
登录注册
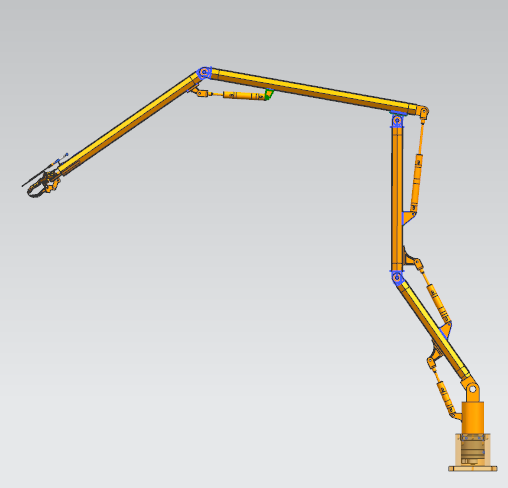
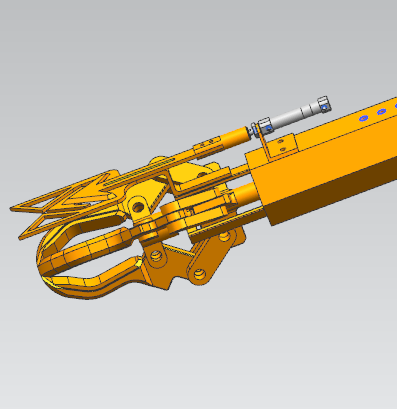
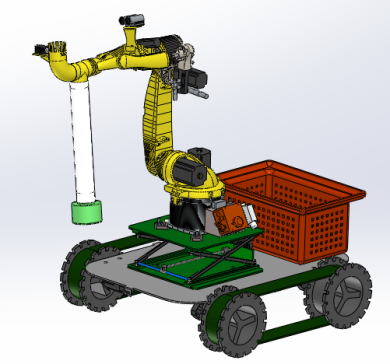
水果采摘机器人(ID:2129117)

