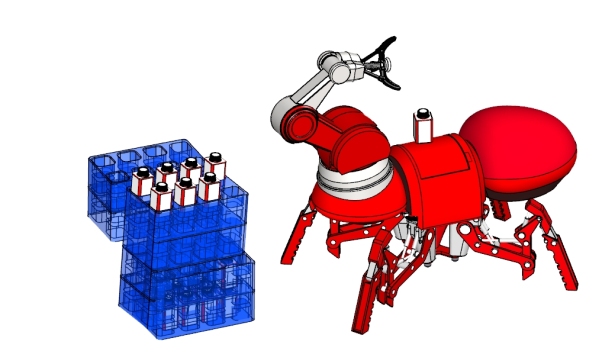
码垛机器人(参考使用)
16
1

3
SOLIDWORKS 2021
2025-03-22 13:35
michelle四足仿生转运机器人
22
0

80
Inventor 2015
2024-05-11 17:13
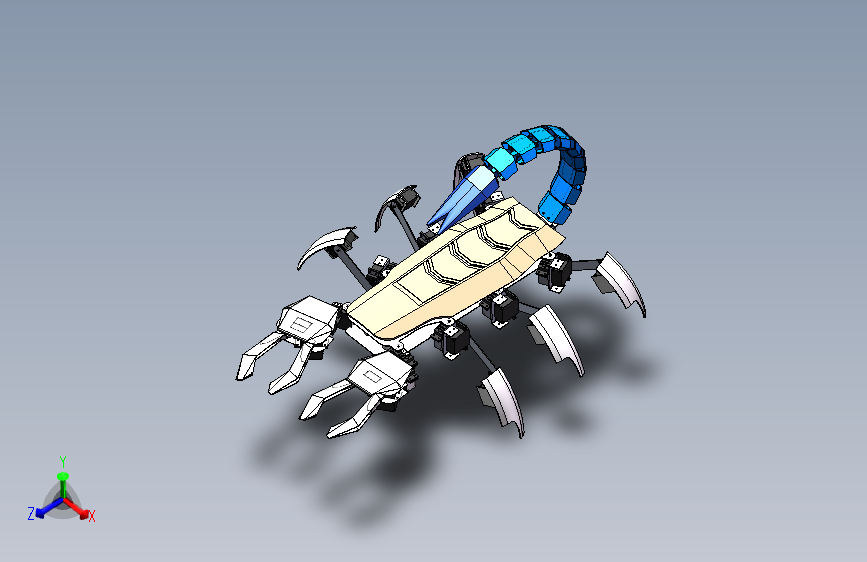
仿生蝎子六足机器人MF
5
0

35
SOLIDWORKS 2014
2025-05-18 22:03
0.png)
F0859-四足爬行机器人
13
1
9
STEP
2024-10-08 13:56
四足爬行机器人CAD
24
0

600
AutoCAD 2000
2024-11-10 11:23
0.png)
Cassie_双足步行机器人
41
0

220
SOLIDWORKS 2023
2025-01-01 22:39
0.png)
四足爬行机器人 sw22
28
1
518
SOLIDWORKS 2024
2025-01-09 17:10
0_0_364.png)
多足行走机器人sw
16
0
8
Parasolid
2025-01-24 16:33
多关节全身拟人仿真机器人
107
2
90
STEP
2023-01-30 23:12

骑行自行车仿真
13
0

50
SOLIDWORKS 2016
2024-06-24 14:23
0.png)
W3145-四足机器人仿生机器狗cero2.0
6
0
4
STEP
2024-09-15 14:57
0.png)
可以使用自动调节封口机进行概括-SW-
3
0

60
SOLIDWORKS 2021
2024-12-21 04:53
0_0_364.png)
G033726-使用Arduino Uno的线跟踪机器人=机器人机械臂
0
0
20
SOLIDWORKS 2018
2025-06-08 09:34
0.png)
G033726-使用Arduino+Uno的线跟踪机器人=机器人机械臂
2
0

