
登录注册
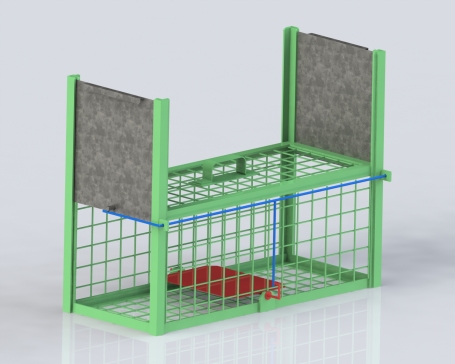
海胆海参捕捞机器人的设计(ID:893525)



| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17056425663727.rar | 57.21M |
| 2 | 仿真视频.mp4 | 5.80M |
| 3 | 说明书5.10.docx | 5.77M |
| 4 | 56GP-57L2440D直流马达.SLDPRT | 345.01K |
| 5 | BODY-L_BaseModel20221026123041.sldprt | 140.52K |
| 6 | BODY-R_BaseModel20221026123041.sldprt | 139.66K |
| 7 | full_cage.SLDPRT | 1.15M |
| 8 | O型密封圈17X1.8.SLDPRT | 89.52K |
| 9 | O型密封圈20X3.55.SLDPRT | 78.57K |
| 10 | O型密封圈25X1.8.SLDPRT | 92.86K |
| 11 | O型密封圈50x3.55.SLDPRT | 98.79K |
| 12 | robot_painter_02.SLDPRT | 11.59M |
| 13 | SHAFT_BaseModel20221026123041.sldprt | 80.54K |
| 14 | 万向节联轴器1.SLDPRT | 164.66K |
| 15 | 万向节联轴器2.SLDPRT | 53.21K |
| 16 | 上盖.SLDPRT | 318.26K |
| 17 | 上盖1.SLDPRT | 392.92K |
| 18 | 上盖1.STEP | 399.40K |
| 19 | 侧边盖.SLDPRT | 123.63K |
| 20 | 合页.SLDASM | 145.64K |
| 21 | 圆锥滚子轴承-32904.SLDPRT | 730.08K |
| 22 | 圆锥滚子轴承-32905.SLDPRT | 823.15K |
| 23 | 圆锥齿轮-22.SLDPRT | 893.49K |
| 24 | 套筒1-31.SLDPRT | 65.51K |
| 25 | 套筒2-23.SLDPRT | 92.29K |
| 26 | 拉手.SLDPRT | 80.75K |
| 27 | 挡环1-16.SLDPRT | 93.74K |
| 28 | 挡环3-24.SLDPRT | 94.40K |
| 29 | 推进器.SLDPRT | 716.43K |
| 30 | 推进器密封座-12.SLDPRT | 145.80K |
| 31 | 推进器连接杆-01.SLDPRT | 99.52K |
| 32 | 支座1-15.SLDPRT | 155.30K |
| 33 | 支座2-25.SLDPRT | 186.60K |
| 34 | 散热器.SLDPRT | 195.32K |
| 35 | 框架-1128.SLDPRT | 289.12K |
| 36 | 框架-28.SLDPRT | 286.36K |
| 37 | 法兰1-13.SLDPRT | 98.80K |
| 38 | 法兰2-19.SLDPRT | 92.73K |
| 39 | 法兰3-20.SLDPRT | 96.77K |
| 40 | 法兰4-27.SLDPRT | 95.56K |
| 41 | 浮体-08.SLDPRT | 220.08K |
| 42 | 海参捕捉机器人.SLDASM | 7.76M |
| 43 | 潜航器定位条-02.SLDPRT | 72.10K |
| 44 | 潜航器连接环-11.SLDPRT | 92.27K |
| 45 | 照明灯.SLDPRT | 443.83K |
| 46 | 玻璃板-21.SLDPRT | 164.06K |
| 47 | 电机支座-32.SLDPRT | 160.79K |
| 48 | 相机.SLDPRT | 470.12K |
| 49 | 笼子.SLDPRT | 1.01M |
| 50 | 联轴器.SLDPRT | 77.64K |
| 51 | 聚氟四乙烯滑环20X3.55.SLDPRT | 103.90K |
| 52 | 聚氟四乙烯滑环25X1.8.SLDPRT | 92.91K |
| 53 | 轴2-29.SLDPRT | 136.58K |
| 54 | 轴3-17.SLDPRT | 108.90K |
| 55 | 连接柱1-03.SLDPRT | 61.20K |
| 56 | 连接柱2-04.SLDPRT | 68.71K |
| 57 | 连接柱3-07.SLDPRT | 61.87K |
| 58 | 锥齿轮轴-30.SLDPRT | 560.74K |
| 59 | 镜向推进器.SLDPRT | 273.00K |
| 60 | 零件1.SLDPRT | 262.68K |
| 61 | 上端盖+框架+底板+电基座+浮板手柄散热器.dwg | 1.57M |
| 62 | 传动轴A3.dwg | 224.58K |
| 63 | 大圆锥齿轮A3.dwg | 170.46K |
| 64 | 套筒1A3.dwg | 195.60K |
| 65 | 套筒A3.dwg | 123.13K |
| 66 | 推进器密封座A3.dwg | 212.33K |
| 67 | 推进器连接杆A3.dwg | 96.88K |
| 68 | 机器人.DWG | 988.46K |
| 69 | 机械手.dwg | 564.98K |
| 70 | 法兰A3.dwg | 98.78K |
| 71 | 海胆捕捉机器A0.dwg | 1.12M |
| 72 | 海胆捕捉机器人修改.dwg | 766.54K |
| 73 | 电机支座A3.dwg | 181.36K |
| 74 | 笼子+开门合页.dwg | 539.56K |
| 75 | 连接柱1A3.dwg | 166.10K |
| 76 | ~$套筒2.SLDDRW | 6B |
| 77 | 传动轴A3.SLDDRW | 153.58K |
| 78 | 传动轴A3.SLDPRT | 562.46K |
| 79 | 大圆锥齿轮A3.SLDPRT | 780.78K |
| 80 | 套筒.SLDDRW | 113.21K |
| 81 | 套筒1A3.SLDPRT | 476.94K |
| 82 | 套筒2.SLDDRW | 81.39K |
| 83 | 套筒A3.SLDPRT | 434.92K |
| 84 | 推进器密封座A3.SLDPRT | 482.70K |
| 85 | 推进器连接杆A3.SLDPRT | 445.20K |
| 86 | 法兰.SLDDRW | 82.90K |
| 87 | 法兰A3.SLDPRT | 401.08K |
| 88 | 海胆捕捉机器人.SLDDRW | 671.80K |
| 89 | 海胆捕捉机器人A0.SLDPRT | 6.74M |
| 90 | 电机支座.SLDDRW | 134.63K |
| 91 | 电机支座A3.SLDPRT | 439.80K |
| 92 | 连接柱.SLDDRW | 103.70K |
| 93 | 连接柱1A3.SLDPRT | 518.20K |
此图纸下载需要340金币
立即下载
发布者
183****2053
创作: 213
粉丝: 28
加入时间:2024-01-18