0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17474712249796.rar | 11.15M |
| 2 | 1145127DSM-T-63-270-A-B--0.prt | 231.53K |
| 3 | 1145127DSM-T-63-270-A-B--0_552083DSM-63-270-A-B_G---T.prt | 473.96K |
| 4 | 1145127DSM-T-63-270-A-B--0_552083DSM-63-270-A-B_K---T.prt | 298.73K |
| 5 | 1145127DSM-T-63-270-A-B--0_714510DSM-63_NS.prt | 118.49K |
| 6 | 1908309DSNU-25-60-P-A---0.prt | 231.13K |
| 7 | 1908309DSNU-25-60-P-A---0_1908309DSNU-25-60-P---A----0-ZR.prt | 399.92K |
| 8 | 1908309DSNU-25-60-P-A---0_1908309DSNU-25-60-P---A---00--0-KS.prt | 169.94K |
| 9 | 1908309DSNU-25-60-P-A---0_DIN-439-B-M10x1_25F.prt | 135.48K |
| 10 | 1908309DSNU-25-60-P-A---0_DIN-439-B-M22x1_5F.prt | 136.69K |
| 11 | 195984DSNU-32-100-P-A---0.prt | 229.13K |
| 12 | 195984DSNU-32-100-P-A---0_195984DSNU-32-100-P---A----0-ZR.prt | 380.37K |
| 13 | 195984DSNU-32-100-P-A---0_195984DSNU-32-100-P---A---00--0-KS.prt | 164.49K |
| 14 | 195984DSNU-32-100-P-A---0_3753M30x1_5.prt | 167.44K |
| 15 | 195984DSNU-32-100-P-A---0_DIN-439-B-M10x1_25F.prt | 135.54K |
| 16 | 2.prt | 429.85K |
| 17 | 22.prt | 154.85K |
| 18 | 222.prt | 639.82K |
| 19 | 2222.prt | 633.95K |
| 20 | 22222.prt | 630.62K |
| 21 | 5211900DSNU-S-12-30-P-A-MQ---0.prt | 151.33K |
| 22 | 5211900DSNU-S-12-30-P-A-MQ---0_5362901M10x1.prt | 141.88K |
| 23 | 5211900DSNU-S-12-30-P-A-MQ---0_8112003DSNU-S-12-30-P---P.prt | 147.36K |
| 24 | 5211900DSNU-S-12-30-P-A-MQ---0_8112003DSNU-S-12-30-P-MQ---C.prt | 234.06K |
| 25 | UG装配.prt | 483.49K |
| 26 | 刀-活塞连杆.prt | 702.65K |
| 27 | 刀.prt | 499.33K |
| 28 | 刀滑柱.prt | 490.66K |
| 29 | 刀片.prt | 343.25K |
| 30 | 固定脚架1.prt | 208.07K |
| 31 | 大臂-小臂气缸.prt | 815.67K |
| 32 | 大臂-小臂气缸前盖.prt | 791.51K |
| 33 | 大臂-小臂气缸双耳环支座.prt | 213.40K |
| 34 | 大臂-小臂气缸后盖.prt | 819.34K |
| 35 | 大臂-小臂气缸支座.prt | 354.61K |
| 36 | 大臂-小臂气缸活塞杆.prt | 586.90K |
| 37 | 大臂-小臂气缸活塞杆双耳环.prt | 274.58K |
| 38 | 大臂-小臂气缸缸筒.prt | 128.60K |
| 39 | 大臂1.prt | 273.76K |
| 40 | 大臂2-底座连接块.prt | 224.09K |
| 41 | 大臂2.prt | 242.25K |
| 42 | 夹紧气缸支座.prt | 184.68K |
| 43 | 小臂.prt | 256.83K |
| 44 | 小臂2-大臂1连接块.prt | 237.39K |
| 45 | 底座-大臂气缸1支座.prt | 201.75K |
| 46 | 底座-大臂连接块.prt | 207.73K |
| 47 | 底座.prt | 320.81K |
| 48 | 底座2.prt | 351.53K |
| 49 | 底座3.prt | 179.76K |
| 50 | 手爪-手腕连接块.prt | 206.71K |
| 51 | 手腕-小臂连接块.prt | 197.22K |
| 52 | 手腕外壳-手腕外壳2连接块.prt | 231.87K |
| 53 | 手腕外壳2.prt | 295.19K |
| 54 | 手腕外壳2气缸支座.prt | 280.97K |
| 55 | 手腕连接块.prt | 197.49K |
| 56 | 气缸活塞杆-50行程.prt | 156.79K |
| 57 | 气缸活塞杆40-150行程.prt | 155.55K |
| 58 | 气缸缸筒-40-150行程.prt | 129.55K |
| 59 | 气缸缸筒40-105-50行程.prt | 128.59K |
| 60 | 气缸耳环支座.prt | 290.14K |
| 61 | 腕-小臂双耳环支座.prt | 307.83K |
| 62 | 腕-小臂气缸前端盖.prt | 229.75K |
| 63 | 腕-小臂气缸双耳环.prt | 236.18K |
| 64 | 腕-小臂气缸后端盖.prt | 264.60K |
| 65 | 腕-小臂气缸活塞杆.prt | 180.50K |
| 66 | 腕-小臂气缸缸筒.prt | 136.78K |
| 67 | 腕-小臂气缸装配.prt | 128.95K |
此图纸下载需要20金币
立即下载
发布者
秦春玲
创作: 113
粉丝: 1
加入时间:2024-03-27

模型信息
图纸格式:prt
文件大小:11.41M
所需金币:20
上传时间:2025-05-17 16:40:38
是否可编辑:可修改,包括参数
版本:UG 12
标签
图纸简介
水果采摘机器人在农业中的主要作用包括提高采摘效率、降低成本、减少人为错误和损伤、适应恶劣环境等,它们能够根据不同水果的成熟度进行精准识别和采摘,避免了人工采摘中的浪费和失误,该模型为ug12版本
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
作者其它图纸 查看更多
0.png)
0.png)
猜你喜欢
0.png)
0.png)
0.png)
0_0_364.png)
0.png)
0.png)
0.png)

0.png)
0.png)

0.png)
0.png)
0.png)
0.png)

0.png)
0.png)
0.png)
0.png)

