
登录注册
履带式机器人机械结构设计(二维图+说明书12000+外文翻译+答辩ppt)(ID:1515563)
0.png)
0.png)
0.png)
0.png)
0.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17231072119741.zip | 2.74M |
| 2 | 外文翻译-机器人.doc | 190.00K |
| 3 | 答辩PPT.pptx | 401.21K |
| 4 | 设计说明书.doc | 2.16M |
| 5 | 主动轮1.dwg | 107.47K |
| 6 | 主动轮2.dwg | 107.19K |
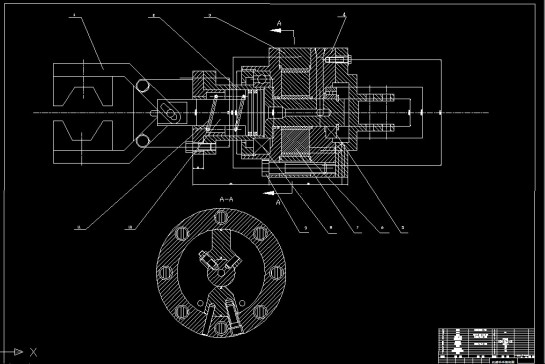
| 7 | 主轴.dwg | 90.75K |
| 8 | 从动轮.dwg | 118.19K |
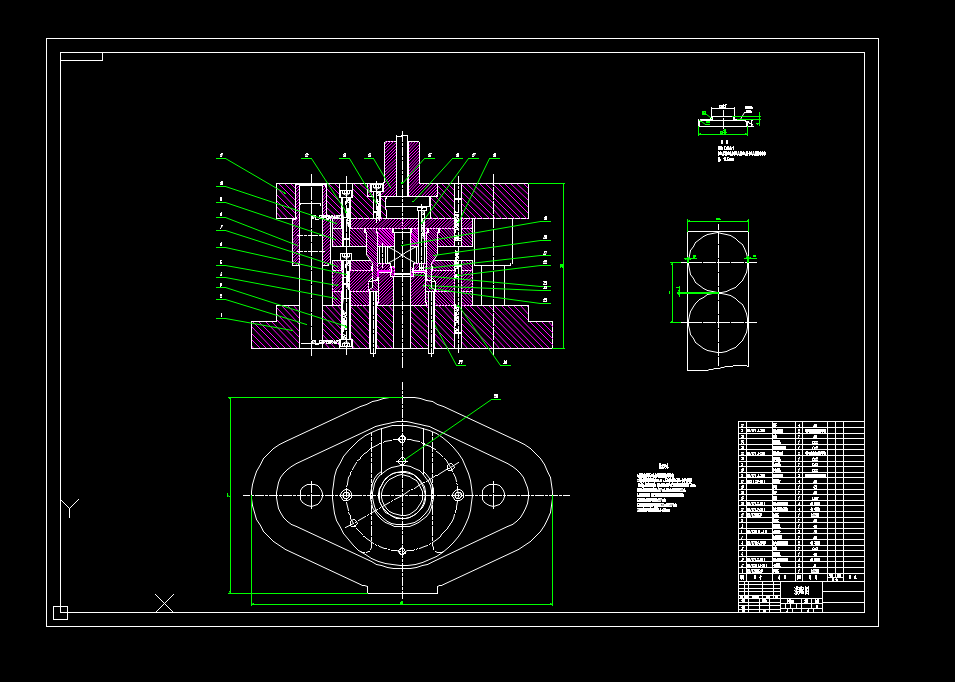
| 9 | 履带装配图.dwg | 257.38K |
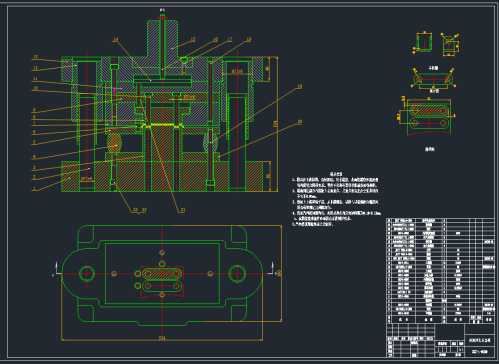
