
登录注册
UG五爪夹持机构(ID:1978221)
截图
AI截图渲染
✨AI图片渲染
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17435066577480.rar | 1.92M |
| 2 | 1号连接件.prt | 133.27K |
| 3 | 2号连接件.prt | 125.75K |
| 4 | 五爪夹持机构.prt | 601.29K |
| 5 | 五爪夹持机构_motion1-solution_1.msg | 43.92K |
| 6 | 五爪夹持机构_motion1-solution_1.rad | 391.09K |
| 7 | 五爪夹持机构_motion1-solution_1.rmd | 26.58K |
| 8 | 五爪夹持机构_motion1-solution_1.rplt | 718.27K |
| 9 | 五爪夹持机构_motion1.sim | 152.09K |
| 10 | 固定销.prt | 126.84K |
| 11 | 夹具.prt | 217.96K |
| 12 | 定位销.prt | 117.16K |
| 13 | 支撑盖右.prt | 190.72K |
| 14 | 支撑盖左.prt | 197.10K |
| 15 | 爪式底座.prt | 229.73K |
| 16 | 爪腕.prt | 615.34K |
| 17 | 短销轴.prt | 127.58K |
| 18 | 腕关节.prt | 243.21K |
| 19 | 链接腕.prt | 185.13K |
此图纸下载需要89金币
立即下载
发布者
一品三维工程师
创作: 322
粉丝: 5
