
登录注册
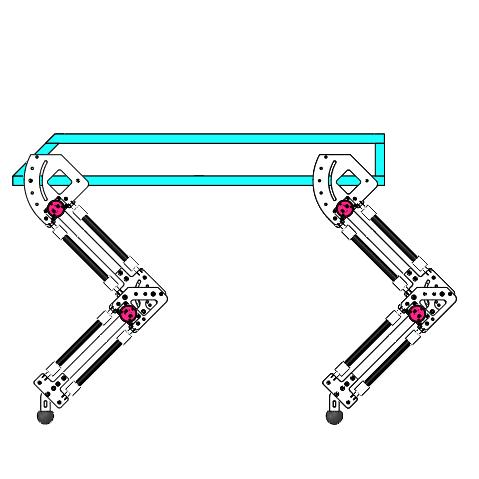
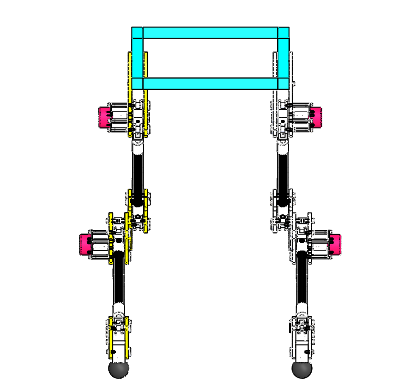
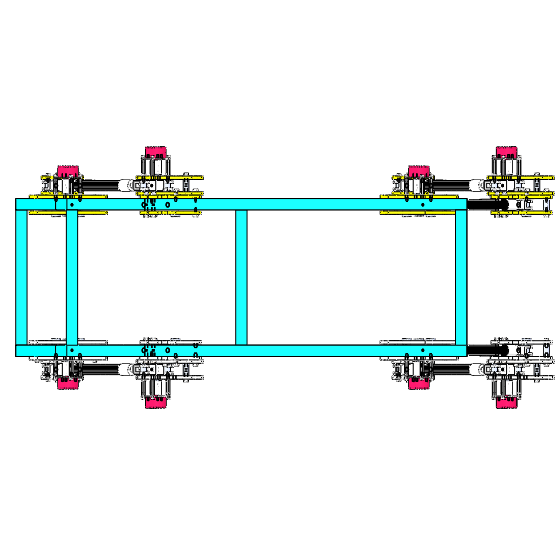
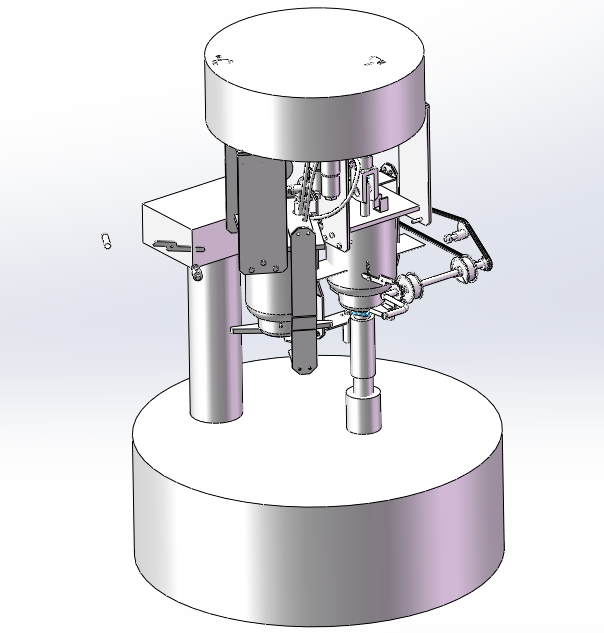
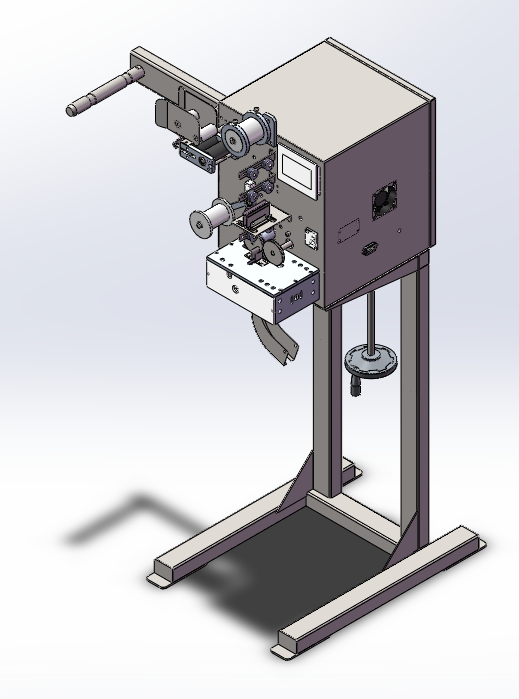
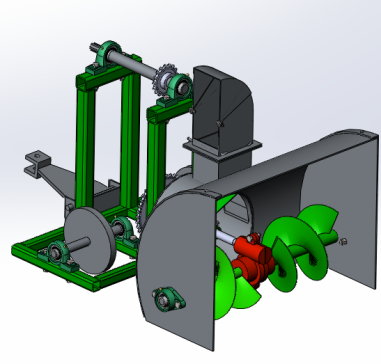
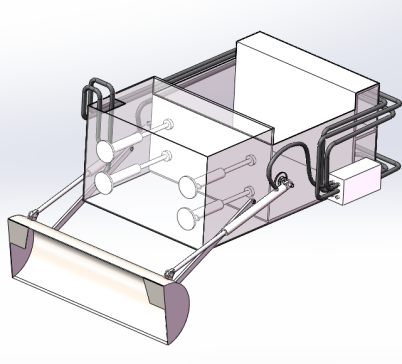
四足机器人机械狗(ID:2059906)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 1745382390683.rar | 16.61M |
| 2 | 2020B-1-副本.SLDPRT | 45.16K |
| 3 | 2020B-1.SLDPRT | 55.74K |
| 4 | 2020B.SLDPRT | 37.08K |
| 5 | 2020L-1.SLDPRT | 42.34K |
| 6 | 2020L.SLDPRT | 47.81K |
| 7 | A4.SLDDRW | 375.50K |
| 8 | B27.8M-3FM1-8.sldprt | 265.00K |
| 9 | M4x10.sldprt | 604.50K |
| 10 | M4x8.sldprt | 647.00K |
| 11 | M5x12.sldprt | 656.50K |
| 12 | M5平头.sldprt | 597.00K |
| 13 | 关节轴.SLDDRW | 533.00K |
| 14 | 关节轴.SLDPRT | 96.30K |
| 15 | 关节连接件-1.SLDDRW | 654.00K |
| 16 | 关节连接件-1.SLDPRT | 154.98K |
| 17 | 关节连接件.SLDDRW | 639.00K |
| 18 | 关节连接件.SLDPRT | 198.65K |
| 19 | 关节连接件1-1.SLDDRW | 578.00K |
| 20 | 关节连接件1-1.SLDPRT | 153.35K |
| 21 | 关节连接件1-2.SLDDRW | 600.00K |
| 22 | 关节连接件1-2.SLDPRT | 191.03K |
| 23 | 关节连接件2-1.SLDDRW | 953.50K |
| 24 | 关节连接件2-1.SLDPRT | 116.98K |
| 25 | 关节连接件2.SLDDRW | 479.00K |
| 26 | 关节连接件2.SLDPRT | 109.12K |