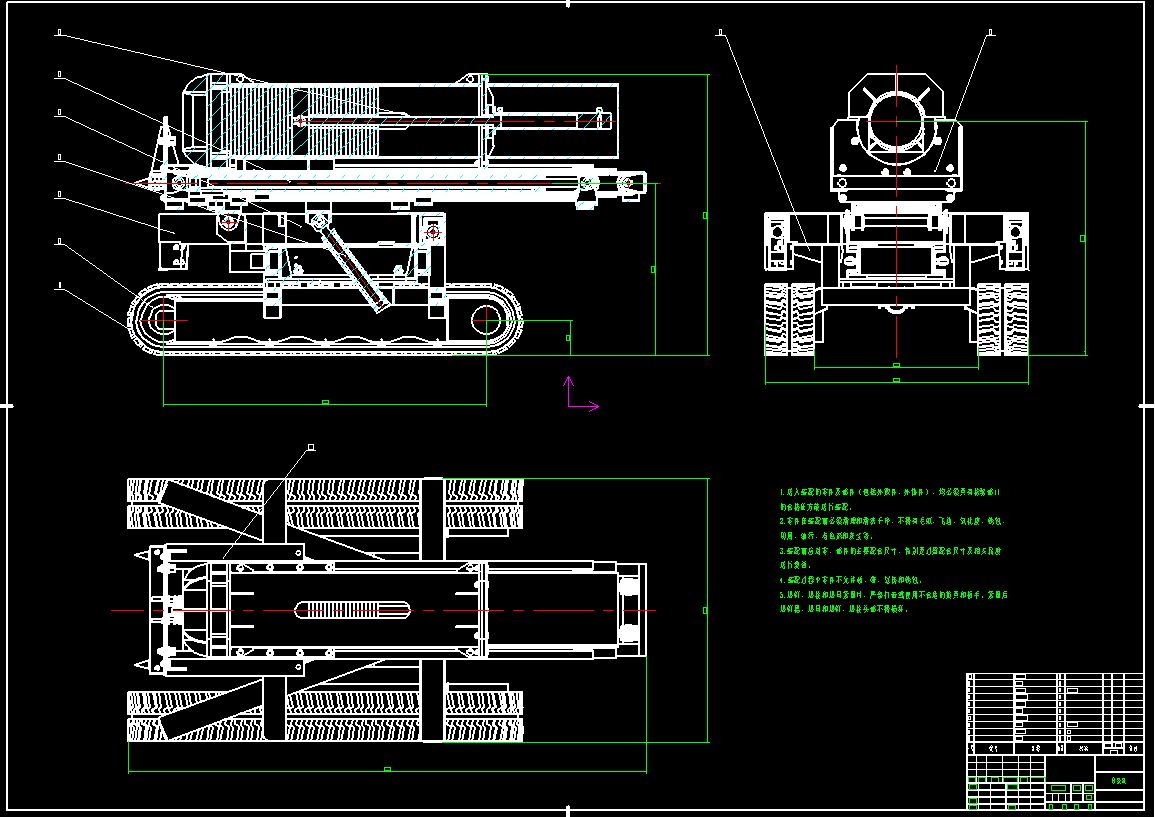
| 10 | 总装图.dwg | 440.97K |
| 11 | 翼板1.dwg | 106.22K |
| 12 | 翼板2.dwg | 100.59K |
| 13 | 辅助轴.dwg | 93.22K |
此图纸下载需要180金币
立即下载
发布者
代做机械毕设和专利设计指导,可联加威18292095705
创作: 183
粉丝: 6
加入时间:2022-07-27
模型信息
图纸格式:dwg
文件大小:2.8M
所需金币:180
上传时间:2024-08-08 16:53:32
是否可编辑:可修改,包括参数
版本:AutoCAD 2004
标签
履带式机器人
机械结构设计
图纸简介
在微小型履带机器人方面美国走在了世界的前列,代表机器人有Packbot机器人,Talon机器人,NUGV等。
我国微小型机器人的研究和开发晚于西方的一些发达国家,我国是从20世纪80年代开始机器人领域的研究的。其中具有代表性的有中国科学院研制的复合移动机器人“灵晰-B”型排爆机器人,“龙卫士Dragon Guard X3B 反恐机器人”,“JW-901 排爆机器人”等。