加入时间:2024-05-03

模型信息
图纸ID:1978221
图纸格式:prt
文件大小:1.96M
所需金币:89
上传时间:2025-04-01 19:24:19
是否可编辑:可修改,包括参数
软件版本:UG 12
标签
UG技术
机械
五爪夹持机构
图纸简介
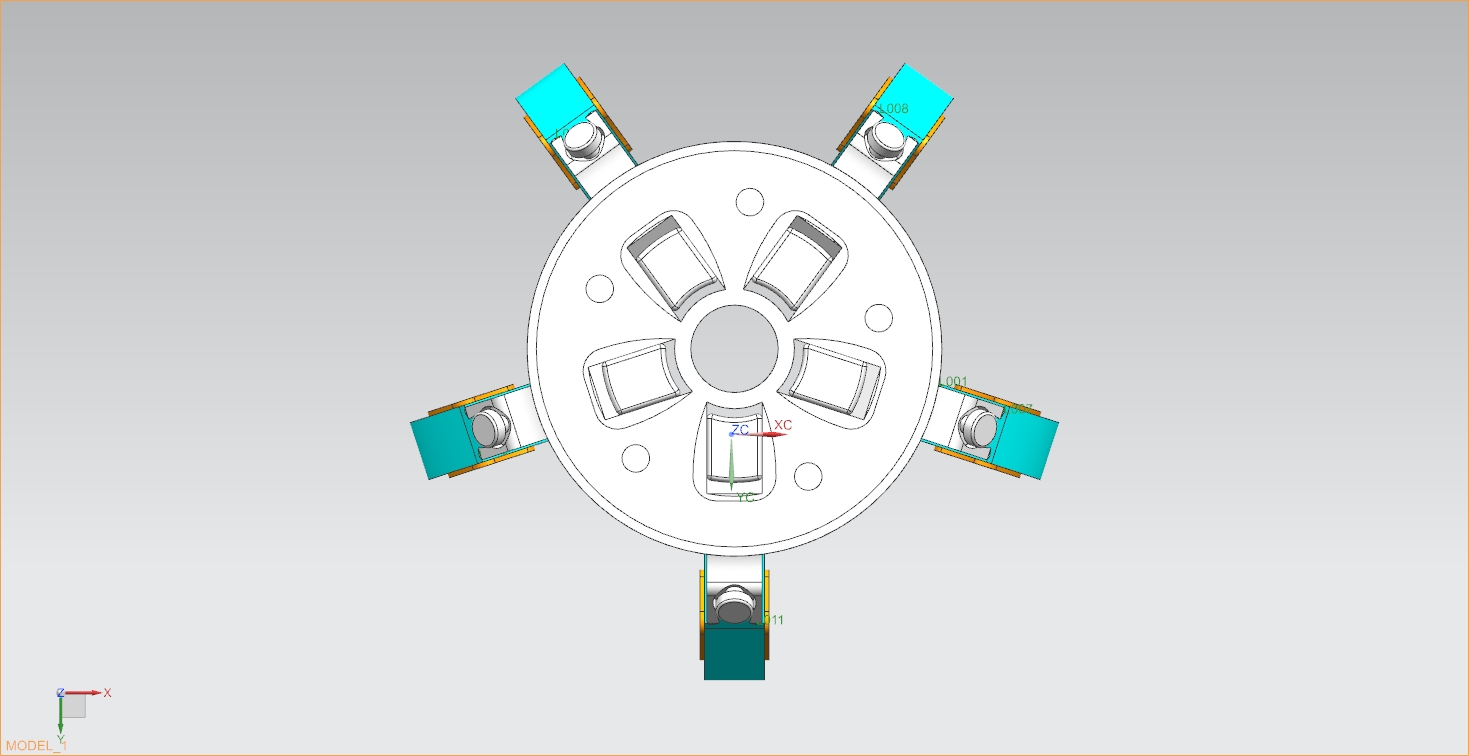
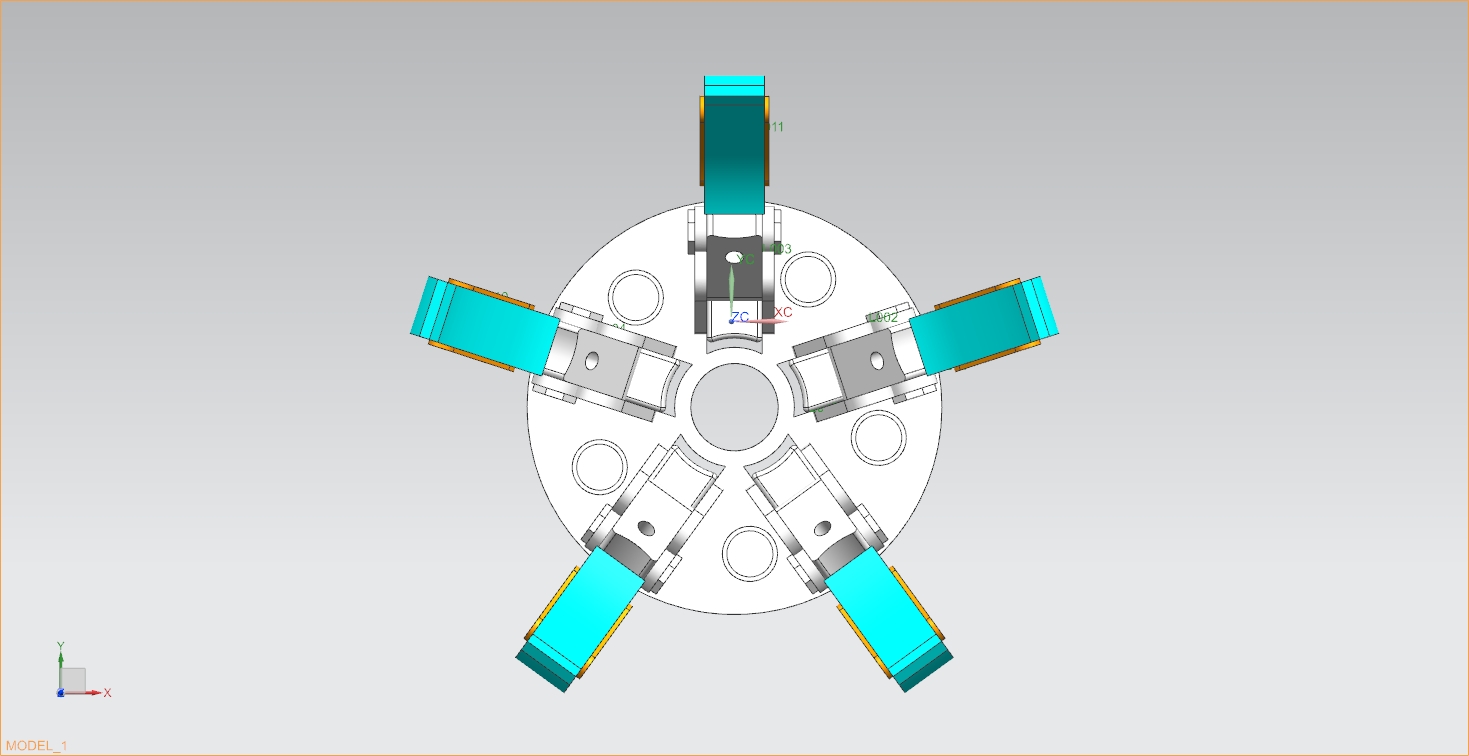
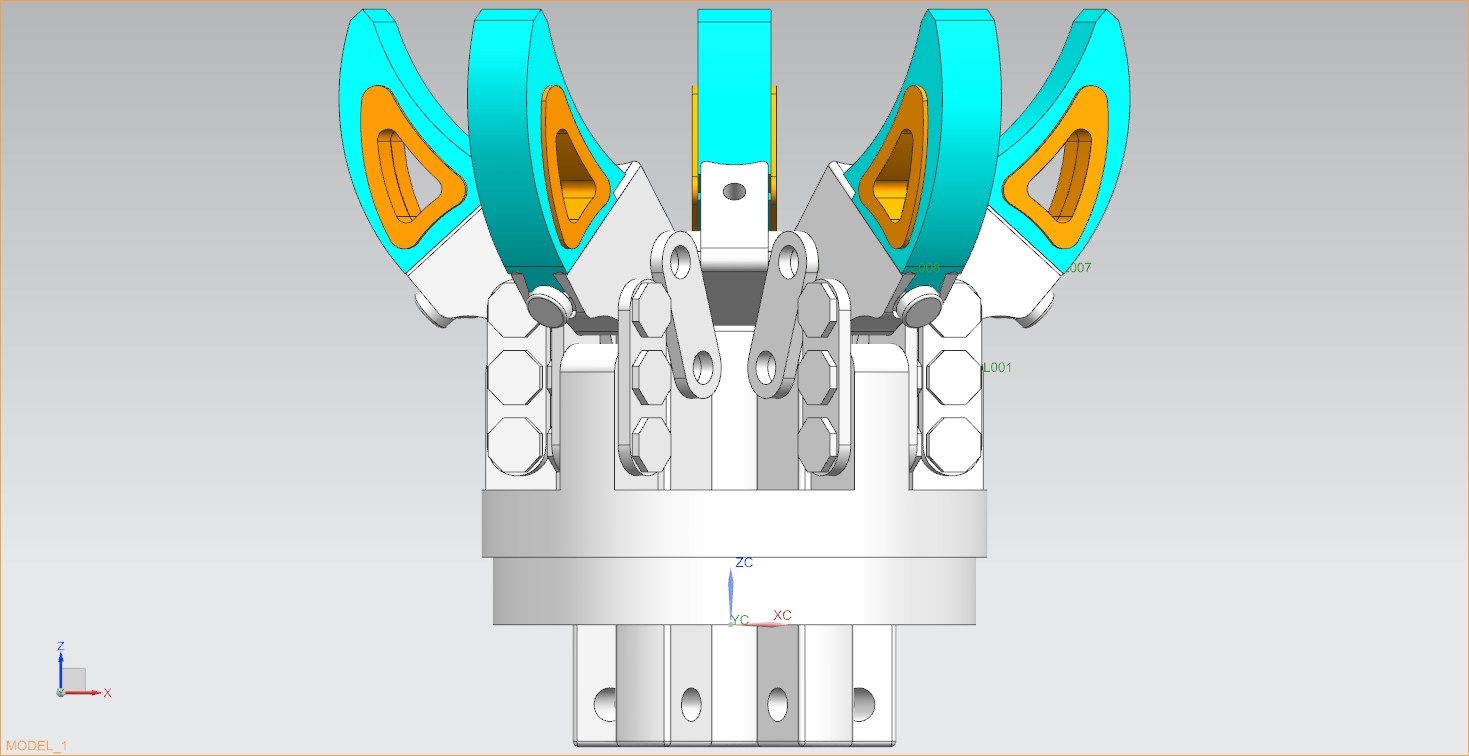
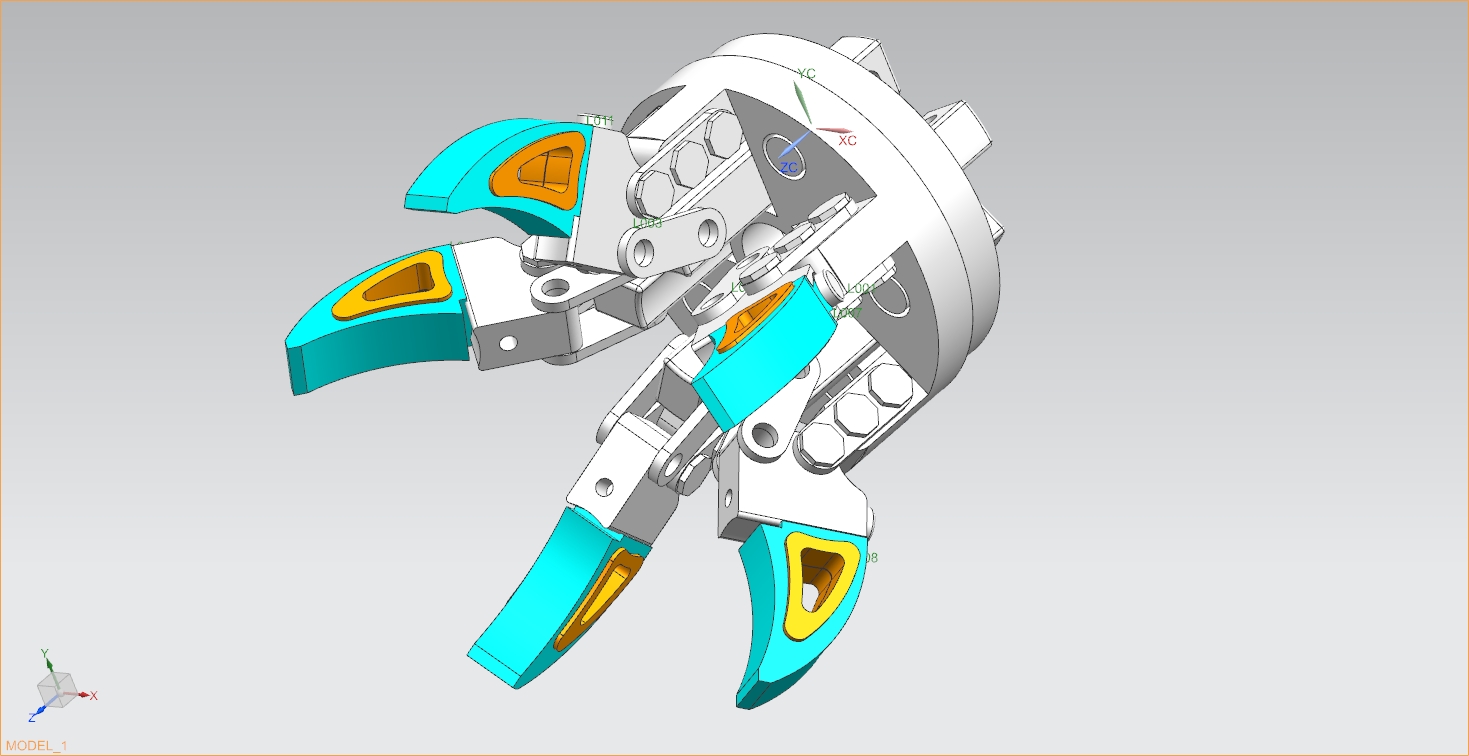
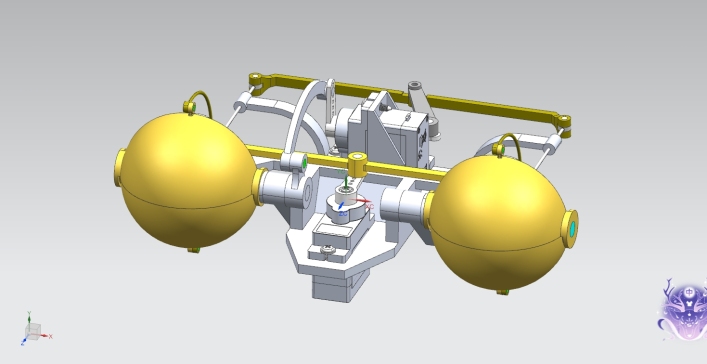
模型明细:五爪夹持机构模型主要包括驱动源、传动组件、五个夹爪和基座。