| 27 | 关节连接件21-1.SLDPRT | 119.42K |
| 28 | 关节连接件21.SLDPRT | 108.56K |
| 29 | 关节连接件3-1.SLDDRW | 621.50K |
| 30 | 关节连接件3-1.SLDPRT | 184.34K |
| 31 | 关节连接件3.SLDDRW | 566.00K |
| 32 | 关节连接件3.SLDPRT | 152.89K |
| 33 | 关节连接件31-1.SLDDRW | 545.50K |
| 34 | 关节连接件31-1.SLDPRT | 187.82K |
| 35 | 关节连接件31.SLDDRW | 513.00K |
| 36 | 关节连接件31.SLDPRT | 146.96K |
| 37 | 四足机器人腿-1.SLDASM | 1.08M |
| 38 | 四足机器人腿-20241127.x_t | 695.14K |
| 39 | 四足机器人腿.SLDASM | 1003.32K |
| 40 | 四足机器人腿黑白.SLDASM | 1.83M |
| 41 | 接头.SLDDRW | 452.00K |
| 42 | 接头.SLDPRT | 114.18K |
| 43 | 支架.SLDDRW | 563.00K |
| 44 | 支架.SLDPRT | 193.37K |
| 45 | 支柱-1.SLDDRW | 402.00K |
| 46 | 支柱-1.SLDPRT | 69.94K |
| 47 | 支柱.SLDDRW | 408.00K |
| 48 | 支柱.SLDPRT | 74.93K |
| 49 | 气动肌肉.SLDPRT | 58.03K |
| 50 | 测支架重量.SLDASM | 599.00K |
| 51 | 测量用装配体.SLDASM | 710.50K |
| 52 | 电位器.SLDPRT | 114.97K |
| 53 | 电位器安装座.SLDDRW | 465.50K |
| 54 | 电位器安装座.SLDPRT | 112.68K |
| 55 | 联轴器.SLDPRT | 66.02K |
| 56 | 装配体-全肘.SLDASM | 1.54M |
| 57 | 装配体.SLDASM | 2.03M |
| 58 | 足.SLDPRT | 240.00K |
| 59 | 足端.SLDPRT | 123.35K |
| 60 | 踝关节.SLDDRW | 554.00K |
| 61 | 踝关节.SLDPRT | 94.29K |
| 62 | 转轴.SLDDRW | 402.00K |
| 63 | 转轴.SLDPRT | 108.50K |
| 64 | 轴承.SLDPRT | 1.07M |