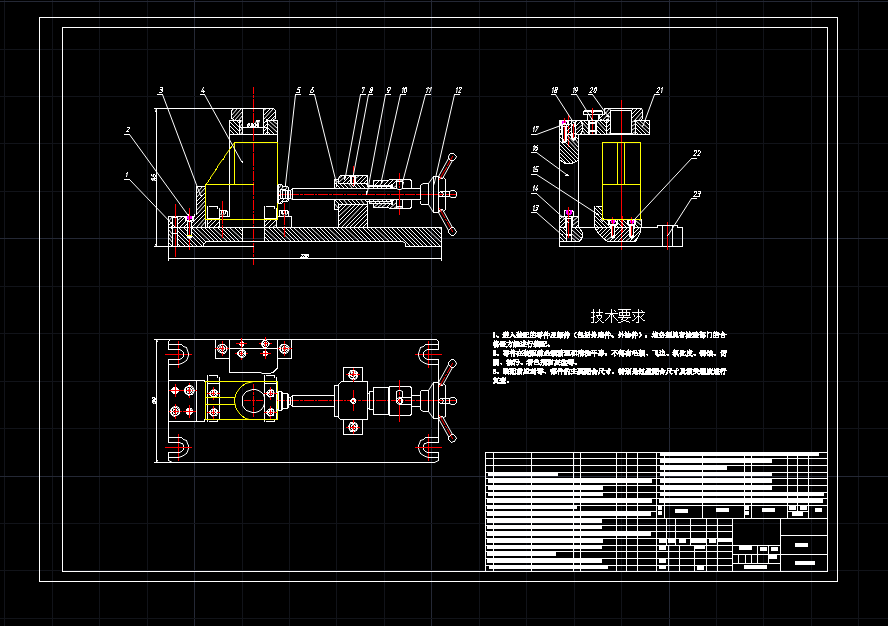
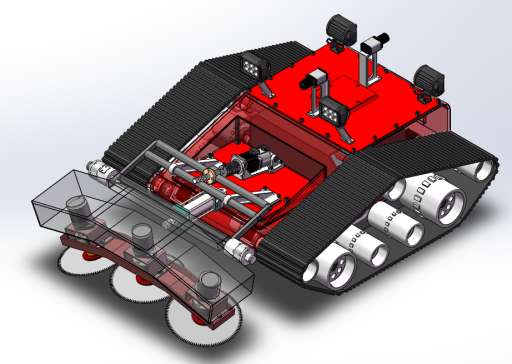
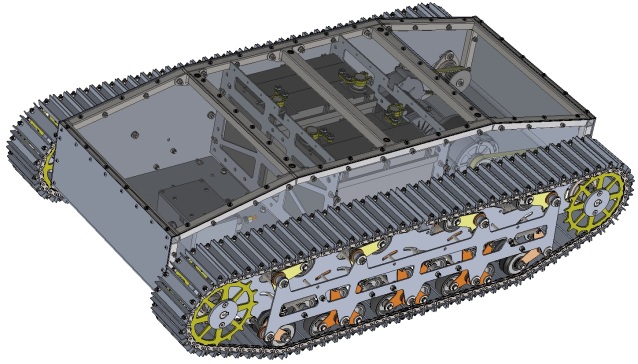
此设计的目的设计结构新颖,能实现过坑、越障等动作。通过在机器人机架上加装其他功能的模块来实现不同的使用功能,本研究的意义是为机器人提供一个动力输出平台,为开发各种功能的机器人提供基础平台。
此设计移动方案的选择是采用了履带式
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多

0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0_0_364.png)
0.png)

0.png)
0.png)

0.png)
0_0_364.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)