技术要求
1. 夹爪的同步性要好,张开和闭合的角度误差不超过±0.5°,确保夹持平衡。
2. 夹持力稳定,能根据需求调整,误差控制在±3%以内。
3. 各部件材料需具备足够强度和耐磨性,以保证长期使用。
设计原理
驱动源启动,通过传动组件带动夹爪做同步的张开或闭合动作。当驱动源输出动力时,传动组件将力和运动传递给夹爪,使其实现对物体的夹持或释放。
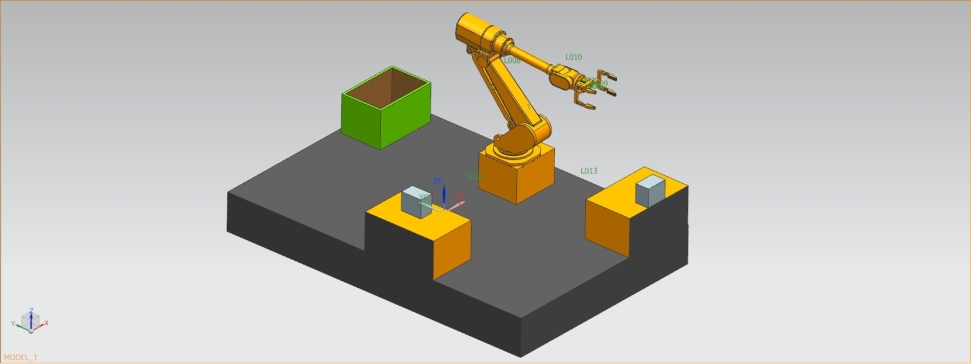
用途
适用于工业生产中的零件抓取、装配,如电子元件安装、机械零件搬运等;也可用于实验设备中对小型物体的固定,提高操作的准确性和效率。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
AI渲染-将平面图渲染为真实效果图
原图
渲染图
正在渲染中,请稍候...