| 65 | 轴销-1.SLDDRW | 422.00K |
| 66 | 轴销-1.SLDPRT | 86.01K |
| 67 | 轴销.SLDDRW | 432.50K |
| 68 | 轴销.SLDPRT | 86.98K |
| 69 | 铜柱.SLDPRT | 60.05K |
| 70 | 髋关节连接件1-1.SLDDRW | 586.50K |
| 71 | 髋关节连接件1-1.SLDPRT | 150.57K |
| 72 | 髋关节连接件1-副本.SLDPRT | 347.50K |
| 73 | 髋关节连接件1.SLDDRW | 617.00K |
| 74 | 髋关节连接件1.SLDPRT | 148.99K |
| 75 | 髋关节连接件2-2.SLDDRW | 579.50K |
| 76 | 髋关节连接件2-2.SLDPRT | 191.76K |
| 77 | 髋关节连接件2.SLDDRW | 659.00K |
| 78 | 髋关节连接件2.SLDPRT | 189.40K |
| 79 | 1.SLDPRT | 225.00K |
| 80 | 2.SLDPRT | 142.00K |
| 81 | 3.SLDPRT | 131.50K |
| 82 | 4040H.SLDPRT | 146.00K |
| 83 | 4040L-400.SLDPRT | 140.00K |
| 84 | 4040L.SLDPRT | 140.00K |
| 85 | 总装-全肘.SLDASM | 1.41M |
| 86 | 总装.SLDASM | 1.41M |
此图纸下载需要50金币
立即下载
发布者
秦春玲
创作: 113
粉丝: 2
加入时间:2024-03-27

模型信息
图纸格式:sldprt,slddrw,sldasm,x_t
文件大小:17.01M
所需金币:50
上传时间:2025-04-23 12:27:12
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2014
标签
图纸简介
四足机器人有着外形更易接受、普适陆地移动等优势。作为一种多足机器人,它比双足机器人承载能力强、稳定性好,比六足、八足机器人结构简单,因此受到国内外研究人员的重视。可以用于军事物资运输、危险环境探测、教育和娱乐等领域,有着非常广阔的应用前景。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)

猜你喜欢
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)


0.png)
0.png)
0.png)
0.png)

0.png)
0.png)