10
STEP
2025-06-13 22:28
0_0_364.png)
G033727-使用Arduino+Uno和Raspberry+Pi+Zero的线跟踪机器人=机器人机械臂
2
0
10
STEP
2025-06-13 22:28
0.png)
G027278-2 个联合腿=机器人机械臂
0
0
20
SOLIDWORKS 2023
2025-06-03 14:28
0.png)
G027278-2+个联合腿=机器人机械臂
0
0
10
STEP
2025-06-07 18:55
0.png)
G20170-SL_ST STEADY FPV正在进行中” 无人机
6
0
10
IGES
2025-05-16 22:14
0.png)
G20170-SL_ST+STEADY+FPV正在进行中”+无人机
6
0
5
STEP
2025-05-18 09:20
0.png)
机器人使用的单片机
33
0

12
SOLIDWORKS 2024
2025-02-03 23:01
0.jpg)
机器人手臂仿真在CATIA
51
4
0
CATIA
2021-03-15 10:03
0.png)
自由行走学习四足机器人
54
0
50
STEP
2024-04-26 00:02
0.png)
Darwin达尔文仿真人形机器人外结构3D图纸 Solidworks2015设计
12
0

90
SOLIDWORKS 2015
2024-05-24 08:31
0.png)
G033731-使用LX60电机的机械腿=机器人机械臂
5
0
20
SOLIDWORKS 2023
2025-06-08 09:34
0.jpg)
旋风设计和仿真
11
4
0
SOLIDWORKS 2016
2020-11-05 07:11
基于ADAMS的汽车悬架系统仿真分析与优化
30
0

200
AutoCAD 2007
2024-01-15 00:55
机器人进行建模
27
0
15
STEP
2024-01-31 10:27
1.png)
六足
74
3

5
SOLIDWORKS 2021
2022-08-26 22:42
0.jpg)
用于人造草皮、足球草皮和地毯的维护机器
17
1
0
STEP
2021-11-16 12:11
0_0_364.png)
sw仿生蜘蛛可编辑含参数含配合可用作仿真
12
0
100
SOLIDWORKS 2023
2024-11-08 10:26
0.png)
工业机器人仿真实训室模型
47
0

295
SOLIDWORKS 2016
2024-03-04 01:55
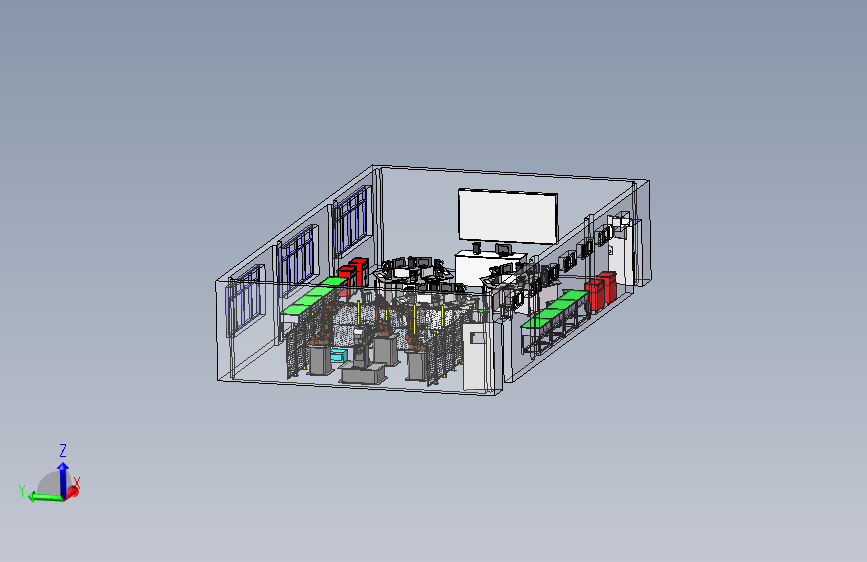
工业机器人仿真实训室模型MF
14
0
225
SOLIDWORKS 2016
2025-05-10 21:08
0.png)
双足联动机器人设计模型
57
0
27
SOLIDWORKS 2017
2024-02-16 19:38
0.png)
四足行走机器人sw模型
58
0
141
SOLIDWORKS 2011
2024-02-16 17:25
0.png)
四足行走机器人sw模型
18
0
140
SOLIDWORKS
2024-02-09 21:35
0_0_364.png)
F0859-四足爬行机器人sw MF
45
5
10
SOLIDWORKS 2017
2023-11-22 21:16
0.png)
heo·Jansen型两足步行机器人
26
0
12
SOLIDWORKS 2015
2023-11-13 14:25

