
登录注册
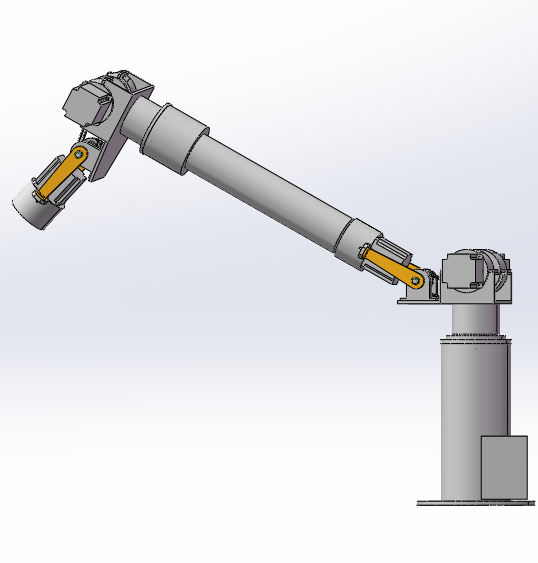
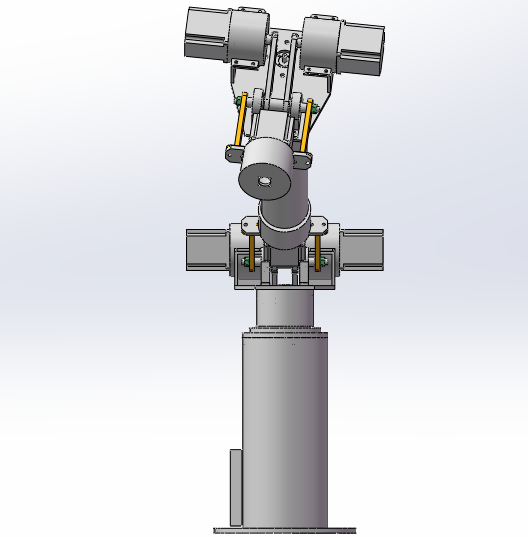
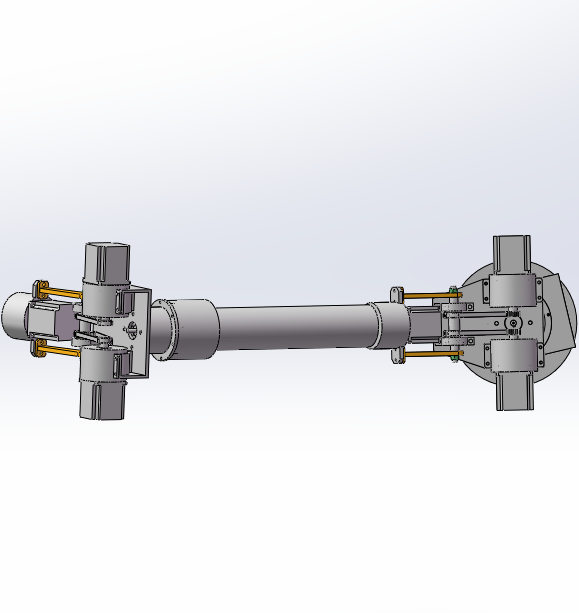
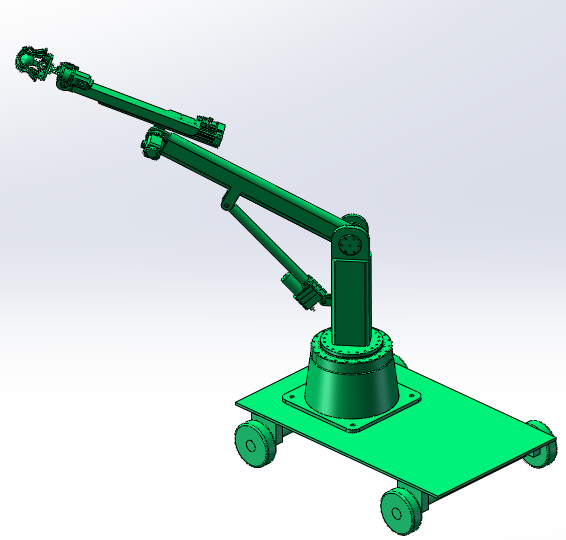
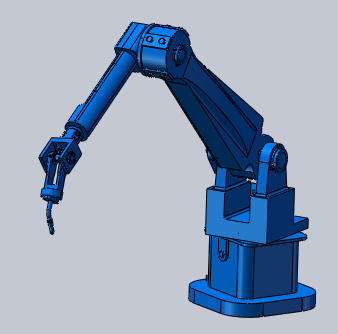
机器人机械手(ID:2347015)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17514509839354.rar | 1.37M |
| 2 | 6004轴承-1.sldasm | 95.00K |
| 3 | 6004轴承-2.sldasm | 94.50K |
| 4 | 6004轴承-3.sldasm | 94.50K |
| 5 | 6004轴承.sldasm | 95.00K |
| 6 | 6004轴承_bq.sldprt | 83.50K |
| 7 | 6004轴承_nh.sldprt | 45.00K |
| 8 | 6004轴承_qiu.sldprt | 42.50K |
| 9 | 6004轴承_wq.sldprt | 45.00K |
| 10 | M12螺母.sldprt | 46.50K |
| 11 | 减速器连接筒.sldprt | 46.00K |
| 12 | 减速机EPL-40-07.sldprt | 50.00K |
| 13 | 减速机EPL-64-07.sldprt | 51.00K |
| 14 | 同步带.sldprt | 45.50K |
| 15 | 同步带轮1.sldprt | 77.00K |
| 16 | 同步带轮2.sldprt | 93.00K |
| 17 | 回转单元.sldasm | 88.00K |
| 18 | 大臂.sldprt | 49.00K |
| 19 | 小臂回转单元1-1.sldasm | 85.00K |
| 20 | 小臂回转单元1-2.sldasm | 85.00K |
| 21 | 小臂回转单元1-3.sldasm | 85.00K |
| 22 | 小臂回转单元1.sldasm | 85.00K |
| 23 | 小臂回转电机座.sldprt | 53.00K |
| 24 | 小臂组件-1.sldasm | 84.50K |
| 25 | 小臂组件.sldasm | 84.50K |
| 26 | 总装.SLDASM | 825.00K |
| 27 | 摆动杆.sldprt | 49.50K |
| 28 | 摆动组件Default-_flexible1.sldasm | 98.00K |
| 29 | 摆动组件Default.sldasm | 97.00K |
| 30 | 步进电机86HS38.sldprt | 53.50K |
| 31 | 步进电机86HS85.sldprt | 53.50K |
| 32 | 电机连接筒.sldprt | 47.50K |
| 33 | 腰支撑筒.sldprt | 48.50K |
| 34 | 轴.sldprt | 55.00K |
| 35 | 轴承座.sldprt | 47.00K |
| 36 | 连接件1.sldprt | 47.00K |
| 37 | 连接件2.sldprt | 54.00K |
| 38 | 连接件3.sldprt | 48.50K |
| 39 | 连接座.sldprt | 58.50K |
| 40 | 隔套.sldprt | 43.00K |
此图纸下载需要1金币
立即下载
发布者
秦春玲
创作: 105
粉丝: 1
加入时间:2024-03-27

模型信息
图纸格式:sldasm,sldprt
文件大小:1.4M
所需金币:1
上传时间:2025-07-02 18:09:47
是否可编辑:可修改,不包括参数
版本:SOLIDWORKS 2012
标签
图纸简介
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。

0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