模型信息
图纸格式:sldprt,step,sldasm,dwg,slddrw
文件大小:58.58M
所需金币:340
上传时间:2024-01-19 13:36:20
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2020
标签
海参捕捉
海胆 捕捞
海底捕捞
螃蟹捕捉
海星捕捉
图纸简介
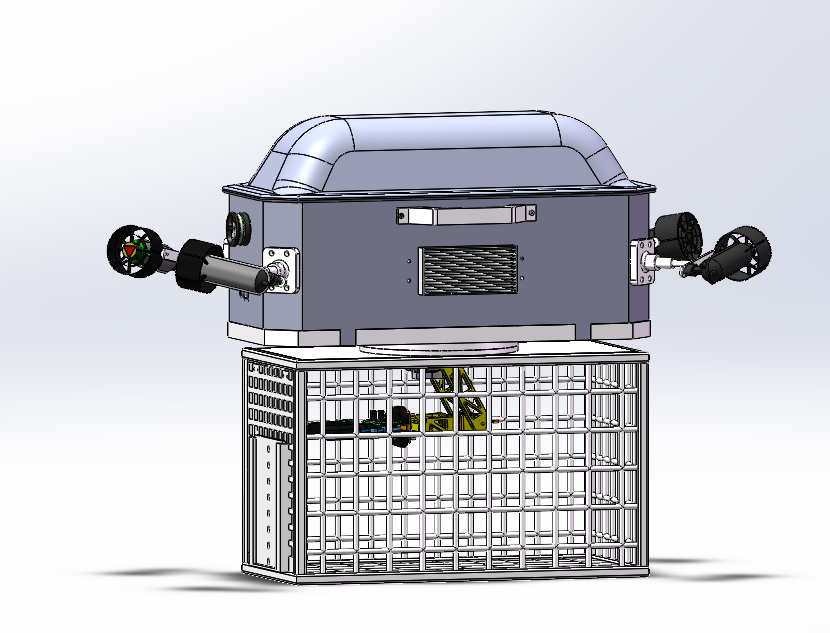
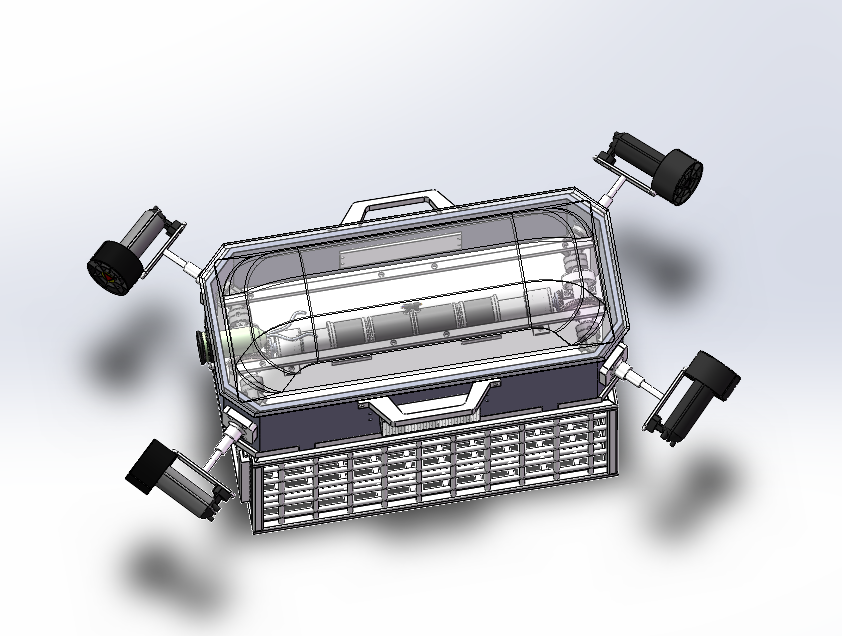
本次设计主要是设计的海参海胆捕捉机器人采用推进器进行驱动采用 机械手进行海参海胆的捕捉,资料包含三维图 二维图 仿真是哦 设计说明书
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.png)
0.png)
0.png)

0.jpg)
0.jpg)
0.jpg)
0.jpg)
0.jpg)

0.jpg)
0.png)
0.png)
0.jpg)
0_0_364.png)
0.jpg)
0.png)
0.jpg)
0.jpg)
0.png)
0.jpg)

